You might also like
- ModBusTCP DFADocument13 pagesModBusTCP DFAAneet Kumar DuttaNo ratings yet
- Accurate Modeling of The Siemens S7 SCADDocument14 pagesAccurate Modeling of The Siemens S7 SCADNombreNo ratings yet
- MainDocument9 pagesMainrullyhimawan.tmmjNo ratings yet
- EAI Endorsed TransactionsDocument14 pagesEAI Endorsed TransactionsAnooshdini2002No ratings yet
- Accurate Modeling of The Siemens S7 SCADA Protocol For IntrusionDocument15 pagesAccurate Modeling of The Siemens S7 SCADA Protocol For IntrusionVendettaNo ratings yet
- A Retrofit Network Intrusion Detection System ForDocument9 pagesA Retrofit Network Intrusion Detection System ForTrần Tấn LộcNo ratings yet
- SCADA Penetration TestingDocument5 pagesSCADA Penetration TestingAgus SugihartoNo ratings yet
- Comparative Analysis of Traditional SCADDocument3 pagesComparative Analysis of Traditional SCADScada UcvNo ratings yet
- Dynamic Rule Generation For SCADA Intrusion DetectDocument6 pagesDynamic Rule Generation For SCADA Intrusion DetectRichard CrothersNo ratings yet
- What is SCADA? Understanding Supervisory Control and Data AcquisitionDocument8 pagesWhat is SCADA? Understanding Supervisory Control and Data AcquisitionmwbmughalNo ratings yet
- SCADA ArchitechturesDocument9 pagesSCADA ArchitechturesRAHUL DARANDALENo ratings yet
- Exploiting Traf Fic Periodicity in Industrial Control NetworksDocument11 pagesExploiting Traf Fic Periodicity in Industrial Control NetworksPedrito OrangeNo ratings yet
- An Evaluation of Machine Learning Methods To Detect Malicious SCADA Communications PDFDocument6 pagesAn Evaluation of Machine Learning Methods To Detect Malicious SCADA Communications PDFtam nguyenNo ratings yet
- Systems Concepts: SCADA Is TheDocument5 pagesSystems Concepts: SCADA Is TheAfrNo ratings yet
- Systems Concepts: SCADA Is TheDocument5 pagesSystems Concepts: SCADA Is TheAfrNo ratings yet
- SCADADocument5 pagesSCADAapi-3765150100% (1)
- Systems Concepts: SCADA Is TheDocument5 pagesSystems Concepts: SCADA Is ThePHPNo ratings yet
- Systems Concepts: SCADA Is TheDocument5 pagesSystems Concepts: SCADA Is TheAfrNo ratings yet
- SCADADocument24 pagesSCADAMohamed AbubackerNo ratings yet
- Securing SCADA InfrastractureDocument13 pagesSecuring SCADA InfrastractureMiko QuijanoNo ratings yet
- SCADADocument22 pagesSCADAbesjana.memaNo ratings yet
- Industrial Control System Traffic Data Sets For Intrusion Detection ResearchDocument14 pagesIndustrial Control System Traffic Data Sets For Intrusion Detection ResearchPRS 778No ratings yet
- Scada & HmiDocument57 pagesScada & HmiwronghNo ratings yet
- Petri Net Model of Insider Attacks in SCADA SystemsDocument7 pagesPetri Net Model of Insider Attacks in SCADA Systemsimene IBNo ratings yet
- Wang2022 Article AStackedDeepLearningApproachToDocument18 pagesWang2022 Article AStackedDeepLearningApproachTojermNo ratings yet
- Online Ship Control System Using SCADADocument5 pagesOnline Ship Control System Using SCADAPradeep SinghNo ratings yet
- Scada Paper1Document8 pagesScada Paper1Edu EdyNo ratings yet
- Scada: Seminar Report OnDocument12 pagesScada: Seminar Report OnjithinNo ratings yet
- Scheme To Secure Communication of SCADA Master Station and Remote HMI's Through Smart PhonesDocument10 pagesScheme To Secure Communication of SCADA Master Station and Remote HMI's Through Smart PhonesAdi FangNo ratings yet
