You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Math For Business and Finance An Algebraic Approach 1st Edition Slater Solutions ManualDocument36 pagesMath For Business and Finance An Algebraic Approach 1st Edition Slater Solutions Manualwallaceschwartzemefcg100% (27)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Matrix Analysis (Rajendra Bathia - Springer)Document360 pagesMatrix Analysis (Rajendra Bathia - Springer)André Rojas100% (4)
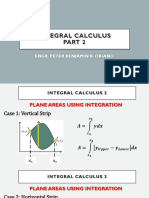
- Integral Calculus Part 2 (Notes With Solutions) - 22231st SemDocument75 pagesIntegral Calculus Part 2 (Notes With Solutions) - 22231st SemKwakle kayoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- This Study Resource Was: Calcul. Final Q. UGRD-MATH6100 Calculus 1Document9 pagesThis Study Resource Was: Calcul. Final Q. UGRD-MATH6100 Calculus 1Simoun Angelo DimabogteNo ratings yet
- Glossary of Automorphic Representations: Modular CharacterDocument5 pagesGlossary of Automorphic Representations: Modular CharacterbabazormNo ratings yet
- Digital Control April 2018Document4 pagesDigital Control April 2018Mourougapragash SubramanianNo ratings yet
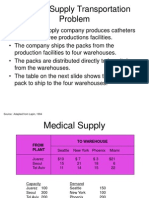
- Medical Supply Transportation ProblemDocument28 pagesMedical Supply Transportation ProblemManish KumarNo ratings yet
- 2015 RSM Olympiad QA G6-7Document4 pages2015 RSM Olympiad QA G6-7VikasNo ratings yet
- Grade 10 Pre AssessmentDocument12 pagesGrade 10 Pre AssessmentjujujutsuNo ratings yet
- Optimal Power Flows: J CarpentierDocument13 pagesOptimal Power Flows: J CarpentiersoumyanitcNo ratings yet
- N2-7 CF Operations 2Document6 pagesN2-7 CF Operations 2Lala JafarovaNo ratings yet
- Algebra - Equations Reducible To Quadratic in Form PDFDocument6 pagesAlgebra - Equations Reducible To Quadratic in Form PDFThesis Group- Coronado Reyes Zapata UST ChENo ratings yet
- Final Instructional MaterialsDocument4 pagesFinal Instructional MaterialsMharaTootNo ratings yet
- Topic 1)Document2 pagesTopic 1)api-63318741No ratings yet
- Chapter 4Document52 pagesChapter 4IzzatManchoNo ratings yet
- Unit 5 PDFDocument22 pagesUnit 5 PDFAnusha KulalNo ratings yet
- VIT Bhopal University: Practical File Fall 2020-2021Document51 pagesVIT Bhopal University: Practical File Fall 2020-2021Kunal ChandraNo ratings yet
- PRELIMINARIES - TrigonometryDocument3 pagesPRELIMINARIES - TrigonometryJoshua 7No ratings yet
- Vector Calculus, Linear Algebra, and Differential Forms: A Unified ApproachDocument4 pagesVector Calculus, Linear Algebra, and Differential Forms: A Unified ApproachDhrubajyoti DasNo ratings yet
- Fitjee Test Paper of MathDocument11 pagesFitjee Test Paper of Mathsudhir_kumar_33No ratings yet
- Normal Bases and Primitive Elements Over Finite FieldsDocument26 pagesNormal Bases and Primitive Elements Over Finite FieldsGiorgos KapetanakisNo ratings yet
- MATH8 Q1 WEEK6 ForuploadDocument34 pagesMATH8 Q1 WEEK6 ForuploadJo Marie DiololaNo ratings yet
- Conway - A Course in Functional AnalysisDocument416 pagesConway - A Course in Functional AnalysisJulian Augusto Casas Herrera100% (1)
- Math1000 Notes PDFDocument89 pagesMath1000 Notes PDFTasnim AhmedNo ratings yet
- Ma 603 LS13Document15 pagesMa 603 LS13rishabh kumarNo ratings yet
- PDE - Most ImportantDocument376 pagesPDE - Most ImportantParvez Ahmed100% (2)
- Heat Kernel Gradient Estimates For The Vicsek Set: Fabrice Baudoin, Li ChenDocument32 pagesHeat Kernel Gradient Estimates For The Vicsek Set: Fabrice Baudoin, Li Chenhitesh902320No ratings yet
- RNS HW PDFDocument2 pagesRNS HW PDFJohn P Dela CruzNo ratings yet
- Addition of IntegersDocument33 pagesAddition of IntegersArman Lombao PradoNo ratings yet
- Calculus FormulasDocument19 pagesCalculus Formulaspjf004No ratings yet