You might also like
- Introduction to The Lifting Scheme for Wavelet TransformsDocument15 pagesIntroduction to The Lifting Scheme for Wavelet TransformssreenathgopalNo ratings yet
- 1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto FDocument5 pages1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto F曾燒餅No ratings yet
- ECE411 - 4c - The Z-Transform - Problem Set 1Document2 pagesECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezNo ratings yet
- Place Value Assessment InterviewDocument7 pagesPlace Value Assessment Interviewapi-335482580No ratings yet
- BCS - 4 - Reduction of Multiple SubsystemsDocument24 pagesBCS - 4 - Reduction of Multiple Subsystemsandik yuliantoNo ratings yet
- Mason's RuleDocument4 pagesMason's RuleMarvin GarcíaNo ratings yet
- Transfer System 101Document14 pagesTransfer System 101Hermione Calliope ChanNo ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- Chapter 2 - Reduction of Multiple SystemDocument46 pagesChapter 2 - Reduction of Multiple SystemHaqeemee HusseinNo ratings yet
- Lecture 7 & 8 (Stability Analysis)Document35 pagesLecture 7 & 8 (Stability Analysis)muhammad hamzaNo ratings yet
- Stability Analysis For Control SystemsDocument36 pagesStability Analysis For Control SystemsSARTHAK BAPATNo ratings yet
- Chapter 2 - Reduction of Multiple SystemDocument22 pagesChapter 2 - Reduction of Multiple SystemMustafa ManapNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- CSE Lecture 5-UWE PDFDocument9 pagesCSE Lecture 5-UWE PDFKame KamehaNo ratings yet
- C-Transient ResponseDocument17 pagesC-Transient ResponseAnanthan SrijithNo ratings yet
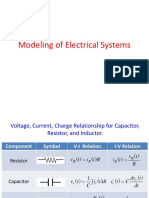
- Modeling of Electrical SystemsDocument51 pagesModeling of Electrical SystemsCheems PandeyNo ratings yet
- Unit3 Iir Design Lecture NotesDocument24 pagesUnit3 Iir Design Lecture NotesramuamtNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- REGULATION AND CONTROL MATHEMATICAL MODELINGDocument68 pagesREGULATION AND CONTROL MATHEMATICAL MODELINGhermelaNo ratings yet
- 01 - Signal Flow GraphDocument31 pages01 - Signal Flow GraphShadowツNo ratings yet
- Fundamentals of Linear Stability AnalysisDocument35 pagesFundamentals of Linear Stability Analysisfoxbat81No ratings yet
- A Tutorial For Electronic Circuit ...Document5 pagesA Tutorial For Electronic Circuit ...Chito June TumolvaNo ratings yet
- GATE ME 1991 exam discussion and solutionsDocument13 pagesGATE ME 1991 exam discussion and solutionsShaik FarooqNo ratings yet
- IIR FILTER DESIGN TECHNIQUESDocument17 pagesIIR FILTER DESIGN TECHNIQUESBelachew AyaliewNo ratings yet
- B3 IirDocument39 pagesB3 Iirmaria reverteNo ratings yet
- Block Diagram Simplification TechniquesDocument22 pagesBlock Diagram Simplification TechniquesAhmed SaidNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Mathematical Modeling 2Document56 pagesMathematical Modeling 2hermelaNo ratings yet
- ME 1991 Unsolved PDFDocument13 pagesME 1991 Unsolved PDFNitesh K. YedatiNo ratings yet
- CompensatorsDocument4 pagesCompensatorsanubhvtiwaryNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Ps 5Document4 pagesPs 5Andres Nicolas ZartaNo ratings yet
- Electric Circuits ECSE-2010 ECSE 2010: Today and Next ClassesDocument5 pagesElectric Circuits ECSE-2010 ECSE 2010: Today and Next Classeschristian9082No ratings yet
- Hikma College Automatic Control Systems LectureDocument17 pagesHikma College Automatic Control Systems LectureOsama AlzakyNo ratings yet
- Formulario Mate IIDocument5 pagesFormulario Mate IIÁngel Flores HernándezNo ratings yet
