Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Determination of Combination of Input Values of
Simulated Motor Using Taguchi Method
Ariunbolor Purvee1 ; Purevdorj Batkhuu2
1
German-Mongolian Institute for Resources and Technology, Mongolia
2
Erdenet Technology School, Mongolian University of Science and Technology, Mongolia
Abstract:- The most popular type of motors in use today For dynamic simulation purposes, it is important to
is squirrel-cage induction motors. All types of motor know first, that the output parameters of a simulated motor
faults can be studied if a motor could be simulated based and a actual motor are the same. Rotational speed (rpm),
on the motor without faults. The goal of this study was to torque, and stator current are selected as output parameters of
determine the input optimum values for making it almost a simulated motor because these parameters are given on the
identical values of outputs f the simulated motor to the nameplate data on the motor. The parameters on the
target values on the nameplate data of the actual motor. nameplate of a motor become the parameters to check output
In this study, the Taguchi method, calculated using parameters of a simulated motor, correct or not. Output
MATLAB, was used to optimize the values input of the parameters from a simulated model should be very close to
simulated motors. For dynamic simulation purposes, the nameplate data on the actual motor if the model is robust.
inputs and outputs of a simulated motor need to be In this study, the parameters on the nameplate of the motor
selected. In this study, stator resistance, stator are called the targets and outputs of the simulated model
inductance, rotor bar resistance, rotor bar inductance, developed in Simulink MATLAB are called the output
rotor end ring resistance, and rotor end ring were selected parameters.
as the input parameters. Rotations per minute (rpm),
torque, and stator current were selected as output An actual motor with 11 kW and 415V is studied in this
parameters; they are also provided on the nameplate data research work. All the parameters of a normally-functioning
on the actual motor. These results allow us to develop actual motor are given in Appendix 1. Inputs of the dynamic
dynamic simulations to study a variety of motor faults simulation model are classified into three categories: 1)
and to compare the results of a simulated motor with and parameters on the nameplate from the manufacturer; 2)
without faults, to better understand and analyze the calculated parameters from the material and the actual
frequency domain, determine the root cause of the dimensions of the motor; and 3) measured parameters in the
vibrations. All code work is shown in the paper and one laboratory. Some parameters such as the number of stator
new formula was developed based on this study. coils/pole/phase, resistances and inductances of stator and
rotor bars and so on are calculated and/or measured
Keywords:- Model, Simulation, Optimization, Modelling, experimentally if not supplied by the manufacturers.
Dynamic Simulation, MATLAB. 1. Data on the nameplate from the manufacturer: nominal
voltage [V], nominal torque [Hm], nominal current [A],
I. INTRODUCTION number of poles, rotational speed [rpm], frequency [Hz],
/𝑌 connection, efficiency, power factor, number of stator
Squirrel induction motors are used mainly in industry. coils/poles/phases.
Experiments on motors, conducted in a laboratory setting, are 2. Calculated data: number of turns in the stator coils, air gap
expensive and limited, because the motor should be broken to average length [m], synchronous speed [rpm], slip [%],
create the fault to be studied. Another motor is again needed rotor angular velocity [rps], rotor mechanical speed [hz],
to be broken to study a different fault. Large capacity motors rotor frequency [hz], stator slot pitch [rad], pole pitch
are generally not allowed to break because of cost and safety [rad], number of stator coils/pole/phase, number of turns
factors. However, conducting research on a simulated motor, in the stator.
with and without faults, saves an enormous amount of time 3. Data from the laboratory: stator layout, number of rotor
and money. Motors of any capacity, with any type of fault bars, number of stator slots, stator slot pitch [slots], rotor
can be studied if a motor could be simulated in Simulink stack length [m], average radius [m], stator resistance
MATLAB or other software. In the present study, an actual [ohm], stator leakage inductance [H], rotor bar resistance
motor without a fault needed to be simulated. After [ohm], rotor bar inductance [H], rotor end ring resistance
developing a dynamic simulation, several types of motor [ohm], rotor end ring inductance [H].
faults were studied, based on the simulated motor without
faults. It is necessary to adequately know the electric, Six parameters such as stator resistance; stator
magnetic, and mechanical behavior of motors without faults inductance; rotor bar resistance; rotor bar inductance; rotor
for a reliable diagnostic method of fault identification. end ring resistance; and rotor end ring inductance from the
input parameters of a simulated motor, are selected as input
parameters, because these parameters are the most influential
IJISRT21APR517 www.ijisrt.com 1012
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
factors that affect the output parameters. In order to ‘y’ has a finite target value, usually nonzero, and the quality
understand key frequencies of motors with and without faults, loss is symmetric on the either side of the target. The nominal
the electrical, mechanical, and electromagnetic behaviors of the best of the Taguchi loss function is going to be used in
induction motors need to be understood. The dynamic this study because the targets, such as the nameplate
simulation model with highly accurate inputs models the parameters, are clear. So, this particular loss function will be
same the actual motor in the lab or field. Therefore, the goal used to optimise the input parameters to make the minimum
of this paper is to find the optimum input parameters that difference between outputs and targets and to improve the
make the minimum difference between outputs and targets, as shape time domain of output parameters of the dynamic
evaluated by the Taguchi method. simulation model of a squirrel-cage induction motor that has
been developed by Purvee [2].
II. INPUT PARAMETER OPTIMIZATION
The input parameters are listed in Table I. These six
The Taguchi method is a systematic application of the parameters were selected because they have the greatest
design and analysis of experiments for the purpose of influence on the motor outputs compared to other input
designing and improving product quality [1]. There are three parameters. In addition, these parameters were selected
types of Taguchi loss functions: 1) “the nominal the best; “the because they are capable of being varied within +/-10%,
smaller the better;” and “the larger the better.” The quality while still obtaining outputs that are almost at the value of the
characteristic “the nominal best,” occurs whenever the output targets.
TABLE I
INPUT PARAMETERS
Experimental levels
Input parameter Notation
1 (-10%) 2 3 (10%)
Resistance of stator Rs Rs-0. 1*Rs Rs Rs+0. 1*Rs
Resistance of rotor bar Rb Rb-0.1*Rb Rb Rb+0. 1*Rb
Resistance of rotor end-ring Re Re-0.1Re Re Re+0.1Re
Inductance of stator Ls Lls-0. 1*Lls Lls Lls+0.1*Lls
Inductance of rotor bar Lb Llb-0. 1*Llb Llb Llb+0.1*Llb
Inductance of end ring Le Lle-0. 1*Le Lle Lle+0.1*Lle
The values of input parameters of resistance of stator, resistance of rotor bar, resistance of rotor end-ring, inductance of
stator, inductance of rotor bar, inductance of end ring are listed in Table II.
TABLE II
VALUES OF INPUT PARAMETERS
Rotational speed (RPM) Torque (Te) Stator current (Is)
Notation 1 (- 3
1 (-10%) 2 3 (10%) 1 (-10%) 2 3 (10%) 2
10%) (10%)
Rs 2.35 2.608454802 2.87 3.58 3.98 4.37 4.05 4.50 4.95
1.59703E- 1.95193E- 3.31.E-05 6.67.E-05
Rb 1.77448E-05
05 05 3.64E-05 3.6E-05 7.3E-05 7.3E-05
1.37214E- 1.67706E- 1.37.E-06 3.10.E-06
Re 1.5246E-06
06 06 1.51E-06 1.5E-06 3.4E-06 3.4E-06
Ls 0.01458 0.0162 0.01782 0.02178 1.98.E-02 0.02178 0.0033 3.00.E-03 0.0033
1.73696E- 2.12295E- 1.75.E-06 4.44.E-07
Lb 1.92995E-06
06 06 1.93E-06 1.9E-06 4.9E-07 4.9E-07
1.3704E- 1.67493E- 1.04.E-07 2.22.E-07
Le 1.52266E-07
07 07 1.14E-07 1.1E-07 2.4E-07 2.4E-07
An efficient way to optimize the input parameters simultaneously is to plan experiments using L 18 orthogonal arrays [1].
Code to distribute the six input parameters within the L18 orthogonal array was developed specifically for this project by the
author [2] and the results are shown in Table III.
IJISRT21APR517 www.ijisrt.com 1013
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
TABLE III
EXPERIMENTAL DISTRIBUTION OF INPUT PARAMETERS WITHIN THE ORTHOGONAL ARRAY (RPM only)
Input parameters
Rs Rb Re Lls Llb Lle
2.35 1.597.E-05 1.372.E-06 1.458.E-02 1.737.E-06 1.370.E-07
2.35 1.774.E-05 1.525.E-06 1.620.E-02 1.930.E-06 1.523.E-07
2.35 1.952.E-05 1.677.E-06 1.782.E-02 2.123.E-06 1.675.E-07
2.61 1.597.E-05 1.372.E-06 1.620.E-02 1.930.E-06 1.675.E-07
2.61 1.774.E-05 1.525.E-06 1.782.E-02 2.123.E-06 1.370.E-07
2.61 1.952.E-05 1.677.E-06 1.458.E-02 1.737.E-06 1.523.E-07
2.87 1.597.E-05 1.525.E-06 1.458.E-02 2.123.E-06 1.675.E-07
2.87 1.774.E-05 1.677.E-06 1.620.E-02 1.737.E-06 1.370.E-07
2.87 1.952.E-05 1.372.E-06 1.782.E-02 1.930.E-06 1.523.E-07
2.35 1.597.E-05 1.677.E-06 1.782.E-02 1.930.E-06 1.370.E-07
2.35 1.774.E-05 1.372.E-06 1.458.E-02 2.123.E-06 1.523.E-07
2.35 1.952.E-05 1.525.E-06 1.620.E-02 1.737.E-06 1.675.E-07
2.61 1.597.E-05 1.525.E-06 1.782.E-02 1.737.E-06 1.523.E-07
2.61 1.774.E-05 1.677.E-06 1.458.E-02 1.930.E-06 1.675.E-07
2.61 1.952.E-05 1.372.E-06 1.620.E-02 2.123.E-06 1.370.E-07
2.87 1.597.E-05 1.677.E-06 1.620.E-02 2.123.E-06 1.523.E-07
2.87 1.774.E-05 1.372.E-06 1.782.E-02 1.737.E-06 1.675.E-07
2.87 1.952.E-05 1.525.E-06 1.458.E-02 1.930.E-06 1.370.E-07
The most influential six input parameters of RPM are determined by values in each row. 18 rows mean 18 experiments.
These 18 experiments are repeated until the minimum differences are achieved between the output parameters of the model, and
the target (parameters on the nameplate of the motors). This is the same processes of the torque (Te), the stator current (Is). The
final best results of targets such as torque, rotational speed, and stator are shown Table IV.
TABLE IV
OUTPUT PARAMETERS
RPM Te Is RPM Te Is
№ №
1450 73.69 20.8 1450 73.69 20.8
1 1452.133 74.615 20.228 10 1449.512 74.302 20.768
2 1449.811 74.337 20.644 11 1451.055 74.483 20.529
3 1447.175 74.008 21.123 12 1448.834 74.223 20.639
4 1449.839 74.312 20.991 13 1448.580 74.166 21.060
5 1447.344 74.010 21.311 14 1448.623 74.204 20.879
6 1447.737 74.106 20.761 15 1447.788 74.067 21.101
7 1448.524 74.159 21.318 16 1447.117 73.987 21.522
8 1446.365 73.916 21.246 17 1446.335 73.858 21.573
9 1445.179 73.726 21.696 18 1446.672 73.951 21.172
The 18 output values obtained experimentally were used to generate ‘the nominal the best’ loss function using [3] and [4].
The analysis of variance (ANOVA) method was used to determine the percentage contribution of each of the parameters
studied; we used this method to quantitatively estimate the input that the parameters made to the overall outputs, expressed as a
percentage, as described previously [1] - [5]. The fundamental techniques of ANOVA involve the total sum of squares, the
variance ratio, and degrees of freedom.
To simplify the analysis, code was developed that generated ‘the nominal the best,’ (S/N) ratios, and sum of squares [6].
The S/N ratio and values for the sums of the squares of, outputs (are torque, rotations per minute, stator current), are
tabulated in Table V.
IJISRT21APR517 www.ijisrt.com 1014
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
TABLE V
OUTPUT PARAMETERS, S/N RATIO AND SUMS OF SQUARES VALUES (RESULTS OF GENERATE NOMINAL BEST)
Nominal the best Squares of S/N ratio
Outputs eta S/N ratios SN sqSN Squares to mean m
№
RP RP
RPM Te Is Te Is Te Is RPM Te Is RPM Te Is
M M
1452.1 74.6 20.2 4.55 0.86 0.33 -6.58 0.68 4.85 43.29 0.46 23.52 7.74 62.61 44.76
1
3 2 3
1449.8 74.3 20.6 0.04 0.42 0.02 14.4 3.78 16.14 208.81 14.26 260.4 332.99 23.16 21.15
2
1 4 4 5 7
1447.1 74.0 21.1 7.98 0.10 0.10 -9.02 9.95 9.82 81.39 99.03 96.45 27.29 1.85 2.96
3
7 1 2
1449.8 74.3 20.9 0.03 0.39 0.04 15.8 4.12 14.36 250.94 16.99 206.2 385.68 19.96 7.97
4
4 1 9 4 7
1447.3 74.0 21.3 7.05 0.10 0.26 -8.48 9.90 5.84 71.97 98.06 34.08 21.96 1.72 32.51
5
4 1 1
1447.7 74.1 20.7 5.12 0.17 0.00 -7.09 7.63 28.11 50.30 58.15 790.4 10.85 0.93 274.7
6
4 1 6 4 3
1448.5 74.1 21.3 2.18 0.22 0.27 -3.38 6.58 5.71 11.43 43.25 32.62 0.17 4.05 33.98
7
2 6 2
1446.3 73.9 21.2 13.2 0.05 0.20 - 12.9 7.02 125.67 166.5 49.30 54.95 18.64 20.41
8 6 2 5 1 11.2 1 7
1
1445.1 73.7 21.7 23.2 0.00 0.80 - 28.9 0.95 186.65 836.5 0.91 97.31 413.5 112.1
9 8 3 0 4 13.6 2 7 2
6
1 1449.5 74.3 20.7 0.24 0.37 0.00 6.22 4.27 29.79 38.72 18.23 887.6 100.41 18.66 333.1
0 1 0 7 3 8
1 1451.0 74.4 20.5 1.11 0.63 0.07 -0.46 2.01 11.34 0.21 4.04 128.6 11.13 43.28 0.04
1 5 8 3 4
1 1448.8 74.2 20.6 1.36 0.28 0.03 -1.34 5.47 15.89 1.78 29.91 252.4 6.06 9.73 18.91
2 3 2 4 4
1 1448.5 74.1 21.0 2.02 0.23 0.07 -3.05 6.45 11.70 9.29 41.60 136.8 0.56 4.58 0.03
3 8 7 6 8
1 1448.6 74.2 20.8 1.90 0.26 0.01 -2.78 5.79 22.10 7.72 33.50 488.2 1.04 7.85 111.4
4 2 0 8 7 5
1 1447.7 74.0 21.1 4.89 0.14 0.09 -6.89 8.46 10.43 47.54 71.63 108.7 9.59 0.02 1.24
5 9 7 0 1
1 1447.1 73.9 21.5 8.31 0.09 0.52 -9.20 10.5 2.83 84.58 111.2 8.01 29.15 3.83 75.86
6 2 9 2 5 3
1446.3 73.8 21.5 13.4 0.03 0.60 - 15.5 2.23 127.25 240.2 4.98 55.99 47.74 86.63
1
4 6 7 3 11.2 0 1
7
8
1446.6 73.9 21.1 11.0 0.07 0.14 - 11.6 8.60 109.08 135.7 73.96 44.18 9.37 8.64
1
7 5 7 8 10.4 5 4
8
4
Grand total sum of Total sum of squares to
Average Average Average
squares mean
1448.2 74.1 21.0 5.98 0.25 0.20 -3.80 8.59 11.54 1456.6 2019. 3583. 1197.0 691.4 1186.
6 4 3 4 4 5 6 7 6
The evaluated S/N ratios (S/Nij ) are determined by the S/N ratios that were calculated using values produced from the
experimental distributions (see Table III). The evaluated S/N ratio is calculated by (1), which was developed based on this
research study.
∑ni=1 S/Nirj
S/Nij = (1)
nk
Here: S/Nirj − sum of the S/N ratio in the particular column, nk − number of non-zero values of the S/N ratio.
IJISRT21APR517 www.ijisrt.com 1015
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
The following four steps are used to calculate the evaluated S/N ratios:
Step 1. Distribution of 1s, 2s, and 3s into orthogonal arrays: The Rs, Rb, Re, Ls, Lb, Le columns of of orthogonal arrays kept in
orth18.txt have been divided into three columns each, matching the three experimental levels. For example: the Column Rs is
divided into columns labeled Rs1, Rs2 and Rs3. All 1s are in Rs1, all 2s are in Rs2, & all 3s are in Rs3. All the rest of the parameters
follow this same process.
Step 2. Replacement by S/N ratio: All 1s in Rs1, Rb1, Re1,Ls1,Lb1,Le1, and all 2s in Rs2, Rb2, Re2, Ls2, Lb2, Le2 and all threes in Rs3,
Rb3, Re3, Ls3, Lb3, Le3 were replaced by the S/N ratios of rotational speed, torque and stator current corresponding to the
experimental distribution of the row inTable V. The evaluated S/N ratio is calculated by (1).
Step 3. Reconstruct a table: The evaluated S/N ratios of RPM are reconstructed into the table with six rows and three columns.
Step 4. Plot a Taguchi graph: Taguchi graphs are plotted by the evaluated S/N ratios of each parameter (each row).
The evaluated S/N ratios of torque, stator current are calculated the same way as the evaluated S/N ratios of rotational speed.
Codes for Steps 1 - 4 were developed by the author [7] and the results are shown in Tables VII-IX.
TABLE VII
DISTRIBUTION OF ORTHOGONAL ARRAYS
Input parameters Distribution of input parameters
R L Rs Rb Re Ls Lb Le
s b e s b e 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3
1 1 1 1 1 1 1 1 1 1 1 1
1 2 2 2 2 2 1 2 2 2 2 2
1 3 3 3 3 3 1 3 3 3 3 3
2 1 1 2 2 3 2 1 1 2 2 3
2 2 2 3 3 1 2 2 2 3 3 1
2 3 3 1 1 2 2 3 3 1 1 2
3 1 2 1 3 3 3 1 2 1 3 3
3 2 3 2 1 1 3 2 3 2 1 1
3 3 1 3 2 2 3 3 1 3 2 2
1 1 3 3 2 1 1 1 3 3 2 1
1 2 1 1 3 2 1 2 1 1 3 2
1 3 2 2 1 3 1 3 2 2 1 3
2 1 2 3 1 2 2 1 2 3 1 2
2 2 3 1 2 3 2 2 3 1 2 3
2 3 1 2 3 1 2 3 1 2 3 1
3 1 3 2 3 2 3 1 3 2 3 2
3 2 1 3 1 3 3 2 1 3 1 3
3 3 2 1 2 1 3 3 2 1 2 1
Based on Table VII the results of the evaluated S/N ratios of rotational speed (RPM), torque (Te) and stator current (Is) were
calculated and are shown in Table VIII.
TABLE VIII
DISTRIBUTION OF S/N RATIO AND S/N RATIOS
S/N Rs Rs Rs3 Rb Rb Rb Re1 Re Re3 Ls Ls2 Ls3 Lb Lb Lb Le1 Le2 Le3
1 2 1 2 3 2 1 1 2 3
Rotational Speed (RPM)
-6.6 - - -6.6 - -6.6 -6.6
6.6 6.6 6.6
14.5 14. 14. 14. 14. 14. 14.
5 5 5 5 5 5
-9.2 - -9.2 -9.2 -9.2 - -9.2
9.2 9.2
15.8 15. 15. 15. 15. 15. 15.
8 8 8 8 8 8
-8.5 - -8.5 - -8.5 - -8.5
8.5 8.5 8.5
-7.9 - -7.9 -7.9 - -7.9 -7.9
7.9 7.9
IJISRT21APR517 www.ijisrt.com 1016
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
-3.4 -3.4 - - - - -3.4
3.4 3.4 3.4 3.4
-11.2 - - - - - -
11. 11. 11. 11. 11. 11.
2 2 2 2 2 2
-13.7 - - - - - -
13. 13. 13. 13. 13. 13.
7 7 7 7 7 7
6.2 6.2 6.2 6.2 6.2 6.2 6.2
-0.5 - -0.5 -0.5 - - -0.5
0.5 0.5 0.5
-1.3 - -1.3 - -1.3 -1.3 -1.3
1.3 1.3
-3.5 - - - -3.5 -3.5 -3.5
3.5 3.5 3.5
-2.8 - -2.8 -2.8 - -2.8 -2.8
2.8 2.8
-6.9 - -6.9 -6.9 -6.9 - -6.9
6.9 6.9
-9.2 -9.2 - -9.2 -9.2 - -9.2
9.2 9.2
-11.3 - - - - - -
11. 11. 11. 11. 11. 11.
