You might also like
- AVR WorkshopsDocument166 pagesAVR Workshopsrstadmin100% (1)
- SUSE Server 12 AdministrationDocument471 pagesSUSE Server 12 Administration2710mlptNo ratings yet
- Open Box - HP Pavilion Gaming PC (Intel Core i7-10700F1TB HDD256GB SSD16GB RAMGTX 1660 Super) - en Best Buy CanadaDocument1 pageOpen Box - HP Pavilion Gaming PC (Intel Core i7-10700F1TB HDD256GB SSD16GB RAMGTX 1660 Super) - en Best Buy CanadaJohn bandolaNo ratings yet
- Unit 1-Complete Notes With MCQDocument73 pagesUnit 1-Complete Notes With MCQshriman100% (1)
- ESP-WROOM-02: What Is The "Internet of Things"?Document7 pagesESP-WROOM-02: What Is The "Internet of Things"?KOKONo ratings yet
- PCB Unit 1Document77 pagesPCB Unit 1shrimanNo ratings yet
- Boundary Scan LogicDocument26 pagesBoundary Scan LogicAkshay Kumar MNo ratings yet
- Linux PresentationDocument77 pagesLinux PresentationssanagavNo ratings yet
- Security Aspects of Nextgen System (5G) : Rajavelsamy R 10-9-2018Document41 pagesSecurity Aspects of Nextgen System (5G) : Rajavelsamy R 10-9-2018K MadNo ratings yet
- Assignment 1-8 FinalDocument95 pagesAssignment 1-8 Finalshriman100% (5)
- Ch5 Architecture LectureDocument15 pagesCh5 Architecture Lectureapi-3838221No ratings yet
- Round Robin TechniqueDocument33 pagesRound Robin TechniquevedaNo ratings yet
- PES Assignment 3Document6 pagesPES Assignment 3Zia AhmedNo ratings yet
- PDF Paradigma Pengembangan IpteksDocument76 pagesPDF Paradigma Pengembangan IpteksIndri YensiNo ratings yet
- Concurrency: Mutual Exclusion and SynchronizationDocument67 pagesConcurrency: Mutual Exclusion and SynchronizationSreyam DasguptaNo ratings yet
- Advanced Buffer Overflow Technique: Greg HoglundDocument76 pagesAdvanced Buffer Overflow Technique: Greg HoglundNunu CreebowNo ratings yet
- Lecture 17Document13 pagesLecture 17api-3801184No ratings yet
- Advanced Computer Architectures: Exception HandlingDocument17 pagesAdvanced Computer Architectures: Exception Handlingfjuopregheru5734No ratings yet
- Verilab Dvcon Tutorial ADocument138 pagesVerilab Dvcon Tutorial Ahimabindu2305No ratings yet
- SuperscalarDocument38 pagesSuperscalarNusrat Mary ChowdhuryNo ratings yet
- MPMC U5Document81 pagesMPMC U5Kalyan GajareNo ratings yet
- 05 SynchronizationDocument66 pages05 SynchronizationTung Vũ DuyNo ratings yet
- Module 4 - Chapter 6 Process SynchronizationDocument46 pagesModule 4 - Chapter 6 Process SynchronizationBarry AllenNo ratings yet
- Interrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasDocument67 pagesInterrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasprashantvlsiNo ratings yet
- Architectural Support For Operating SystemsDocument57 pagesArchitectural Support For Operating SystemsarreyNo ratings yet
- Process Synchronization or Coordination Seeks To MakeDocument10 pagesProcess Synchronization or Coordination Seeks To MakeKenneth MananganNo ratings yet
- Interrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPDocument54 pagesInterrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPLakshmi SagarNo ratings yet
- Embedded - PPT - 4-5 Unit - DR Monika-EditedDocument87 pagesEmbedded - PPT - 4-5 Unit - DR Monika-EditedProf.Monika JainNo ratings yet
- Rtos Faq VectorDocument56 pagesRtos Faq Vectorprashant goreNo ratings yet
- 08 SpeculationDocument21 pages08 Speculationmohammadrezavali78No ratings yet
- Week 4 - PipeliningDocument44 pagesWeek 4 - Pipeliningdress dressNo ratings yet
- Unit 3 PartDocument15 pagesUnit 3 PartArnav AgarwalNo ratings yet
- EE 445L - Embedded System Design Lab: Interrupts Software Style Guidelines DebuggingDocument44 pagesEE 445L - Embedded System Design Lab: Interrupts Software Style Guidelines DebuggingshivaspyNo ratings yet
- 9.dynamic Scheduling (Score Boarding)Document10 pages9.dynamic Scheduling (Score Boarding)Arvind Krishnaa JNo ratings yet
- Rtosconcepts 1232972644787004 2Document90 pagesRtosconcepts 1232972644787004 2Siva KrishnaNo ratings yet
