You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Wabco Atc CanDocument36 pagesWabco Atc CanCostel Caraman100% (1)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- CD4066 PDFDocument20 pagesCD4066 PDFZaini AascNo ratings yet
- DELTA VFD-L Quickstart ManualDocument16 pagesDELTA VFD-L Quickstart ManualManojh sebastienNo ratings yet
- Isolated Flyback Switching Regulator W - 9V OutputDocument16 pagesIsolated Flyback Switching Regulator W - 9V OutputCasey DialNo ratings yet
- Power Supply Trainer Using Lm723 IcDocument8 pagesPower Supply Trainer Using Lm723 IcDinesh Kumar MehraNo ratings yet
- Hardware in The Loop Simulation For Hybrid Electric Vehicles dSPACE - SAE - 0901 0198Document8 pagesHardware in The Loop Simulation For Hybrid Electric Vehicles dSPACE - SAE - 0901 0198nrayamNo ratings yet
- Mechatronics Foundational Technical SkillsDocument25 pagesMechatronics Foundational Technical SkillsdalbaasNo ratings yet
- Grid Code Compliance Test Procedure For Wind FarmsDocument41 pagesGrid Code Compliance Test Procedure For Wind Farmsrai28xNo ratings yet
- Mentor IIDocument114 pagesMentor IIHòa Trịnh0% (1)
- Features: Lt1375/Lt1376 1.5A, 500Khz Step-Down Switching RegulatorsDocument29 pagesFeatures: Lt1375/Lt1376 1.5A, 500Khz Step-Down Switching RegulatorsSergio MuriloNo ratings yet
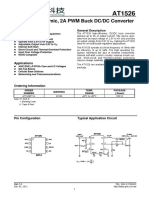
- AT1526 GlobalMixed ModetechnologyDocument2 pagesAT1526 GlobalMixed ModetechnologyFafa MangstabNo ratings yet
- Description Power Range: Analog Servo DriveDocument9 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Features: LT1176/LT1176-5 Step-Down Switching RegulatorDocument8 pagesFeatures: LT1176/LT1176-5 Step-Down Switching RegulatorDreavus HashirobiNo ratings yet
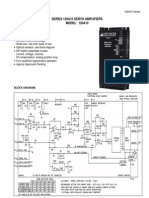
- Series 120A10 Servo Amplifiers MODEL: 120A10: FeaturesDocument5 pagesSeries 120A10 Servo Amplifiers MODEL: 120A10: FeaturesElectromateNo ratings yet
- Series 120A10 Servo Amplifiers MODEL: 120A10: FeaturesDocument5 pagesSeries 120A10 Servo Amplifiers MODEL: 120A10: FeaturesElectromate100% (1)
- Series 120A10 Servo Amplifiers MODEL: 120A10: FeaturesDocument5 pagesSeries 120A10 Servo Amplifiers MODEL: 120A10: FeaturesElectromateNo ratings yet
- Moog Controller N121-132electronicsDocument6 pagesMoog Controller N121-132electronicsnm2007kNo ratings yet
- NCP1396A, NCP1396B Controller, High Performance Resonant Mode, With High and Low Side DriversDocument26 pagesNCP1396A, NCP1396B Controller, High Performance Resonant Mode, With High and Low Side DriversMaria VaccarielloNo ratings yet
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Adjustable Reference Voltage CircuitDocument4 pagesAdjustable Reference Voltage CircuitThieplo BertolaNo ratings yet
- B 15 A 20Document5 pagesB 15 A 20ElectromateNo ratings yet
- PV PanelDocument17 pagesPV PanelMuhammad RiazNo ratings yet
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Depositor Servo CardDocument11 pagesDepositor Servo Cardsyk137No ratings yet
- Fy700 Series TaieDocument9 pagesFy700 Series TaieHưng Phan HữuNo ratings yet
- Service Manual: Power Base-2 & 800CSLDocument36 pagesService Manual: Power Base-2 & 800CSLTonny BahiaNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- 4026 Frequency To Analog Converter Mag & Digital Type: 4026-xx Drop-In Type For Y3 Product DescriptionDocument2 pages4026 Frequency To Analog Converter Mag & Digital Type: 4026-xx Drop-In Type For Y3 Product DescriptionVinod Kumar PatelNo ratings yet
- Ultra Fast FET-Input Operational Amplifier: LH0032 / LH0032CDocument10 pagesUltra Fast FET-Input Operational Amplifier: LH0032 / LH0032CmoiseisinhuNo ratings yet
- Series 120A Servo Amplifiers MODELS: 100A8, 100A6, 120A5: FeaturesDocument7 pagesSeries 120A Servo Amplifiers MODELS: 100A8, 100A6, 120A5: FeaturesElectromateNo ratings yet
- M62301SP, FP: Description Pin Configuration (Top View)Document9 pagesM62301SP, FP: Description Pin Configuration (Top View)roozbehxoxNo ratings yet
- SP481E / SP485E Enhanced Low Power Half-Duplex RS-485 TransceiversDocument12 pagesSP481E / SP485E Enhanced Low Power Half-Duplex RS-485 TransceiversAlejandro PerezNo ratings yet
- 1310 FsDocument12 pages1310 FsMohamed HaddadNo ratings yet
- PM175 QuickStartDocument13 pagesPM175 QuickStartKasirNo ratings yet
- B1601224a-B Sales Literature03051Document4 pagesB1601224a-B Sales Literature03051Barbara SilvaNo ratings yet
- LCD221SD Service ManualDocument41 pagesLCD221SD Service Manual1cvbnmNo ratings yet
- ML4812CPDocument17 pagesML4812CPIntan LianaNo ratings yet
- Pdiol 2008dec24 Supply An 01Document3 pagesPdiol 2008dec24 Supply An 01Roberto De Mesa PNo ratings yet
- 70V - 60W Dmos Audio Amplifier With Mute/St-By: Multipower BCD TechnologyDocument13 pages70V - 60W Dmos Audio Amplifier With Mute/St-By: Multipower BCD TechnologyGokayAkayNo ratings yet
- Features Description: Micropower Inverting DC/DC ConverterDocument6 pagesFeatures Description: Micropower Inverting DC/DC ConverterJosé FariaNo ratings yet
- Proportional Valve Controller-PCB Only-: Electronic ControlsDocument2 pagesProportional Valve Controller-PCB Only-: Electronic ControlsSIVARAMANJAGANATHANNo ratings yet
- D D D D D D D D D: Description/ordering InformationDocument19 pagesD D D D D D D D D: Description/ordering InformationAlfredo ContrerasNo ratings yet
- D D D D D D D D D: Description/ordering InformationDocument19 pagesD D D D D D D D D: Description/ordering InformationPaul VargasNo ratings yet
- Delta Vfd007l21aDocument2 pagesDelta Vfd007l21aCongora PabloNo ratings yet
- Description Power Range: Analog Servo DriveDocument9 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- VDB3722MA Driver With Microstep Série NovaDocument16 pagesVDB3722MA Driver With Microstep Série NovaJefferson Alcantara GomesNo ratings yet
- D D D D D D D D D D D D: For Description of "B" Series CMOS DevicesDocument25 pagesD D D D D D D D D D D D: For Description of "B" Series CMOS DevicesAntonio Carlos Del CastilloNo ratings yet
- Dq2611m ManualDocument7 pagesDq2611m ManualTawanda MandazaNo ratings yet
- HV9120Document11 pagesHV9120dra6anNo ratings yet
- Lhti 001176Document5 pagesLhti 001176Sergio MuriloNo ratings yet
- 25 A 20Document9 pages25 A 20s_barriosNo ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Document21 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Wellison RodriguesNo ratings yet
- Micropower Low Cost Fixed 3.3 V, 5 V, 12 V and Adjustable DC-to-DC ConverterDocument8 pagesMicropower Low Cost Fixed 3.3 V, 5 V, 12 V and Adjustable DC-to-DC ConverterAlejandro DemitiNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Features Description: D D D D D D DDocument18 pagesFeatures Description: D D D D D D DNguyen Phuoc HoNo ratings yet
- CA3450Document8 pagesCA3450MUHAMMAD SISWANTORONo ratings yet
- Microsoft Word - 5011203309-SE09Document1 pageMicrosoft Word - 5011203309-SE09JORGE RODNo ratings yet