- EET302 M2-Ktunotes - inDocument33 pagesEET302 M2-Ktunotes - inAkhilaNo ratings yet
- LPVcourse PDFDocument73 pagesLPVcourse PDFYaye RodriguezNo ratings yet
- Ece411 - 3 - Dt-Lti SystemsDocument23 pagesEce411 - 3 - Dt-Lti SystemsMartine JimenezNo ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- Automatic Flight Control State Space ModelsDocument73 pagesAutomatic Flight Control State Space ModelsNumkang KangNo ratings yet
- EE253 Control SystemsDocument5 pagesEE253 Control SystemsmandavillinagavenkatasriNo ratings yet
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoNo ratings yet
- Hanani Abd Wahab BDA 3073 16 July 2008Document34 pagesHanani Abd Wahab BDA 3073 16 July 2008Hafzal GaniNo ratings yet
- Digital and Non-Linear Control: Mathematical Modelling of Electrical SystemsDocument19 pagesDigital and Non-Linear Control: Mathematical Modelling of Electrical SystemsRavi BankNo ratings yet
- Lecture Notes 3:: Transfer Functions, Poles and ZerosDocument7 pagesLecture Notes 3:: Transfer Functions, Poles and ZerosPreetham SaigalNo ratings yet
- Digital Signal Processing Filters and Z-TransformDocument38 pagesDigital Signal Processing Filters and Z-TransformzaidNo ratings yet
- ProblemSheet - Chapter 5Document3 pagesProblemSheet - Chapter 5Bhen CalugayNo ratings yet
- L25 - Datapath Design - p1Document46 pagesL25 - Datapath Design - p1Shanawar AliNo ratings yet
- Water System Optimization Concepts and MethodsDocument24 pagesWater System Optimization Concepts and MethodsKeyurNo ratings yet
- Feedback AmpDocument76 pagesFeedback AmpBayu AjiNo ratings yet
- D - Stability AnalysisDocument5 pagesD - Stability AnalysisAnanthan SrijithNo ratings yet
- Outline: - Signal Flow Graph Notation. - Signal Flow Graph From Block Diagram. - Mason's Rule. - Transfer FunctionDocument5 pagesOutline: - Signal Flow Graph Notation. - Signal Flow Graph From Block Diagram. - Mason's Rule. - Transfer FunctionG MunhuNo ratings yet
- 6.003 Homework 3: ProblemsDocument4 pages6.003 Homework 3: ProblemsIsrael SmithNo ratings yet
- Automatic Control Systems Lec.4Document35 pagesAutomatic Control Systems Lec.4Mohamed ElsoodyNo ratings yet
- Mathematics Extension 2: 9th OctoberDocument14 pagesMathematics Extension 2: 9th OctoberAndrew TaNo ratings yet
- 446-08 Block Diagrams (N) - HandoutDocument7 pages446-08 Block Diagrams (N) - HandoutFrancisco HurtadoNo ratings yet
- Brief Introduction To Logic Simulation: Kinds of Logic SimulatorsDocument14 pagesBrief Introduction To Logic Simulation: Kinds of Logic SimulatorsPanku RangareeNo ratings yet
- Describing Function Analysis for Limit CyclesDocument101 pagesDescribing Function Analysis for Limit CyclesMeet VasaniNo ratings yet
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Laplace Transform: Fundamental of Control System Andik Yulianto, ST., MTDocument27 pagesLaplace Transform: Fundamental of Control System Andik Yulianto, ST., MTandik yuliantoNo ratings yet
- Experiment 1 - Basic ElectronicsDocument6 pagesExperiment 1 - Basic Electronicsandik yuliantoNo ratings yet
- Experiment 1 - Basic ElectronicsDocument6 pagesExperiment 1 - Basic Electronicsandik yuliantoNo ratings yet
- Experiment 1 - Basic ElectronicsDocument6 pagesExperiment 1 - Basic Electronicsandik yuliantoNo ratings yet
- Reduction of Multiple Control SubsystemsDocument21 pagesReduction of Multiple Control Subsystemsandik yuliantoNo ratings yet
- LCD HD44780U (LCD-II) PC 1601-F + PC 0802-A - DatasheetDocument60 pagesLCD HD44780U (LCD-II) PC 1601-F + PC 0802-A - DatasheetLudwig SchmidtNo ratings yet