- IA010: Principles of Programming Languages: 9. ConcurrencyDocument46 pagesIA010: Principles of Programming Languages: 9. ConcurrencyLUCKY SINGHNo ratings yet
- Module3 OSDocument66 pagesModule3 OSabinrj123No ratings yet
- 4 DataProcessing 2019 UPDocument25 pages4 DataProcessing 2019 UPAnnowit RichardNo ratings yet
- Sobia AfifaDocument22 pagesSobia AfifaHNo ratings yet
- 2, I) Real Time OS 1Document16 pages2, I) Real Time OS 1Arjun KelothuNo ratings yet
- ANP - 15. IO MultiplexingDocument11 pagesANP - 15. IO MultiplexingSumanNo ratings yet
- Verification Basics: Jean-Michel ChablozDocument37 pagesVerification Basics: Jean-Michel ChablozKapasi TejasNo ratings yet
- Interrupts Interrupts: GoalsDocument8 pagesInterrupts Interrupts: GoalsSreekanth PagadapalliNo ratings yet
- Dataflow Modeling (D-Sec)Document26 pagesDataflow Modeling (D-Sec)Shachi P GowdaNo ratings yet
- AES Key ExpansitionDocument20 pagesAES Key ExpansitionsureshkumarmtechNo ratings yet
- 8086 Interrupts: Lecturer Csed TietDocument23 pages8086 Interrupts: Lecturer Csed TietsukruthNo ratings yet
- 8086 Interrupts: Lecturer Csed TietDocument23 pages8086 Interrupts: Lecturer Csed TietsukruthNo ratings yet
- 13 Interrupts HandoutsDocument35 pages13 Interrupts HandoutsHakan KaracaNo ratings yet
- ARM ArchitectureDocument24 pagesARM ArchitectureLeena VsNo ratings yet
- Interrupts PDFDocument8 pagesInterrupts PDFFarhan SamsuddinNo ratings yet
- Unit 3Document51 pagesUnit 3Vatsal GhoghariNo ratings yet
- You Got 52 of 55 Correct: ResultsDocument10 pagesYou Got 52 of 55 Correct: ResultsRiyas BinkaderNo ratings yet
- MPMC Unit 5Document62 pagesMPMC Unit 5ganeshNo ratings yet
- Optimization Techniques For Digital VLSI DesignDocument52 pagesOptimization Techniques For Digital VLSI Designshivanand_shettennavNo ratings yet
- OS 03 SyscallsDocument46 pagesOS 03 SyscallsSaras PantulwarNo ratings yet
- A Brief History of Exploitation Techniques and Mitigations On WindowsDocument42 pagesA Brief History of Exploitation Techniques and Mitigations On Windowsankurtyag!No ratings yet
- Verilog Session: General Introduction To Verilog HDL: EE282 Spring Quarter, 2001-2002Document11 pagesVerilog Session: General Introduction To Verilog HDL: EE282 Spring Quarter, 2001-2002anum11No ratings yet
- Interrupts: Reference: Chapter 6, Programming Environment Section 6.4, User's ManualDocument33 pagesInterrupts: Reference: Chapter 6, Programming Environment Section 6.4, User's ManualSiam HasanNo ratings yet
- Modern Virtual Memory Systems: Based On The Material Prepared by Arvind and Krste AsanovicDocument34 pagesModern Virtual Memory Systems: Based On The Material Prepared by Arvind and Krste AsanovicHarshal GalaNo ratings yet
- ECE390 Computer Engineering II: Lecture OutlineDocument14 pagesECE390 Computer Engineering II: Lecture Outlinedeepanshu234No ratings yet
- Module 1: PARALLEL AND DISTRIBUTED COMPUTINGDocument65 pagesModule 1: PARALLEL AND DISTRIBUTED COMPUTINGVandana M 19BCE1763No ratings yet
- Instruction SchedulingDocument17 pagesInstruction Scheduling934916760No ratings yet
- JNCIA JUNOS P1 PassDocument10 pagesJNCIA JUNOS P1 PassRiyas BinkaderNo ratings yet
- Instruction Level Parallelism and Superscalar ProcessorsDocument34 pagesInstruction Level Parallelism and Superscalar ProcessorsJohn Michael MarasiganNo ratings yet
- Instruction Level ParallelismDocument49 pagesInstruction Level ParallelismBijay MishraNo ratings yet
- Relational Database Index Design and the Optimizers: DB2, Oracle, SQL Server, et al.From EverandRelational Database Index Design and the Optimizers: DB2, Oracle, SQL Server, et al.Rating: 5 out of 5 stars5/5 (1)
- UNIT 4 Complete Notes With MCQDocument76 pagesUNIT 4 Complete Notes With MCQshrimanNo ratings yet
- Mces MCQDocument50 pagesMces MCQshrimanNo ratings yet
- NDT UNIT 3-Complete NotesDocument59 pagesNDT UNIT 3-Complete Notesshriman100% (1)