- LM6584 TFT-LCD Quad, 13V RRIO High Output Current Operational AmplifierDocument16 pagesLM6584 TFT-LCD Quad, 13V RRIO High Output Current Operational AmplifierKhoa DangNo ratings yet
- LT3743 Demo Board Rev2Document6 pagesLT3743 Demo Board Rev2tosraj7001No ratings yet
- Tda7294 PDFDocument16 pagesTda7294 PDFRoger NunesNo ratings yet
- NF122 202a1electronicsDocument4 pagesNF122 202a1electronicsVeysel GündoğduNo ratings yet
- Servo Valves TechnicalDocument24 pagesServo Valves Technicalobvert100% (2)
- Servo Valves TechnicalDocument24 pagesServo Valves Technicalobvert100% (2)
- SV 1-10/210 Aluminium Servo ValveDocument3 pagesSV 1-10/210 Aluminium Servo ValveVeysel GündoğduNo ratings yet
- Lab ManualDocument38 pagesLab ManualsruharithaNo ratings yet
- Managing A Successful Business ProjectDocument10 pagesManaging A Successful Business ProjectarayvalNo ratings yet
- Feedback AmplifierDocument32 pagesFeedback AmplifierRohit PaulNo ratings yet
- DCS 500 Features Software Application Winder V1: 3ADT069005R0101 Rev ADocument48 pagesDCS 500 Features Software Application Winder V1: 3ADT069005R0101 Rev ALeonardoAcevedoNo ratings yet
- Blohm + Voss Pipe Handling Equipment VES-SD 500-Frame-1 Double Door Elevator 646000-YDocument78 pagesBlohm + Voss Pipe Handling Equipment VES-SD 500-Frame-1 Double Door Elevator 646000-YAlas KHNo ratings yet
- Introduction To The Fundamentals of Control System ECEDocument68 pagesIntroduction To The Fundamentals of Control System ECEEdward FernandezNo ratings yet
- Jesd 65 BDocument19 pagesJesd 65 BrassNo ratings yet
- Cpe 315 Feedback Control System LessonsDocument28 pagesCpe 315 Feedback Control System Lessonskeny amigableNo ratings yet
- Quick Calibration Procedure DHC 100Document4 pagesQuick Calibration Procedure DHC 100oliverttNo ratings yet
- D725Av6 SurgicalCategory Last 180820Document18 pagesD725Av6 SurgicalCategory Last 180820mariavg1994No ratings yet
- Detail Design: Chapter - 5Document22 pagesDetail Design: Chapter - 5Prasheeth KudakandiNo ratings yet
- Flexiforce: Standard Model Ht201Document2 pagesFlexiforce: Standard Model Ht201Landi AdrianNo ratings yet
- Opa 548Document39 pagesOpa 548agrajitNo ratings yet
- With RubricsDocument15 pagesWith Rubrics유웃No ratings yet
- Electronics Interview Questions & AnswersDocument7 pagesElectronics Interview Questions & AnswerssmydyNo ratings yet
- Customer Related ProcessesDocument5 pagesCustomer Related ProcessesMohammed AffrozeNo ratings yet
- 02 Antennas & PropagationDocument719 pages02 Antennas & PropagationAngel CelestialNo ratings yet
- Shift Registers LabViewDocument5 pagesShift Registers LabViewTran Van ThucNo ratings yet
- 150 Smc3 FlexDocument60 pages150 Smc3 FlexSebastian Jofre ValenzuelaNo ratings yet
- Game Mechanics ExamplesDocument17 pagesGame Mechanics ExamplesnevdullNo ratings yet
- Measurement Instrumentation PDFDocument10 pagesMeasurement Instrumentation PDFestraj1954No ratings yet
- Rexroth 4WS2EM 10... XN... - 114 Servo Valve Re29583 - 2007-04Document12 pagesRexroth 4WS2EM 10... XN... - 114 Servo Valve Re29583 - 2007-04Tran Minh SangNo ratings yet
- I48E-EN-01 SigmaServoDrive Datasheet PDFDocument18 pagesI48E-EN-01 SigmaServoDrive Datasheet PDFMihael BlažiNo ratings yet
- Homework Set SP 13 01 SolutionsDocument6 pagesHomework Set SP 13 01 SolutionsJANNo ratings yet
- VLT2800 Quick Guide PDFDocument2 pagesVLT2800 Quick Guide PDFlieldNo ratings yet