3 3 3 3 3 3
-1.4 -1.4 -1.4 - - -1.4 -1.4
1.4 1.4
Evaluat 0.5 - -9.9 0.0 -3.3 -8.1 -3.8 - -5.5 - 0.3 -6.5 -6.8 1.6 - -6.2 -3.2 -2.0
ed 2.1 2.0 5.1 6.2
Torque (Te)
0.7 0.7 0.7 0.7 0.7 0.7 0.7
3.8 3.8 3.8 3.8 3.8 3.8 3.8
10.0 10. 10. 10. 10. 10. 10.
0 0 0 0 0 0
4.1 4.1 4.1 4.1 4.1 4.1 4.1
9.9 9.9 9.9 9.9 9.9 9.9 9.9
7.6 7.6 7.6 7.6 7.6 7.6 7.6
6.6 6.6 6.6 6.6 6.6 6.6 6.6
12.9 12. 12. 12. 12. 12. 12.
9 9 9 9 9 9
28.9 28. 28. 28. 28. 28. 28.
9 9 9 9 9 9
4.3 4.3 4.3 4.3 4.3 4.3 4.3
2.0 2.0 2.0 2.0 2.0 2.0 2.0
5.5 5.5 5.5 5.5 5.5 5.5 5.5
6.4 6.4 6.4 6.4 6.4 6.4 6.4
5.8 5.8 5.8 5.8 5.8 5.8 5.8
8.5 8.5 8.5 8.5 8.5 8.5 8.5
10.5 10. 10. 10. 10. 10. 10.
5 5 5 5 5 5
15.5 15. 15. 15. 15. 15. 15.
5 5 5 5 5 5
11.7 0.0 11. 11. 11. 11. 11. 11.
7 7 7 7 7 7
Evaluat 4.4 7.1 14. 5.4 8.3 12. 9.9 7.3 8.5 5.7 7.5 12. 8.1 9.8 7.9 8.0 9.9 7.9
ed 4 0 5
Stator current (Is)
4.8 4.8 4.8 4.8 4.8 4.8 4.8
16.1 16. 16. 16. 16. 16. 16.
1 1 1 1 1 1
IJISRT21APR517 www.ijisrt.com 1017
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
9.8 9.8 9.8 9.8 9.8 9.8 9.8
14.4 14. 14. 14. 14. 14. 14.
4 4 4 4 4 4
5.8 5.8 5.8 5.8 5.8 5.8 5.8
28.1 28. 28. 28. 28. 28. 28.
1 1 1 1 1 1
5.7 5.7 5.7 5.7 5.7 5.7 5.7
7.0 7.0 7.0 7.0 7.0 7.0 7.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0
29.8 29. 29. 29. 29. 29. 29.
8 8 8 8 8 8
11.3 11. 11. 11. 11. 11. 11.
3 3 3 3 3 3
15.9 15. 15. 15. 15. 15. 15.
9 9 9 9 9 9
11.7 11. 11. 11. 11. 11. 11.
7 7 7 7 7 7
22.1 22. 22. 22. 22. 22. 22.
1 1 1 1 1 1
10.4 10. 10. 10. 10. 10. 10.
4 4 4 4 4 4
2.8 2.8 2.8 2.8 2.8 2.8 2.8
2.2 2.2 2.2 2.2 2.2 2.2 2.2
8.6 8.6 8.6 8.6 8.6 8.6 8.6
Evaluat 14. 15. 4.6 11. 10. 12. 7.4 10. 16. 13. 11. 10. 11. 15. 7.7 11. 11. 11.
ed 6 4 5 8 3 6 6 5 1 1 6 3 1 8 7
The evaluated S/N ratios of rotational speed, stator current and torque among all levels can be determined by using the
values from the final row in Table VIII. The evaluated S/N ratios and calculated values are shown in Table IX.
TABLE IX
THE EVALUATED S/N RATIOS AND CALCULATED VALUES
Parameter Evaluated S/N ratios at Degrees Sum of Mean Variance % of Error of
r experimental levels (L) of Squares square ratio variance mean
1 2 3 Freedom (SS_S/Nij) (Msq) Fr ratio Fr square
(DOFr) (eMsq)
Rotation per minute (rpm)
Rss 0.546 -2.076 -9.862 2 351.680 175.840 6.460 29.379
Rb -0.024 -3.294 -8.075 2 196.756 98.378 3.614 16.437
Re -3.839 -2.040 -5.513 2 36.192 18.096 0.665 3.023
27.218
Lls -5.123 0.276 -6.545 2 155.396 77.698 2.855 12.981
Llb -6.757 1.605 -6.240 2 263.476 131.738 4.840 22.010
Lle -6.232 -3.168 -1.993 2 57.469 28.734 1.056 4.801
Torque (Te)
Rss 4.359 7.058 14.350 2 320.576 160.288 18.062 46.361
Rb 5.440 8.314 12.014 2 130.331 65.165 7.343 18.848
Re 9.949 7.304 8.514 2 21.037 10.518 1.185 3.042
8.874
Lls 5.721 7.547 12.499 2 147.594 73.797 8.316 21.345
Llb 8.104 9.755 7.908 2 12.347 6.174 0.696 1.786
Lle 7.978 9.889 7.901 2 15.216 7.608 0.857 2.201
Stator current (Is)
Rss 14.639 15.423 4.558 2 440.587 220.294 4.226 37.132
Rb 11.541 10.778 12.300 2 6.949 3.475 0.067 0.586
Re 7.361 10.646 16.613 2 264.002 132.001 2.532 22.250
52.123
Lls 13.452 11.111 10.056 2 36.263 18.131 0.348 3.056
Llb 11.634 15.324 7.661 2 176.220 88.110 1.690 14.851
Lle 11.088 11.846 11.685 2 1.914 0.957 0.018 0.161
IJISRT21APR517 www.ijisrt.com 1018
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
The values underlined in Table IX represent the highest values which were subsequently recalculated as the values of input
parameters in Table II until the values for all six input parameters were maximized. As can be seen from Table IX, the variance
ratio for parameter Re, Le of the RPM; Re, Lb and Le of the torque; Rb, Ls and Le of stator current are small. It means that all
those parameters are identified as insignificant. High values for the calculated variance ratios means that they have significant
effects on the outputs of the model. Therefore, the highest variance ratios are Rs and Lb of the rotational speed; Rs of the torque;
Rs of the stator current, and are therefore the most influential parameters.
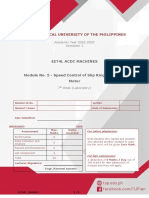
The graphical results using Taguchi method are shown in Fig.1.
Lb2
Rs1 Ls2
Rb1
Rs2 Re2 Le3
Rb2 Le2
Re1
Re3Ls1
Ls3 Lb1 Lb3 Le1
Rb3
Rs3
a) S/N ratio of RPM
Rs3
Ls3
Rb3
Re1 Lb2 Le2
Rb2 Re3
Lb1 Lb3 Le1 Le3
Re2 Ls2
Rs2
Rb1 Ls1
Rs1
b) S/N ratio of torque
Re3
Rs2 Lb2
Rs1
Ls1
Rb3
Rb1 Lb1 Le2 Le3
Rb2 Ls2 Le1
Re2
Ls3
Re1 Lb3
Rs3
c) S/N ratioof stator current
Fig.1. Plots of evaluated S/N ratios
Here, the optimum conditions were: Rs2 Rb3 Re3 Ls3 Lb3 Le3 in the RPM.
IJISRT21APR517 www.ijisrt.com 1019
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
III. RESULTS AND DISCUSSIONS
The non-optimum input parameters are shown in Table X and the optimum input parameters are shown in Table XI
TABLE X
NON-OPTIMUM INPUT PARAMETERS AND OUTPUTS CORRESPONDING THE NON-OPTIMUM INPUT
PARAMETERS
Percentage to close to the
Notatio Optimum input Output parameters target
Input parameter
n values RPM Te Is
RPM Te Is
1450 73.69 20.8
Rotational speed (RPM)
Resistance of stator Rs 3.58
Resistance of rotor bar Rb 2.43E-05
Resistance of rotor end-
Re 1.68E-06 97.03
ring 1449.76 74.62 20.18 99.98% 98.76%
%
Inductance of stator Ls 1.80E-02
Inductance of rotor bar Lb 1.93E-06
Inductance of end ring Le 1.14E-07
Torque (te)
Resistance of stator Rs 4.37
Resistance of rotor bar Rb 3.64E-05
Resistance of rotor end-
Re 99.79
ring 1.66E-06 1442.27 73.85 20.76 99.47% 99.79%
%
Inductance of stator Ls 1.78E-02
Inductance of rotor bar Lb 1.74E-06
Inductance of end ring Le 9.36E-08
Stator Current (Is)
Resistance of stator Rs 3.98
Resistance of rotor bar Rb 3.31E-05
Resistance of rotor end-
Re 99.12
ring 1.37E-06 1445.16 74.15 20.62 99.67% 99.39%
%
Inductance of stator Ls 1.98E-02
Inductance of rotor bar Lb 1.75E-06
Inductance of end ring Le 1.04E-07
TABLE XI
OPTIMUM INPUT PARAMETERS AND OUTPUTS CORRESPONDING THE OPTIMUM INPUT PARAMETERS
Percentage to close to the
Notatio Optimum input Output parameters target
Input parameter
n values RPM Te Is
RPM Te Is
1450 73.69 20.8
Resistance of stator Rs 4.50
Resistance of rotor bar Rb 3.31E-03
Resistance of rotor end- 1.00E-04
Re 74.18
ring 973.78 33.87 15.43 67.16% 45.96%
%
Inductance of stator Ls 1.98E-02
Inductance of rotor bar Lb 1.75E-06
Inductance of end ring Le 1.04E-07
“Values at the optimum levels” means optimum inputs to make the minimum difference between outputs and targets. As
shown in Table XI, each of the values at the optimum levels has produced different outputs. As can be seen in the torque and
stator current columns in Table XI, stator current and torque are increasing, but rpm is decreasing compared to the value in the
column for the optimum level of rotational speed. It means that the optimum inputs of rotational speed to make the minimum
difference between output and targets of rotational speed could not make the minimum difference between output and targets of
stator current and torque. From the results of this study, we have found that the Taguchi method is useful when optimizing single
parameter performance characteristics. On the other hand, this method is too complicated a procedure to be used to determine
input parameters for optimizing more than one output, simultaneously.
IJISRT21APR517 www.ijisrt.com 1020
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
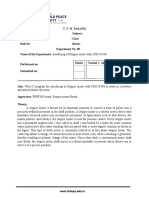
Outputs corresponding to the non-optimum and optimum input parameters for torque of the dynamic simulation are shown
in Fig.2. For the stator current and rotational torque, the output of the dynamic simulation.
2000 Rotational speed 2000
Rotational speed
1500
1000
1000
RPM
RPM
500
0
0 0.5 1 1.5 0
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-1000 time,c -500 time,c
150 100 Torque
Torque
100
50
Te
Te
50
0
0 0 0.2 0.4 0.6 0.8 1 1.2 1.4
0 0.5 1 1.5
-50 time,c -50 time,c
100 Stator Current 100 Stator Current
50 50
Is
0
Is
0
0 0.5 1 1.5 0 0.2 0.4 0.6 0.8 1 1.2 1.4
-50
-50
-100
-100 time,c time,c
a) Non optimum input parameter b) optimum input parameter for Te
Fig.2. Outputs of the simulated motor
The relation between each of the six input parameters and three output parameters are studied based on the simulated motor
(Fig.3). The effects on the three output parameters were obtained by changing the six parameters are changed one by one and
keeping rest constant. Normalized values of the six inputs and three outputs are between 0 and 1.
a) Effects of each of the six input parameters on RPM
b) Effects of each of the six input parameters on stator current (Is)
Fig.3. Plots of the effects of each of the six input parameters
IJISRT21APR517 www.ijisrt.com 1021
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
As shown in Figure 3 (a), all active resistances (Rs, concluded that stator current tends to increase as the values
Rb, Re) are the most important parameters influencing of all parameters (Rs, Rb, Re, Ls, Lb, Le) are increased.
RPM. Do not greatly affect the RPM of the simulated motor. Values higher than Rsa=6.992; Rb=3.64E-04; Re=2.19-05;
The higher the Rs resistance, the lower the RPM. Generally, Lls=2.77E-02; Llb=3.33E-06; and Lle=2.60E-07, shut down
it is concluded that RPM tends to increase as the values of the simulated motors.
all parameters (Rs, Rb, Re, Ls, Lb, Le) are decreased. Since
the relation between RPM and Te torque are almost linear, The software, using the Taguchi method to optimize
the effects of the input parameters on the torque is not the inputs for minimizing the difference between target and
discussed here. outputs, is shown in Fig.4 and the code for the MATLAB
GUIDE (GUI) is shown [8]. This code includes all codes
As shown in Figure 3 (b), expect for the stator current, that are shown above; therefore, it easy to update and
all parameters, especially, stator resistance (Rs) and stator change to use other optimizations, using the Taguchi
inductance are affected by stator current. The higher the Rs method.
resistance, the higher the stator current. Actually, it is
IV. CONCLUSION will be used to create and understand behaviors of
motor faults due to faulty bearings, rotor bars,
1) The determination of input parameters to the model, a eccentricity or stators, based on vibration and current
simulated squirrel cage induction motor, which is as spectrum analyses. Characteristic frequencies of faults
close to the nameplate data (rpm, stator current and (such as bearing, rotor, eccentricity) in the spectrum
torque) as possible, is based on the Taguchi method. analyses can be calculated from the actual rpm of the
2) A new equation for calculating the evaluated S/N ratio motors. Therefore, studying the rpm is essential for any
is developed based on this research study. experiment to understand the defective frequencies.
3) The differences between output and nameplate data are
reduced by using the calculation of the Taguchi method. ACKNOWLEDGMENT
Stator resistance was confirmed to be the most
significant parameter. This research was conducted with funding from the
4) After optimizing the inputs to get the outputs of the Strategy Research Development Fund of GMIT, German
dynamic simulation, so as to achieve the targets (which Mongolian Institute for Resources and Technology, and GIZ
are the nameplate parameters), we found that the (Deutsche Gesellschaft für Internationale Zusammenarbeit),
technical configuration of the simulated motor achieved the German Agency for International Cooperation in
close approximation to the actual motor. Thus, in our Mongolia.
next study, the motor we simulated using MATLAB
IJISRT21APR517 www.ijisrt.com 1022
Volume 6, Issue 4, April – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
APPENDIX
PARAMETERS OF THE SIMULATED INDUCTION MACHINE
Name of parameter Value Unit Name of parameter Value Unit
Data on the nameplate from the manufacturer Measured data from the laboratory:
Input voltages, V 415 V Number of rotor bars 28
Full load line current, A 20.8 A Number of stator slots 36
Rated power 11 kW Number of stator coils/pole/phase 3
Number of poles 4 Number of turns in the stator coils 20
Speed, rpm 1450 RPM Rotor stack length 0.15 m
Efficiency 0.89 Average radius 0.078 m
Power factor 0.83 Air gap average length 0.0006 m
Nominal torque 73.69 Nm Stator resistance 3.2857 Ohm
Connection delta Stator leakage inductance 0.018 H
Calculated data Rotor end ring resistance 1.39E-06 Ohm
Phase current in full load 11.96 A Rotor end ring leakage inductance 9.36E-08 H
Synchronous speed 1500 rpm Rotor bar resistance 3.71E-05 Ohm
Slip 0.033 % Rotor bar leakage inductance 1.31E-06 H
Rotor angular velocity 151.8 rps Stator layout: [1 10; 3 12; 20 11; 19 28; 21 30; 2 29; 13 22; 15 24; 32
Rotor mechanical speed 24.17 Hz 23; 31 4; 33 6; 14 5; 7 16; 9 18; 26 17; 25 34; 27 36; 8 35]
Rotor frequency 1.67 Hz
REFERENCES
[1]. Y. K. Joo, S. H. Zhang, J. H. g. Yoon, and T. Y. Cho,
“Optimization of the adhesion strength of Arc ion
plating TiALN films by the Taguchi method,”
Materials (Basel)., vol. 2, no. 2, pp. 699–709, 2009.
[2]. Ariunbolor Purvee, “Distribute 6 input parameters
within L18 orthogonal array,” MATLAB Central File
Exchange, 2020. [Online]. Available:
https://tinyurl.com/y7vxuer3.
[3]. S. Buyske and R. Trout, Robust Design and Taguchi
Methods. 2010, p. 6.
[4]. H. Mohamed, M. H. Lee, and M. Sarahintu, “The Use
of Taguchi Method to Determine Factors Affecting the
Performance of Destination Sequence Distance Vector
Routing Protocol in Mobile Ad Hoc Networks,” J.
Math. Stat., vol. 4, no. 4, pp. 194–198, 2008.
[5]. J. Kang and M. Hadfield, “The polishing process of
advanced ceramic balls using a novel eccentric lapping
machine,” Proc. Inst. Mech. Eng. Part B J. Eng.
Manuf., vol. 219, no. 7, pp. 493–504, 2005.
[6]. Ariunbolor Purvee, “Determine the nominal the best
based on ANOVA,” MATLAB Central File Exchange,
2020. [Online]. Available:
https://tinyurl.com/yb9jkr9h.
[7]. Ariunbolor Purvee, “Calculate and plot the evaluated
S/N ratios of Taguchi Method,” MATLAB Central
File Exchange, 2020. [Online]. Available:
https://tinyurl.com/ydar9cnz.
[8]. Ariunbolor Purvee, “GUI for plotting the Taguchi
graphics,” MATLAB Central File Exchange, 2020.
[Online]. Available: https://tinyurl.com/y9od7f2a.
IJISRT21APR517 www.ijisrt.com 1023
You might also like
- Application of GA Took For Design Optimization of Squirrel Cage Induction MotorDocument14 pagesApplication of GA Took For Design Optimization of Squirrel Cage Induction Motordarshil modiNo ratings yet
- Parameters Identification of Induction Motor Model BasedDocument10 pagesParameters Identification of Induction Motor Model Basedretrueke1170No ratings yet
- An Off Line Technique For Prediction of Performance Characteristics of Three Phase Induction Motor IJERTV2IS1417Document6 pagesAn Off Line Technique For Prediction of Performance Characteristics of Three Phase Induction Motor IJERTV2IS1417Rayhana KararNo ratings yet
- Comparison of D, q,0 Model and Transient Finite Elements Analyses of Induction MotorDocument7 pagesComparison of D, q,0 Model and Transient Finite Elements Analyses of Induction MotorAnimeshNo ratings yet
- On The Determination of Induction Motor Parameters From Manufacturer Data ForDocument10 pagesOn The Determination of Induction Motor Parameters From Manufacturer Data ForjosegirotaicNo ratings yet
- MTB UpdatedDocument5 pagesMTB UpdatedAhmad UsmanNo ratings yet
- Shethopt 2003Document4 pagesShethopt 2003sumitNo ratings yet
- Pedra 2004Document8 pagesPedra 2004josegirotaicNo ratings yet
- Simulations of Induction Machine BehaviourDocument10 pagesSimulations of Induction Machine BehaviourorcunNo ratings yet
- Vartanian2009 PDFDocument6 pagesVartanian2009 PDF13sandipNo ratings yet
- Electric Power Systems ResearchDocument11 pagesElectric Power Systems Researchmarut1999No ratings yet
- SPG Motor PDFDocument7 pagesSPG Motor PDFSenthil KumarNo ratings yet
- Optimized Design of Submersible Induction Motor Using Maxwell 16Document6 pagesOptimized Design of Submersible Induction Motor Using Maxwell 16IAEME PublicationNo ratings yet
- Rajagopaldes 2003Document4 pagesRajagopaldes 2003g c agnihotriNo ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- 4Document5 pages4Alsmany ArdabNo ratings yet
- Mca 11 00193 PDFDocument11 pagesMca 11 00193 PDFLuka NikitovicNo ratings yet
- Modelling and Analysis of Induction Motor Using LabviewDocument11 pagesModelling and Analysis of Induction Motor Using LabviewNituNo ratings yet
- 开关磁阻电机的ANSOFT建模方法Document28 pages开关磁阻电机的ANSOFT建模方法Nuwantha FernandoNo ratings yet
- Machines Lab - Module-5Document9 pagesMachines Lab - Module-5michelle zipaganNo ratings yet
- Servo Motor Design Using MotorSolveDocument20 pagesServo Motor Design Using MotorSolveSK PNo ratings yet
- Design of A Three Phase Squirrel Cage Induction Motor For Electric Propulsion SystemDocument6 pagesDesign of A Three Phase Squirrel Cage Induction Motor For Electric Propulsion SystemBahi EzioNo ratings yet
- Analysis of Synchronous Machine Modeling For Simulation and Industrial ApplicationsDocument16 pagesAnalysis of Synchronous Machine Modeling For Simulation and Industrial ApplicationsDa DebebeNo ratings yet
- Designing Servo Motors Using JMAG-Express Online VersionDocument5 pagesDesigning Servo Motors Using JMAG-Express Online VersionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- AC Induction Motor Constant Parameter Model ExamplesDocument7 pagesAC Induction Motor Constant Parameter Model ExamplesHandriToarPangkeregoNo ratings yet
- Technofocus PaperDocument2 pagesTechnofocus PaperAkshay DhakanNo ratings yet
- Development of An SRM-based Drive For Built-In Automotive Vacuum CleanersDocument11 pagesDevelopment of An SRM-based Drive For Built-In Automotive Vacuum CleanersBobur KurbonovNo ratings yet
- Simulink Model of an Induction Machine DynamicsDocument9 pagesSimulink Model of an Induction Machine DynamicsHernanda BudizNo ratings yet
- A Three-Phase Induction Motor ProblemDocument26 pagesA Three-Phase Induction Motor ProblemmehmetNo ratings yet
- Three-phase Induction Motor Analysis Using RMxprt and EMpulseDocument26 pagesThree-phase Induction Motor Analysis Using RMxprt and EMpulseowen674s100% (2)
- Parameter Estimation For Electric Motor Condition MonitoringDocument12 pagesParameter Estimation For Electric Motor Condition MonitoringNatarajNo ratings yet
- Synchronous Reluctance Motor: Design, Optimization and ValidationDocument6 pagesSynchronous Reluctance Motor: Design, Optimization and Validationmr. dossNo ratings yet
- ICPS 2016 - Paper Presentation No - 99Document16 pagesICPS 2016 - Paper Presentation No - 99Tulluri Chiranjeevi Anil KumarNo ratings yet
- A Novel Approach To Detection of Some Parameters For IMDocument6 pagesA Novel Approach To Detection of Some Parameters For IMsajs201No ratings yet
- Performance Evaluation of The Induction Motor PDFDocument8 pagesPerformance Evaluation of The Induction Motor PDFMartin Rudy Mogrovejo VasquezNo ratings yet
- 50 MW Generator Testing QuoteDocument8 pages50 MW Generator Testing QuoteStephen BridgesNo ratings yet
- Modification of Geometric Parameters in Outer Rotor Permanent Magnet Generators To Improve THD, Efficiency, and Cogging TorqueDocument13 pagesModification of Geometric Parameters in Outer Rotor Permanent Magnet Generators To Improve THD, Efficiency, and Cogging Torqueeljavi_7No ratings yet
- 2018, - Altair - Multi-Physics Electric Motor Optimization For Noise ReductionDocument5 pages2018, - Altair - Multi-Physics Electric Motor Optimization For Noise ReductionburchandadiNo ratings yet
- Application of Genetic Algorithms For Determining The Parameters of Induction MotorsDocument5 pagesApplication of Genetic Algorithms For Determining The Parameters of Induction Motorshardik desaiNo ratings yet
- Experiment - 9 - Stepper MotorDocument5 pagesExperiment - 9 - Stepper MotorABHISHEK SHARMANo ratings yet
- Leackage ReactanceDocument4 pagesLeackage ReactanceDHAVAL SHAHNo ratings yet
- EPE2013 - FPGA Motor Drive Based SRM PDFDocument8 pagesEPE2013 - FPGA Motor Drive Based SRM PDFKrishnam NaiduNo ratings yet
- Permanent Magnet Starter-Generator For Aircraft Application: September 2014Document4 pagesPermanent Magnet Starter-Generator For Aircraft Application: September 2014PraveenKumarRanjanNo ratings yet
- 238Document4 pages238Kamaleswaran SankaranNo ratings yet
- Axial PErmanent MAgnetDocument6 pagesAxial PErmanent MAgnetSatyam Swarup100% (1)
- Chapter 19 - Dynamic ModelsDocument141 pagesChapter 19 - Dynamic Modelswoldemariam workuNo ratings yet
- Hysteresis Motor Seminar ReportDocument27 pagesHysteresis Motor Seminar ReportSubham GhoshNo ratings yet
- Condition Assessment - HT MachineDocument20 pagesCondition Assessment - HT MachineFerozMujawar0% (1)
- Contoh ETAP 2Document6 pagesContoh ETAP 2Ken Rama AdityoNo ratings yet
- 2540-Article Text-2517-1-6-20210517Document9 pages2540-Article Text-2517-1-6-20210517Atharv NadkarniNo ratings yet
- Adaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet MotorDocument6 pagesAdaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet Motorfong jeffNo ratings yet
- 12 Tie 0965 R2Document12 pages12 Tie 0965 R2ZahraaRaz 1996No ratings yet
- Analysis of Tesla Model 3 Motor Performance Using MotorXP-PM SoftwareDocument12 pagesAnalysis of Tesla Model 3 Motor Performance Using MotorXP-PM SoftwareName24122021No ratings yet
- Energies 13 02282Document17 pagesEnergies 13 02282FATİH ÖNTAÇNo ratings yet
- Analysis of Power and Torque For The IPM Motors With High Flux Density in StatorDocument8 pagesAnalysis of Power and Torque For The IPM Motors With High Flux Density in Statorphan hoai nam PhanNo ratings yet
- Electrical Motor Products: International Energy-Efficiency Standards and Testing MethodsFrom EverandElectrical Motor Products: International Energy-Efficiency Standards and Testing MethodsNo ratings yet
- Handbook of Microwave Component Measurements: with Advanced VNA TechniquesFrom EverandHandbook of Microwave Component Measurements: with Advanced VNA TechniquesRating: 4 out of 5 stars4/5 (1)
- Embedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityFrom EverandEmbedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Comparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightDocument4 pagesComparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Electro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyDocument7 pagesElectro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonDocument14 pagesTerracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions on Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions on Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Review: Pink Eye Outbreak in IndiaDocument3 pagesA Review: Pink Eye Outbreak in IndiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Auto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETDocument6 pagesAuto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design, Development and Evaluation of Methi-Shikakai Herbal ShampooDocument8 pagesDesign, Development and Evaluation of Methi-Shikakai Herbal ShampooInternational Journal of Innovative Science and Research Technology100% (3)