- Unit 2 - Week 1: Assignment 1Document294 pagesUnit 2 - Week 1: Assignment 1shrimanNo ratings yet
- Unit I POWER DIODE-1Document33 pagesUnit I POWER DIODE-1shrimanNo ratings yet
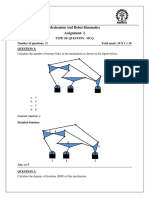
- Course Name: Mechanism and Robot Kinematics Assignment-3Document13 pagesCourse Name: Mechanism and Robot Kinematics Assignment-3shrimanNo ratings yet
- Robot Kinematics W5Document14 pagesRobot Kinematics W5shrimanNo ratings yet
- Mechanism and Robot W6Document14 pagesMechanism and Robot W6shrimanNo ratings yet
- Robot Kinematics W4Document13 pagesRobot Kinematics W4shrimanNo ratings yet
- Week 1 Assignment 1: Assignment Submitted On 2020-09-27, 17:48 ISTDocument8 pagesWeek 1 Assignment 1: Assignment Submitted On 2020-09-27, 17:48 ISTshrimanNo ratings yet
- Robot and Kinematics W1Document10 pagesRobot and Kinematics W1shrimanNo ratings yet
- Robot and Kinematics W2Document8 pagesRobot and Kinematics W2shrimanNo ratings yet
- Assignment 2Document5 pagesAssignment 2shrimanNo ratings yet
- TutorialDocument2 pagesTutorialshrimanNo ratings yet
- PCB Unit 2Document62 pagesPCB Unit 2shrimanNo ratings yet
- BioTime Installation Guide Version 1.3Document13 pagesBioTime Installation Guide Version 1.3Anonymous BzxjnkUNo ratings yet
- Biostar H55 HD Rev. 6.4 (Ih55a-Mhs)Document38 pagesBiostar H55 HD Rev. 6.4 (Ih55a-Mhs)Job GarciaNo ratings yet
- MT6592 Android ScatterDocument6 pagesMT6592 Android ScattererixsNo ratings yet
- SG-Systems Console User GuideDocument86 pagesSG-Systems Console User GuideEL ENCANTONo ratings yet
- Dfc2043 Buku Aktiviti Lembaran Kerja 1Document74 pagesDfc2043 Buku Aktiviti Lembaran Kerja 1fatiniNo ratings yet
- Course 20741 Modulo 4 Lab CDocument4 pagesCourse 20741 Modulo 4 Lab CLarry SaldañaNo ratings yet
- Cisco ASR 9000 Series: Lightspeed+ IntroductionDocument22 pagesCisco ASR 9000 Series: Lightspeed+ IntroductionsarkanyrNo ratings yet
- Creative Zen Firmware UpdateDocument3 pagesCreative Zen Firmware UpdatequaeNo ratings yet
- Compare Performance of 2D and 3D Mesh Architectures in Network-On-ChipDocument5 pagesCompare Performance of 2D and 3D Mesh Architectures in Network-On-ChipJournal of ComputingNo ratings yet
- Addressing ModesDocument39 pagesAddressing ModesKashmai TomarNo ratings yet
- Bosch Releaseletter ConfigManager 5.43.0208Document6 pagesBosch Releaseletter ConfigManager 5.43.0208Victor CalderonNo ratings yet
- lastUIException 63802086644Document1 pagelastUIException 63802086644nao nadsNo ratings yet
- Release Notes AdvaSoft For Windows Version 1.3 4Document38 pagesRelease Notes AdvaSoft For Windows Version 1.3 4BMNo ratings yet
- Maintenance Strategy / Deadlines For SAP GUI For Windows / SAP GUI For JavaDocument10 pagesMaintenance Strategy / Deadlines For SAP GUI For Windows / SAP GUI For JavapalwaiNo ratings yet
- UNIX Commands All 11Document102 pagesUNIX Commands All 11Yash DuddalwarNo ratings yet
- Max DVR ManualDocument120 pagesMax DVR ManualGlennNo ratings yet
- CERC Dell BestDocument35 pagesCERC Dell BestDan FilibiuNo ratings yet
- Blog Ine Com 2010-03-18 Bba Group and Dialer Profiles With PDocument1 pageBlog Ine Com 2010-03-18 Bba Group and Dialer Profiles With PHienNo ratings yet
- Avoid Food WastageDocument3 pagesAvoid Food WastageAkash SolankeNo ratings yet
- APC-January 2021Document118 pagesAPC-January 2021Cristian ParaianuNo ratings yet
- OSI Model - WikipediaDocument14 pagesOSI Model - WikipediaAaryan AshokNo ratings yet
- Computer ArchitectDocument194 pagesComputer Architectksu2006No ratings yet
- DaCom For5 ch11Document35 pagesDaCom For5 ch11SagarNo ratings yet
- Tutorial Batch - Processing (Avidemux) PDFDocument4 pagesTutorial Batch - Processing (Avidemux) PDFSasa MiljkovicNo ratings yet
- (Ebook) Squid Proxy Server PDFDocument86 pages(Ebook) Squid Proxy Server PDFHenry CrespoNo ratings yet
- EXP13 WordDocument2 pagesEXP13 WordPratiksha JadhavNo ratings yet