You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Flexural or Bending Test Lab ReportDocument9 pagesFlexural or Bending Test Lab ReportKalKatu MaLam73% (22)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Atlas: Advanced Telemetry Linked Acquisition SystemDocument3 pagesAtlas: Advanced Telemetry Linked Acquisition Systemmkdir911No ratings yet
- The Induction Motor - A Short Circuited Rotating Transformer - A Comparative Analysis C1503021014Document5 pagesThe Induction Motor - A Short Circuited Rotating Transformer - A Comparative Analysis C1503021014mkdir911No ratings yet
- Comparative Analysis of Bilateral Permanent Magnet Linear Synchronous Motors With Different Structures 09130120Document9 pagesComparative Analysis of Bilateral Permanent Magnet Linear Synchronous Motors With Different Structures 09130120mkdir911No ratings yet
- Evaluation of 2004 Toyota Prius Hybrid Electric Drive System Interim ReportDocument43 pagesEvaluation of 2004 Toyota Prius Hybrid Electric Drive System Interim Reportmkdir911No ratings yet
- Photographylife Com Types of PhotographyDocument14 pagesPhotographylife Com Types of Photographymkdir911No ratings yet
- 16 T-IndexDocument5 pages16 T-Indexmkdir911No ratings yet
- Montebello Typeface by Ian Barnard End User License AgreementDocument1 pageMontebello Typeface by Ian Barnard End User License Agreementmkdir911No ratings yet
- YDS Webfont License - Please Read FirstDocument2 pagesYDS Webfont License - Please Read Firstmkdir911No ratings yet
- Morning Light: Tommy Walker Ministries Tommy Walker MinistriesDocument2 pagesMorning Light: Tommy Walker Ministries Tommy Walker Ministriesmkdir911No ratings yet
- Curve Tracer HM 6042: SpecificationsDocument1 pageCurve Tracer HM 6042: Specificationsmkdir911No ratings yet
- Free Speech in The 21 Century: July 3-4 / Virtual ConferenceDocument5 pagesFree Speech in The 21 Century: July 3-4 / Virtual Conferencemkdir911No ratings yet
- Slide 1Document4 pagesSlide 1mkdir911No ratings yet
- APP Contact APP Company: Sales TeamDocument6 pagesAPP Contact APP Company: Sales Teammkdir911No ratings yet
- Zhang 2020 J. Phys. Conf. Ser. 1449 012001Document6 pagesZhang 2020 J. Phys. Conf. Ser. 1449 012001Quang Nguyễn MinhNo ratings yet
- Chapter 7 - Designing For Machining and AssemblyDocument19 pagesChapter 7 - Designing For Machining and AssemblyGarry TaylorNo ratings yet
- Water of Crystallization Lab ReportDocument2 pagesWater of Crystallization Lab ReportjanoyeNo ratings yet
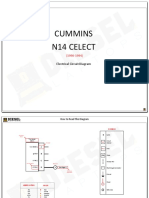
- Cummins N14 Celect: Electrical Circuit DiagramDocument9 pagesCummins N14 Celect: Electrical Circuit DiagramDiego Lira100% (1)
- Q3 General Physics 2 SLHT 4Document16 pagesQ3 General Physics 2 SLHT 4Diane Artiaga100% (1)
- General Navigation Test 2 With AnsDocument19 pagesGeneral Navigation Test 2 With AnsrohitNo ratings yet
- Designing and Simulating EMC Filters With LTspice - Technical ArticlesDocument11 pagesDesigning and Simulating EMC Filters With LTspice - Technical ArticlesHassan HabibNo ratings yet
- Understanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesDocument3 pagesUnderstanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesTommy AsselinNo ratings yet
- Wind LoadDocument34 pagesWind LoadArah Louise ApostolNo ratings yet
- User Manual - WSX ND18Document20 pagesUser Manual - WSX ND18AndrejNo ratings yet
- GATE-2016 (Solution)Document30 pagesGATE-2016 (Solution)RahulNo ratings yet
- Average Single Bond StrengthDocument5 pagesAverage Single Bond StrengthAhmed MohsenNo ratings yet
- Présentation PowerPoint PDFDocument68 pagesPrésentation PowerPoint PDFAssis RochaNo ratings yet
- International Studies Final Exam-BumuloDocument22 pagesInternational Studies Final Exam-BumuloBielan Fabian GrayNo ratings yet
- American Bureau of Shipping: Application For Certification of Container Corner CastingsDocument3 pagesAmerican Bureau of Shipping: Application For Certification of Container Corner CastingsDarioNo ratings yet
- True and False Energy Saving DevicesDocument5 pagesTrue and False Energy Saving DevicesJose ANo ratings yet
- Steel DesignDocument131 pagesSteel DesignAndrea RamirezNo ratings yet
- Knee BiomechanicsDocument20 pagesKnee Biomechanicscrisanto valdezNo ratings yet
- Engine Electrical System General Information SpecificationsDocument55 pagesEngine Electrical System General Information SpecificationsIsaac Galvez EscuderoNo ratings yet
- Mechanic MathematicsDocument3 pagesMechanic MathematicsIsraat PorshiNo ratings yet
- Googlepreview PDFDocument89 pagesGooglepreview PDFFaris FadliNo ratings yet
- Hd4 / Uniair (Withdrawable, Removable, Fixed Versions) Hd4 / R, Hd4 / S, Hd4 / Unimix (Fixed Version)Document10 pagesHd4 / Uniair (Withdrawable, Removable, Fixed Versions) Hd4 / R, Hd4 / S, Hd4 / Unimix (Fixed Version)Raffaele RattiNo ratings yet
- JZBFJZBS Series Semi Hermetic Compressor Condensing Units (Bitzer Compressor)Document9 pagesJZBFJZBS Series Semi Hermetic Compressor Condensing Units (Bitzer Compressor)Coolequipment CeeNo ratings yet
- Base PaperDocument3 pagesBase PaperprakashNo ratings yet
- Railway Short Notes by Shubham SirDocument101 pagesRailway Short Notes by Shubham SirNikita TiwariNo ratings yet
- Elevator Control Valves: EN ISO 9001Document6 pagesElevator Control Valves: EN ISO 9001Jibjab7No ratings yet
- Electrical Data: ML06 ApplicationsDocument5 pagesElectrical Data: ML06 ApplicationsCarlos MeloNo ratings yet
- Oswaal ISC Class 11th Mathematics Mind Map For 2022 ExamDocument28 pagesOswaal ISC Class 11th Mathematics Mind Map For 2022 ExameshnakoriiNo ratings yet
- DifferentiationDocument49 pagesDifferentiationFawziah NabihaNo ratings yet