- Rita Secure Communication Protocol: Application To ScadaDocument12 pagesRita Secure Communication Protocol: Application To ScadaCS & ITNo ratings yet
- Scada Seminar ReportDocument20 pagesScada Seminar ReportPrakash Kumar76% (17)
- Tsang SCADA AttacksDocument23 pagesTsang SCADA Attacksmanu2020No ratings yet
- Scada Report of Seminar by Electronis and Electrical DepartmentDocument22 pagesScada Report of Seminar by Electronis and Electrical DepartmentatharNo ratings yet
- SCADA System Architecture, Types and ApplicationsDocument21 pagesSCADA System Architecture, Types and ApplicationsVidya SisaleNo ratings yet
- Apply Machine Learning Techniques To Detect Malicious Network Traffic in Cloud ComputingDocument24 pagesApply Machine Learning Techniques To Detect Malicious Network Traffic in Cloud ComputingMd.Mostafiz Ul IslamNo ratings yet
- An Introduction To SCADA SystemsDocument6 pagesAn Introduction To SCADA Systemsibrahim shahNo ratings yet
- PLC m5Document14 pagesPLC m5Goutham KNo ratings yet
- Research Paper On ScadaDocument7 pagesResearch Paper On ScadamkmanojdevilNo ratings yet
- IDS Using SDN: Intrusion Detection SystemsDocument8 pagesIDS Using SDN: Intrusion Detection SystemsMuhammad JavedNo ratings yet
- Iiot and Industrial Control System (Ics) Security: Palo Alto Networks and Nozomi NetworksDocument4 pagesIiot and Industrial Control System (Ics) Security: Palo Alto Networks and Nozomi Networksantonio hhNo ratings yet
- SCADA - Supervisory Control and Data AcquisitionDocument23 pagesSCADA - Supervisory Control and Data AcquisitionSushant KambojNo ratings yet
- SCADA Seminar Report InsightsDocument34 pagesSCADA Seminar Report InsightsAshutosh Maurya100% (2)
- SCADA Security: Why Is It So Hard?: Amol SarwateDocument9 pagesSCADA Security: Why Is It So Hard?: Amol SarwateTroy TorresNo ratings yet
- ScadaDocument13 pagesScadamdayyub40% (5)
- UntitledDocument47 pagesUntitledArnab GhoshNo ratings yet
- Scada ReportDocument26 pagesScada Reportkiswah computers100% (1)
- 2016-ccs-powerDocument13 pages2016-ccs-powerfofoma5593No ratings yet
- An Introduction To SCADA For Electrical EngineersDocument168 pagesAn Introduction To SCADA For Electrical Engineersmita100% (2)
- Agent Based Efficient Anomaly Intrusion Detection System in Ad Hoc NetworksDocument74 pagesAgent Based Efficient Anomaly Intrusion Detection System in Ad Hoc NetworksdineshshaNo ratings yet
- SCADADocument22 pagesSCADAAqib SiddiquiNo ratings yet
- OwezarskiDocument13 pagesOwezarskifarhanNo ratings yet
- On The Use of Open Source Firewalls in IDocument12 pagesOn The Use of Open Source Firewalls in Ipedrovar83No ratings yet
- Scada PDFDocument7 pagesScada PDFTakudzwa MpofuNo ratings yet
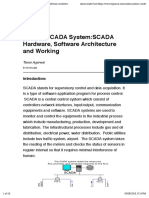
- What Is SCADA System-SCADA Hardware, Software Architecture and WorkingDocument10 pagesWhat Is SCADA System-SCADA Hardware, Software Architecture and WorkingMohd Ismail YusofNo ratings yet
- Hierarchy of Process ControlDocument13 pagesHierarchy of Process Controlanon_406564148No ratings yet
- Toward Modeling Alarm Handling in SCADA PDFDocument8 pagesToward Modeling Alarm Handling in SCADA PDFKrysthian Faria MartinsNo ratings yet
- Enhancing SCADA System SecurityDocument4 pagesEnhancing SCADA System SecurityAdil KhanNo ratings yet
- Model Driven Development for Embedded Software: Application to Communications for Drone SwarmFrom EverandModel Driven Development for Embedded Software: Application to Communications for Drone SwarmNo ratings yet
