You might also like
- Binomial ExpansionDocument18 pagesBinomial ExpansionMathathlete100% (1)
- CS Dec 17Document3 pagesCS Dec 17SAURABH BHISENo ratings yet
- Control System - 1 PYQsDocument7 pagesControl System - 1 PYQsAbhishekNo ratings yet
- Paper.I &: Chemistry.2OisDocument32 pagesPaper.I &: Chemistry.2OisMeenakshi AnandNo ratings yet
- Name 5O Iwt T6H: Ryio) - RDocument6 pagesName 5O Iwt T6H: Ryio) - RMuhammad YousufNo ratings yet
- SaS Topic3 Slides 1 8Document8 pagesSaS Topic3 Slides 1 8Dinko BešlagićNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Computational Techniques in Civil Engineering IOE BCE Past Questions CollectionDocument32 pagesComputational Techniques in Civil Engineering IOE BCE Past Questions CollectionFlush BinNo ratings yet
- Differential EquationDocument2 pagesDifferential EquationumarNo ratings yet
- Sample Paper Class 9Document17 pagesSample Paper Class 9purnimadas4595No ratings yet
- Lecture 7 & 8 (Stability Analysis)Document35 pagesLecture 7 & 8 (Stability Analysis)muhammad hamzaNo ratings yet
- Ec9203-Signals and Systems: 2. Determine Whether The Given System Is Causal or Not. JustifyDocument3 pagesEc9203-Signals and Systems: 2. Determine Whether The Given System Is Causal or Not. JustifyToonNo ratings yet
- B.tech - Sem 6 Me April-Jun-2018 CseDocument2 pagesB.tech - Sem 6 Me April-Jun-2018 Csepandyamahesh118No ratings yet
- Computer Test Paper For Icse 10Document3 pagesComputer Test Paper For Icse 10AK WARRIOR GAMINGNo ratings yet
- Stability Analysis For Control SystemsDocument36 pagesStability Analysis For Control SystemsSARTHAK BAPATNo ratings yet
- CSDocument24 pagesCSelangocsNo ratings yet
- Design: of AlgorithmsDocument3 pagesDesign: of Algorithmspankaja_ssu3506No ratings yet
- Xaviers 11sem1 Engmed Aug2014 PhyDocument3 pagesXaviers 11sem1 Engmed Aug2014 PhyRabbani SumraNo ratings yet
- Lab 2 - Root Locus Analysis (202312)Document2 pagesLab 2 - Root Locus Analysis (202312)Azlina RamliNo ratings yet
- Digital Control Part 2Document18 pagesDigital Control Part 2Zhraa NorNo ratings yet
- Laplas SheetDocument1 pageLaplas SheetJefara 01No ratings yet
- Dec08 Maths 1Document2 pagesDec08 Maths 1erparshotamsharmaNo ratings yet
- Electronics Telecommunjcation Engineering Paper - Ii: IO B J) - 11104Document15 pagesElectronics Telecommunjcation Engineering Paper - Ii: IO B J) - 11104Brawner BrynmorNo ratings yet
- LinearDocument2 pagesLinearYee Jing TanNo ratings yet
- Previous Paper HPSC AE Civil Civil Engineering Paper I Short Answer TypeDocument14 pagesPrevious Paper HPSC AE Civil Civil Engineering Paper I Short Answer TypeVivek Thakur SujanianNo ratings yet
- Advanced Control TheoryDocument4 pagesAdvanced Control TheoryAmit BansodNo ratings yet
- Raffles Junior College Jc1 Promotion Examination 2008Document10 pagesRaffles Junior College Jc1 Promotion Examination 2008Mathathlete100% (1)
- 'Ffi W Ffi Ffi: Sectors Trigonometric Functions Trigonometric WithDocument25 pages'Ffi W Ffi Ffi: Sectors Trigonometric Functions Trigonometric WithMin KangNo ratings yet
- SS Dec 16Document4 pagesSS Dec 16SAURABH BHISENo ratings yet
- TPJC Promo 2008Document11 pagesTPJC Promo 2008MathathleteNo ratings yet
- Control System 1Document31 pagesControl System 1Rakibul Hasan RakibNo ratings yet
- Img 20240131 0001Document37 pagesImg 20240131 0001yashvichetanranaNo ratings yet
- Coe Sem 5 End Sem 2008Document10 pagesCoe Sem 5 End Sem 2008ashwaniNo ratings yet
- Cat Final Book Module 1Document153 pagesCat Final Book Module 1yashvichetanranaNo ratings yet
- CH 29 SolutionsDocument7 pagesCH 29 SolutionsAlfira Luthfi Nur Fatimah 7ANo ratings yet
- Mason's RuleDocument4 pagesMason's RuleMarvin GarcíaNo ratings yet
- DSD Midsem PapersDocument14 pagesDSD Midsem PapersRanveerNo ratings yet
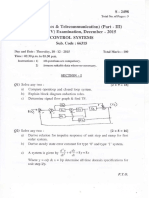
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- Dig Sheet 6Document4 pagesDig Sheet 6Ahmed AbdeazizNo ratings yet
- Dcs 2019 Questions PaperDocument14 pagesDcs 2019 Questions PaperDASHARATH VISHAWAKARMANo ratings yet
- Winter Ap Quiz One AnswersDocument3 pagesWinter Ap Quiz One AnswersteachopensourceNo ratings yet
- Final HomeworkDocument1 pageFinal HomeworkPro HackedNo ratings yet
- ControlDocument55 pagesControlHuyThaiNo ratings yet
- Math 1 Test 2Document24 pagesMath 1 Test 2Samah HamdanNo ratings yet
- S6 Ei DSP May2014Document3 pagesS6 Ei DSP May2014shilpa.1595No ratings yet
- Eet305 Signals and Systems December 2021Document4 pagesEet305 Signals and Systems December 2021HarijaNo ratings yet
- Eet305 Signals and Systems, December 2022 - 2Document4 pagesEet305 Signals and Systems, December 2022 - 2depressedmeddNo ratings yet
- Assignment 2024Document18 pagesAssignment 2024tom.pallgenNo ratings yet
- Florida Atlantic University: Department of PhysicsDocument18 pagesFlorida Atlantic University: Department of PhysicsVikram VikramNo ratings yet
- VL2022230502064 Da02Document2 pagesVL2022230502064 Da02Asmit Anand Singh 21BEE0130No ratings yet
- Control Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeDocument6 pagesControl Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeiyerrohitNo ratings yet
- Exercise 2 PDFDocument5 pagesExercise 2 PDFWajih AbboudNo ratings yet
- Fem June2016 PDFDocument2 pagesFem June2016 PDFkarthiksampNo ratings yet
- Digital Control SystemDocument6 pagesDigital Control SystemTIGER BOYS FF2No ratings yet
- DSK - 4 - Reduction of Multiple SubsystemsDocument24 pagesDSK - 4 - Reduction of Multiple Subsystemsandik yuliantoNo ratings yet
- SS May 17Document3 pagesSS May 17SAURABH BHISENo ratings yet
- MathematicsDocument7 pagesMathematicsVindula GanegodaNo ratings yet
- Adobe Scan 29 Jan 2024Document25 pagesAdobe Scan 29 Jan 2024Ashlie JaneNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet