You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Final Repo HMDocument83 pagesFinal Repo HMkibromgidey12100% (1)
- Transcad User Manual 4 5 PDFDocument640 pagesTranscad User Manual 4 5 PDFDede HermawanNo ratings yet
- Chapter-Five 5.: Pressure VesselDocument13 pagesChapter-Five 5.: Pressure Vesselkibromgidey12No ratings yet
- 2.belt DrivesDocument19 pages2.belt Driveskibromgidey12No ratings yet
- CHAPTER Four: Torque Transmitting Joints: Keys, Spline Joints Pin Joints Interference FitDocument33 pagesCHAPTER Four: Torque Transmitting Joints: Keys, Spline Joints Pin Joints Interference Fitkibromgidey12No ratings yet
- Design of Bevel and Worm Gear: Machine Element IIDocument60 pagesDesign of Bevel and Worm Gear: Machine Element IIkibromgidey12No ratings yet
- Machine Element I: BY Berihu T. and Mebrahtom.GDocument20 pagesMachine Element I: BY Berihu T. and Mebrahtom.Gkibromgidey12No ratings yet
- Spur and Helical Gear DesignDocument45 pagesSpur and Helical Gear Designkibromgidey12No ratings yet
- Tesfaalem Kahsay PDFDocument155 pagesTesfaalem Kahsay PDFkibromgidey12No ratings yet
- Chapter 2-Coupling and ClutchesDocument40 pagesChapter 2-Coupling and Clutcheskibromgidey12No ratings yet
- Chapter 3-BreakDocument37 pagesChapter 3-Breakkibromgidey12No ratings yet
- Chapter 1 - ShaftDocument20 pagesChapter 1 - Shaftkibromgidey12No ratings yet
- Abdulkadir Beshir PDFDocument120 pagesAbdulkadir Beshir PDFkibromgidey12No ratings yet
- Bio Oil PDFDocument129 pagesBio Oil PDFkibromgidey12No ratings yet
- SCIENCE & TECHNOLOGY Design and Development of A Sweet Potato Digging DeviceDocument13 pagesSCIENCE & TECHNOLOGY Design and Development of A Sweet Potato Digging Devicekibromgidey12No ratings yet
- Geostatistics in Petroleum ReservoirDocument202 pagesGeostatistics in Petroleum ReservoirS.Alec Knowle86% (7)
- Comba ODV2-065R18J-G V1Document1 pageComba ODV2-065R18J-G V1RogerNo ratings yet
- The Subject of International LawDocument8 pagesThe Subject of International Lawpriyankkothari123No ratings yet
- 12port Rosenberger - BA G7G7W8W8W8W8X65V 21 - DEDocument2 pages12port Rosenberger - BA G7G7W8W8W8W8X65V 21 - DESarhento KunehoNo ratings yet
- Marketing Mix: ProductDocument3 pagesMarketing Mix: ProductOsama YounusNo ratings yet
- UT - Questions and AnswersDocument238 pagesUT - Questions and AnswersDeepak_Gurjar100% (7)
- The Health Insurance Portability and Accountability Act of 1996 (HIPAA) Privacy and Security RuleDocument24 pagesThe Health Insurance Portability and Accountability Act of 1996 (HIPAA) Privacy and Security RuleTylerDesjarlaisNo ratings yet
- Drying CabinetDocument2 pagesDrying CabinetkamphunkNo ratings yet
- Object Detection and Recognition For A Pick and Place Robot: Rahul Kumar Sanjesh KumarDocument7 pagesObject Detection and Recognition For A Pick and Place Robot: Rahul Kumar Sanjesh KumarLuật NguyễnNo ratings yet
- 172 - Villongco v. YabutDocument2 pages172 - Villongco v. YabutPre Pacionela100% (1)
- A320 TakeoffDocument17 pagesA320 Takeoffpp100% (1)
- Ece 255 Electronic Circuit Analysis and Design Fall 2017: Division 2: Chew TR 1:30PM - 2:45PM ECE 170Document3 pagesEce 255 Electronic Circuit Analysis and Design Fall 2017: Division 2: Chew TR 1:30PM - 2:45PM ECE 170Dildar Khan BhatiNo ratings yet
- Employee Appraisal Form: Company Name Company LogoDocument2 pagesEmployee Appraisal Form: Company Name Company LogoMichael Ivan Sumabat MaglanqueNo ratings yet
- Contracts Forbes 2018 7Document132 pagesContracts Forbes 2018 7JjjjmmmmNo ratings yet
- How To Sell Cyber Security To Your BoardDocument18 pagesHow To Sell Cyber Security To Your BoardLuis SosaNo ratings yet
- Welding Safety: Lesson 1Document9 pagesWelding Safety: Lesson 1cyrelle rose jumentoNo ratings yet
- Form CM GSV MQP SQP Tgi WcaDocument13 pagesForm CM GSV MQP SQP Tgi WcaHasan NudinNo ratings yet
- HVDC Circuit Breakers A Review FutureDocument10 pagesHVDC Circuit Breakers A Review FutureJuly CarranzaNo ratings yet
- Computer ScienceDocument22 pagesComputer ScienceHoorain HameedNo ratings yet
- Book ReviewDocument5 pagesBook ReviewvinishchandraaNo ratings yet
- Transportation Laws (Maritime Commerce)Document64 pagesTransportation Laws (Maritime Commerce)Angel Deiparine100% (1)
- Chapter 2 - Fesibility StudyDocument43 pagesChapter 2 - Fesibility StudyDaniella A. LazaroNo ratings yet
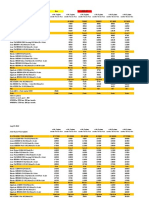
- Ryzen Price 22 08 15Document3 pagesRyzen Price 22 08 15Jhover BernalNo ratings yet
- Resume Kevin WaldronDocument2 pagesResume Kevin WaldronKevin WaldronNo ratings yet
- NOR Logic - WikipediaDocument7 pagesNOR Logic - WikipediaRangeen DuniyaNo ratings yet
- Navy Laser Weapon System DemonstratorDocument53 pagesNavy Laser Weapon System Demonstratorbillg@evilempireNo ratings yet
- ZBrush To Maya Pipeline - DP - TutsDocument12 pagesZBrush To Maya Pipeline - DP - TutsAlok Narekkattuvalappil ReviNo ratings yet
- BCA2 DbmsnotesDocument96 pagesBCA2 DbmsnotesMohd TausifNo ratings yet
- SCDL Organizational Behaviour Paper - 2Document9 pagesSCDL Organizational Behaviour Paper - 2Kattey Spares100% (2)