- Interface Cabling Options For 9910-P13 & P14 Ups: I5-Iseries and P5-Pseries and WindowsDocument11 pagesInterface Cabling Options For 9910-P13 & P14 Ups: I5-Iseries and P5-Pseries and Windowsalibob78No ratings yet
- Fluid Property Calculations Program: (For The ROC809) User ManualDocument28 pagesFluid Property Calculations Program: (For The ROC809) User ManualsaoNo ratings yet
- Data SheetDocument9 pagesData Sheetvanhuong87No ratings yet
- Fisher ROC Ethernet Driver Help: © 2015 Kepware, IncDocument57 pagesFisher ROC Ethernet Driver Help: © 2015 Kepware, Incalibob78No ratings yet
- Slua 144Document21 pagesSlua 144sanithslNo ratings yet
- RM 135Document8 pagesRM 135pvirgosharmaNo ratings yet
- TS®54 TDR-4107295BDocument6 pagesTS®54 TDR-4107295Balibob78No ratings yet
- 20160617172420972Document2 pages20160617172420972alibob78No ratings yet
- FST User ManualDocument100 pagesFST User ManualKamal ZulfaqqaNo ratings yet
- 6908377Document25 pages6908377alibob78No ratings yet
- HedhdsfgdsfhgDocument1 pageHedhdsfgdsfhgalibob78No ratings yet
- OverviewofstandardcryptographicalgorithmsDocument5 pagesOverviewofstandardcryptographicalgorithmsalibob78No ratings yet
- IEC 61511 Implementation - The Execution ChallengeDocument7 pagesIEC 61511 Implementation - The Execution Challengehmatora72_905124701No ratings yet
- Guide To Industrial Control Systems (ICS) Security: Recommendations of The National Institute of Standards and TechnologyDocument157 pagesGuide To Industrial Control Systems (ICS) Security: Recommendations of The National Institute of Standards and Technologyalibob78No ratings yet
- Mks Toolkit For Interoperability Mks SoftwareDocument2 pagesMks Toolkit For Interoperability Mks Softwarealibob78No ratings yet
- Iso 5167 1 1991 Amd 1 1998 FR PDFDocument8 pagesIso 5167 1 1991 Amd 1 1998 FR PDFsaoNo ratings yet
- SdgyDocument4 pagesSdgyalibob78No ratings yet
- VRGDocument2 pagesVRGalibob78No ratings yet
- Downloads Drivers Ds800 Development Suite Software 4 1 Ds800 en 133388Document2 pagesDownloads Drivers Ds800 Development Suite Software 4 1 Ds800 en 133388saoNo ratings yet
- VRGDocument2 pagesVRGalibob78No ratings yet
- Serial Programming - IP Over Serial Connections - Wikibooks, Open Books For An Open WorldDocument35 pagesSerial Programming - IP Over Serial Connections - Wikibooks, Open Books For An Open Worldalibob78No ratings yet
- Control System Administrator Curriculum Path Flyer en 1263556Document1 pageControl System Administrator Curriculum Path Flyer en 1263556alibob78No ratings yet
- NPPDocument2 pagesNPPalibob78No ratings yet
- GALAXY-S5 - G900T-Full Factory Rom Firmware 4.4.2Document1 pageGALAXY-S5 - G900T-Full Factory Rom Firmware 4.4.2alibob78No ratings yet
- Downgrade Rights For Microsoft Commercial Licensing, OEM, and Full-Package Product LicensesDocument7 pagesDowngrade Rights For Microsoft Commercial Licensing, OEM, and Full-Package Product Licenses-'Rudy Aja Cakep'-No ratings yet
- Free Proxy ListDocument1 pageFree Proxy Listalibob78No ratings yet
- Maximize Investments with DeltaV DCS CoursesDocument1 pageMaximize Investments with DeltaV DCS CoursesJitendra AnneNo ratings yet
- ISa GRAFDocument19 pagesISa GRAFalibob78No ratings yet
- Data SheetDocument19 pagesData SheetTomislav FilipovićNo ratings yet
- Test Questions | Recruitment Test | AFGT02Document26 pagesTest Questions | Recruitment Test | AFGT02Ammar Farooq Khan80% (5)
