You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Calculated FieldsDocument7 pagesCalculated FieldssuriyaNo ratings yet
- 1FOR - How To Set Up Ocean Carrier MessagingDocument9 pages1FOR - How To Set Up Ocean Carrier MessagingThabo KholoaneNo ratings yet
- Convener:: Dr. Ashok Shettar Dr. P. G. TewariDocument3 pagesConvener:: Dr. Ashok Shettar Dr. P. G. TewariNikhil Sharma100% (1)
- Rss-Based Localization in Wsns Using Gaussian Mixture Model Via Semidefinite RelaxationDocument4 pagesRss-Based Localization in Wsns Using Gaussian Mixture Model Via Semidefinite RelaxationNikhil SharmaNo ratings yet
- File 1615357221 Brochure FileDocument2 pagesFile 1615357221 Brochure FileNikhil SharmaNo ratings yet
- BSP Assignment 1Document7 pagesBSP Assignment 1Nikhil SharmaNo ratings yet
- Assignment 1 (Nikhil Sharma)Document4 pagesAssignment 1 (Nikhil Sharma)Nikhil SharmaNo ratings yet
- Gupta2021 Article TrustEstimationInPeer-to-peerNDocument10 pagesGupta2021 Article TrustEstimationInPeer-to-peerNNikhil SharmaNo ratings yet
- GPS JammingDocument15 pagesGPS JammingNikhil SharmaNo ratings yet
- Adaptive FilterDocument41 pagesAdaptive FilterNikhil SharmaNo ratings yet
- Introduction of Gps and Storm Detection Using Indian Navigation Satellite SystemDocument47 pagesIntroduction of Gps and Storm Detection Using Indian Navigation Satellite SystemNikhil SharmaNo ratings yet
- FIR Filter ImplementationDocument39 pagesFIR Filter ImplementationNikhil SharmaNo ratings yet
- Comprehensive Digital Forensics Analysis of Smart Home EnvironmentDocument79 pagesComprehensive Digital Forensics Analysis of Smart Home EnvironmentVaishnaviNo ratings yet
- SYNOPSISDocument12 pagesSYNOPSISHitesh sumarwalNo ratings yet
- User's Manual: Admag Axf Series F Fieldbus Communication Type Magnetic FlowmeterDocument109 pagesUser's Manual: Admag Axf Series F Fieldbus Communication Type Magnetic Flowmeterj2pabloNo ratings yet
- Technical Manual Inverter For VentilationDocument16 pagesTechnical Manual Inverter For VentilationSteven VargasNo ratings yet
- Critical Essay On HamletDocument6 pagesCritical Essay On Hamletbufoduhafab3100% (2)
- How To Use Tradingview Thread by MR Chartist Jan 16, 21 From RattibhaDocument51 pagesHow To Use Tradingview Thread by MR Chartist Jan 16, 21 From RattibhaDhiraj RawatNo ratings yet
- BN68-10328D-03 - Um - Utu8500n Utu8000h - Latin - L02 - 200313.0 PDFDocument48 pagesBN68-10328D-03 - Um - Utu8500n Utu8000h - Latin - L02 - 200313.0 PDFAlex fieldNo ratings yet
- HVV ProcessDocument3 pagesHVV Processpratikchouhan2001No ratings yet
- အဓိ႒ာန္ က်င့္စဥ္ ယၾတာ အစီရင္မ်ား PDFDocument1,103 pagesအဓိ႒ာန္ က်င့္စဥ္ ယၾတာ အစီရင္မ်ား PDFHtarwara HtarwaraNo ratings yet
- Second Level - Quadratic Equation - 01 (23062023) - 21433145 - 2023 - 09 - 02 - 09 - 48Document3 pagesSecond Level - Quadratic Equation - 01 (23062023) - 21433145 - 2023 - 09 - 02 - 09 - 48neelesh yadavNo ratings yet
- Instek GSP 827 ManualDocument100 pagesInstek GSP 827 ManualLászló KádárNo ratings yet
- EmTech Q2 QA ReviewerDocument3 pagesEmTech Q2 QA ReviewerKAYE AIRA DE LEONNo ratings yet
- Final Research Paper2Document6 pagesFinal Research Paper2ruchiNo ratings yet
- CCFCDocument156 pagesCCFCfsebamNo ratings yet
- Meta Business SuiteDocument1 pageMeta Business SuitejackNo ratings yet
- Orvibo Product List 2024Document22 pagesOrvibo Product List 2024vikramdulaniNo ratings yet
- BPM Buyers Kit-Samplerfp 150213Document11 pagesBPM Buyers Kit-Samplerfp 150213ibrahem firasNo ratings yet
- Trainee'S Record Book: Technical Education and Skills Development AuthorityDocument10 pagesTrainee'S Record Book: Technical Education and Skills Development AuthorityVirgil Keith Juan PicoNo ratings yet
- 如何推動高速光纖傳輸系統產業化技術 蔡高峰博士20200213Document14 pages如何推動高速光纖傳輸系統產業化技術 蔡高峰博士20200213David TsuiNo ratings yet
- Nature of Roots of Quadratic EquationDocument9 pagesNature of Roots of Quadratic EquationAllyssa RejanoNo ratings yet
- Mobile Access Blade and Capsule Workspace On R80.40 - Demo GuideDocument23 pagesMobile Access Blade and Capsule Workspace On R80.40 - Demo Guidebcalderón_22No ratings yet
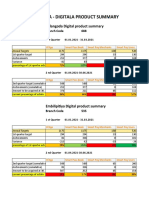
- Embilipitiya Area - Digitala Product SummaryDocument14 pagesEmbilipitiya Area - Digitala Product Summaryrwl s.r.lNo ratings yet
- Model Bank R13: Telnet User SetupDocument9 pagesModel Bank R13: Telnet User SetupViệt NguyễnNo ratings yet
- C#.NET+Material+ +harshaDocument1,583 pagesC#.NET+Material+ +harshaPham Do Cao HiepNo ratings yet
- Infor Solution License Manager Installation and Configuration GuideDocument52 pagesInfor Solution License Manager Installation and Configuration GuidetomactinNo ratings yet
- F4se WhatsnewDocument7 pagesF4se WhatsnewIsabella GregorattiNo ratings yet
- At Dec23 Feb24 Smallest3Document140 pagesAt Dec23 Feb24 Smallest3Paweł GzellaNo ratings yet
- MappingDocument8 pagesMappingLakshit PardeshiNo ratings yet