- Robot Soccer (RODACOM)Document5 pagesRobot Soccer (RODACOM)andik yuliantoNo ratings yet
- A Review of Litterature Gender Differences in Mathematical Problem Solving PatternDocument17 pagesA Review of Litterature Gender Differences in Mathematical Problem Solving PatternZaidComunicationNo ratings yet
- Introduction To Mellin Transforms Part - 01Document5 pagesIntroduction To Mellin Transforms Part - 01Shivam SharmaNo ratings yet
- Gensler's Star TestDocument10 pagesGensler's Star Testchmurka1No ratings yet
- The Fabric of Space-Time ExplainedDocument9 pagesThe Fabric of Space-Time ExplainedSoumyojit DeyNo ratings yet
- FM-USTP-ACAD-08 Table of Specification (MMW - MIDTERM EXAM)Document2 pagesFM-USTP-ACAD-08 Table of Specification (MMW - MIDTERM EXAM)Cheryll PagalNo ratings yet
- Mca Sem 1 DMSDocument3 pagesMca Sem 1 DMSAbhijeet SinghNo ratings yet
- Detailed Lesson Plan - 074702Document5 pagesDetailed Lesson Plan - 074702Gohan Dave AgmataNo ratings yet
- BA 424 Chapter 1 NotesDocument6 pagesBA 424 Chapter 1 Notesel jiNo ratings yet
- Engineering Mathematics-I MCQ Question BankDocument94 pagesEngineering Mathematics-I MCQ Question BankKIRUTHIKA V UCS20443No ratings yet
- Waim ZainalDocument135 pagesWaim ZainalZoey DutcheeNo ratings yet
- Blood, Sweat & TearsDocument6 pagesBlood, Sweat & TearsSapphire SteeleNo ratings yet
- KMurphy PDFDocument20 pagesKMurphy PDFHamid FarhanNo ratings yet
- Lesson 2. Mathematics Curriculum in The Intermediate Grades ObjectiveDocument6 pagesLesson 2. Mathematics Curriculum in The Intermediate Grades ObjectiveAdriane TingzonNo ratings yet
- Conics MCQ TestDocument4 pagesConics MCQ TestTaimoor DogarNo ratings yet
- Math1 BasicCounting 2021.9376ad12Document12 pagesMath1 BasicCounting 2021.9376ad12Jiho JunNo ratings yet
- Calculate compound interest amounts and time periodsDocument5 pagesCalculate compound interest amounts and time periodsMiguel MerandillaNo ratings yet
- Math IA DraftDocument12 pagesMath IA DraftShantanu JareNo ratings yet
- 10.1515 - Spma 2020 0125Document5 pages10.1515 - Spma 2020 0125Leng RyanNo ratings yet
- Ambiguity of MathematicsDocument10 pagesAmbiguity of MathematicsDeimante BlikertaiteNo ratings yet
- Solving Quadratic EquationsDocument4 pagesSolving Quadratic EquationsHelen MylonaNo ratings yet
- Analysis of A Mathematical Problem-Solving Test On Speed and StudDocument15 pagesAnalysis of A Mathematical Problem-Solving Test On Speed and StudWiandi AfrizahNo ratings yet
- Differential and Integral Calculus - N Piskunov PDFDocument895 pagesDifferential and Integral Calculus - N Piskunov PDFallstarsamelo87% (30)
- Test PaperDocument16 pagesTest Papersudhir_kumar_33No ratings yet
- Topic 4 Transportation and Assignment Models - Chapter 9Document64 pagesTopic 4 Transportation and Assignment Models - Chapter 9Hong Zaii50% (2)
- OdeDocument387 pagesOdenikobelookNo ratings yet
- Inferring The Mesoscale Structure of Layered, Edge-Valued, and Time-Varying NetworksDocument15 pagesInferring The Mesoscale Structure of Layered, Edge-Valued, and Time-Varying NetworksDolly DoloresNo ratings yet
- DLL - Mathematics 6 - Q4 - W7Document7 pagesDLL - Mathematics 6 - Q4 - W7Arnel LopezNo ratings yet
- Term-Paper of Formal Languages and Automation Theory: Faisal Hussian ShahDocument8 pagesTerm-Paper of Formal Languages and Automation Theory: Faisal Hussian ShahREAL worldNo ratings yet
- 2 - Pseudocode With IF-ELSEDocument13 pages2 - Pseudocode With IF-ELSEabdulrehman liaqatNo ratings yet