- Garmin GTX 330 ManualDocument6 pagesGarmin GTX 330 Manualdannyells_danielsNo ratings yet
- Document Management Plan TemplateDocument22 pagesDocument Management Plan TemplateAdekunle Akure100% (2)
- Universiti Teknologi Malaysia: Joei Ong Suk MeiDocument19 pagesUniversiti Teknologi Malaysia: Joei Ong Suk MeiJoey OngNo ratings yet
- AWS Course OutlineDocument5 pagesAWS Course Outlineshahebaz sayedNo ratings yet
- ProVision Plus 2 - 4 - 0 Installation & Administration Guide - May2019Document80 pagesProVision Plus 2 - 4 - 0 Installation & Administration Guide - May2019nea317No ratings yet
- Core Java Cheat SheetDocument2 pagesCore Java Cheat SheetSri Priya P KulkarniNo ratings yet
- Using VPN With ZBFDocument10 pagesUsing VPN With ZBFKamran ShakilNo ratings yet
- Fundamental of Computer Science (FCS)Document104 pagesFundamental of Computer Science (FCS)Abdulhaq Sadiqi100% (1)
- Flow-Based Detection and Mitigation of Low-Rate DDOS Attack in SDN Environment Using Machine Learning TechniquesDocument502 pagesFlow-Based Detection and Mitigation of Low-Rate DDOS Attack in SDN Environment Using Machine Learning TechniquesMiax PandeyNo ratings yet
- Sojib VaiDocument2 pagesSojib VaiPeash Mredha80% (5)
- 5 Chapters AssignmentsDocument30 pages5 Chapters AssignmentsMuhammad MudassarNo ratings yet
- Multi-parameter modules monitor vital signsDocument2 pagesMulti-parameter modules monitor vital signsEng.yahya tawiliNo ratings yet
- Malware Detection Using Statistical Analysys Byte Level File ContentDocument9 pagesMalware Detection Using Statistical Analysys Byte Level File Contentricksant2003No ratings yet
- SystemaudiomanagerDocument10 pagesSystemaudiomanagerTheMrAndreiNo ratings yet
- PP Master Data Version 002Document34 pagesPP Master Data Version 002pranitNo ratings yet
- Encoder Detector IC for Optical EncodersDocument4 pagesEncoder Detector IC for Optical Encoderstabassam7801No ratings yet
- Courier Charges CalculatorDocument7 pagesCourier Charges Calculatoramrhkmh100% (1)
- UNDP NP ESP Electoral-Atlas-Nepal PDFDocument194 pagesUNDP NP ESP Electoral-Atlas-Nepal PDFsagarmohan123No ratings yet
- Module 45: Creating Assignment Rules: Siebel 8.0 EssentialsDocument28 pagesModule 45: Creating Assignment Rules: Siebel 8.0 Essentialskomarovs33No ratings yet
- Piperack Quantity EstimationsDocument7 pagesPiperack Quantity EstimationsLandon MitchellNo ratings yet
- Pagepro 1480MF SMDocument127 pagesPagepro 1480MF SMNorel AndreiNo ratings yet
- Pellet Stove Temperature Controller EasyTech.Full ManualDocument12 pagesPellet Stove Temperature Controller EasyTech.Full ManualshufuckNo ratings yet
- PF 01 Hello WorldDocument38 pagesPF 01 Hello WorldVan Dan HeucelNo ratings yet
- Forum: Knowledge: Yesterday and TodayDocument3 pagesForum: Knowledge: Yesterday and TodayWilkin Felisilda SimoNo ratings yet
- Structural Equation ModelingDocument17 pagesStructural Equation ModelingAdina CristeaNo ratings yet
- Essentials of Project Management PhilosophyDocument15 pagesEssentials of Project Management PhilosophyGihan Sampath100% (4)
- AC Variable Speed Drive: Advanced Technical ManualDocument69 pagesAC Variable Speed Drive: Advanced Technical ManualRugart LagemannNo ratings yet
- The Research and Implementation of Anti-Theft Monitoring Alarm System Based On MTKDocument3 pagesThe Research and Implementation of Anti-Theft Monitoring Alarm System Based On MTKMaxbuub AxmedNo ratings yet