- A Survey of the Plastic Waste used in Paving BlocksDocument4 pagesA Survey of the Plastic Waste used in Paving BlocksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentDocument7 pagesCyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hepatic Portovenous Gas in a Young MaleDocument2 pagesHepatic Portovenous Gas in a Young MaleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Explorning the Role of Machine Learning in Enhancing Cloud SecurityDocument5 pagesExplorning the Role of Machine Learning in Enhancing Cloud SecurityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Navigating Digitalization: AHP Insights for SMEs' Strategic TransformationDocument11 pagesNavigating Digitalization: AHP Insights for SMEs' Strategic TransformationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Perceived Impact of Active Pedagogy in Medical Students' Learning at the Faculty of Medicine and Pharmacy of CasablancaDocument5 pagesPerceived Impact of Active Pedagogy in Medical Students' Learning at the Faculty of Medicine and Pharmacy of CasablancaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automatic Power Factor ControllerDocument4 pagesAutomatic Power Factor ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mobile Distractions among Adolescents: Impact on Learning in the Aftermath of COVID-19 in IndiaDocument2 pagesMobile Distractions among Adolescents: Impact on Learning in the Aftermath of COVID-19 in IndiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Review of Biomechanics in Footwear Design and Development: An Exploration of Key Concepts and InnovationsDocument5 pagesReview of Biomechanics in Footwear Design and Development: An Exploration of Key Concepts and InnovationsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Studying the Situation and Proposing Some Basic Solutions to Improve Psychological Harmony Between Managerial Staff and Students of Medical Universities in Hanoi AreaDocument5 pagesStudying the Situation and Proposing Some Basic Solutions to Improve Psychological Harmony Between Managerial Staff and Students of Medical Universities in Hanoi AreaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Effect of Time Variables as Predictors of Senior Secondary School Students' Mathematical Performance Department of Mathematics Education Freetown PolytechnicDocument7 pagesThe Effect of Time Variables as Predictors of Senior Secondary School Students' Mathematical Performance Department of Mathematics Education Freetown PolytechnicInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Drug Dosage Control System Using Reinforcement LearningDocument8 pagesDrug Dosage Control System Using Reinforcement LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Securing Document Exchange with Blockchain Technology: A New Paradigm for Information SharingDocument4 pagesSecuring Document Exchange with Blockchain Technology: A New Paradigm for Information SharingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Enhancing the Strength of Concrete by Using Human Hairs as a FiberDocument3 pagesEnhancing the Strength of Concrete by Using Human Hairs as a FiberInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formation of New Technology in Automated Highway System in Peripheral HighwayDocument6 pagesFormation of New Technology in Automated Highway System in Peripheral HighwayInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Supply Chain 5.0: A Comprehensive Literature Review on Implications, Applications and ChallengesDocument11 pagesSupply Chain 5.0: A Comprehensive Literature Review on Implications, Applications and ChallengesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intelligent Engines: Revolutionizing Manufacturing and Supply Chains with AIDocument14 pagesIntelligent Engines: Revolutionizing Manufacturing and Supply Chains with AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Self-Disposing Contactless Motion-Activated Trash Bin Using Ultrasonic SensorsDocument7 pagesThe Making of Self-Disposing Contactless Motion-Activated Trash Bin Using Ultrasonic SensorsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Types of GraphsDocument13 pagesTypes of GraphsvanshNo ratings yet
- Chapter One Getting Started in Matlab: By: Amare KassawDocument23 pagesChapter One Getting Started in Matlab: By: Amare KassawTesfahun GirmaNo ratings yet
- M - IMP - Prestressed Hollow Core Design To Bs8110Document295 pagesM - IMP - Prestressed Hollow Core Design To Bs8110Ramon GutierrezNo ratings yet
- Geometry Transformation Guided Notes 1Document18 pagesGeometry Transformation Guided Notes 1api-287816312100% (1)
- Study of Supersonic Flow in A Constant Rate of Momentum Change PDFDocument11 pagesStudy of Supersonic Flow in A Constant Rate of Momentum Change PDFVirendra KumarNo ratings yet
- CM1 Din 2012Document248 pagesCM1 Din 2012Aurel ZimbruNo ratings yet
- Operations ResearchDocument7 pagesOperations ResearchLalit SapkaleNo ratings yet
- IGCSE-I Dec Assessment Syllabus 2023-24Document5 pagesIGCSE-I Dec Assessment Syllabus 2023-24Khadijah AbbasiNo ratings yet
- GraphMining 01 IntroductionDocument50 pagesGraphMining 01 IntroductionMaz Har UlNo ratings yet
- Visual Vocabulary of Financial TimesDocument1 pageVisual Vocabulary of Financial TimesGiovanni RabuffettiNo ratings yet
- Karnataka 2nd Puc Mathematics Board Exam Question Paper Eng Version-March 2018 PDFDocument7 pagesKarnataka 2nd Puc Mathematics Board Exam Question Paper Eng Version-March 2018 PDFVinod MNNo ratings yet
- Hands-On Exercise Oracle 10g PL SQL - v1 0Document24 pagesHands-On Exercise Oracle 10g PL SQL - v1 0pavanNo ratings yet
- NCSE Math 2018 SolutionDocument15 pagesNCSE Math 2018 SolutionDexter B50% (2)
- Teorema 15.6 - 269Document1 pageTeorema 15.6 - 269Salman AlghifaryNo ratings yet
- Commutative AlgebraDocument3 pagesCommutative AlgebraSamsul ArifinNo ratings yet
- Chapter 6Document4 pagesChapter 6ER LY Div GraceNo ratings yet
- Discrete Structure: Boolean AlgebraDocument21 pagesDiscrete Structure: Boolean AlgebraJaythoon SahibulNo ratings yet
- What is Geometric NonlinearityDocument15 pagesWhat is Geometric NonlinearityLakshman ReddyNo ratings yet
- UT Dallas Syllabus For Fin6381.001.09f Taught by Alain Bensoussan (Axb046100)Document4 pagesUT Dallas Syllabus For Fin6381.001.09f Taught by Alain Bensoussan (Axb046100)UT Dallas Provost's Technology GroupNo ratings yet
- Boldizar, J., Assessing Sex Typing and Androgyny in Children - The Children's Sex Role InventoryDocument11 pagesBoldizar, J., Assessing Sex Typing and Androgyny in Children - The Children's Sex Role InventoryGigi KentNo ratings yet
- Feedback — VIII. Neural Networks: Representation HelpDocument5 pagesFeedback — VIII. Neural Networks: Representation HelpChaitanya Kumar0% (1)
- Ingles Cronwell PDFDocument3,512 pagesIngles Cronwell PDFChristian SeminarioNo ratings yet
- Inception-V4, Inception-ResNet and The Impact of Residual Connections On LearningDocument12 pagesInception-V4, Inception-ResNet and The Impact of Residual Connections On LearningShubham ChaudharyNo ratings yet
- Optimizing Impeller Geometry For Performance Enhancement of A Centrífugal Pump PDFDocument19 pagesOptimizing Impeller Geometry For Performance Enhancement of A Centrífugal Pump PDFEnrique Javier González HenríquezNo ratings yet
- Project Floor Beam DesignDocument35 pagesProject Floor Beam DesignRoxanneDequinaNo ratings yet
- Uml2Clearquest For Extend Ibm Rational Clearquest. Transfer Uml Diagrams To Clearquest Designer'S State MachineDocument22 pagesUml2Clearquest For Extend Ibm Rational Clearquest. Transfer Uml Diagrams To Clearquest Designer'S State Machinecmconsult100% (2)
- (Reliable and Sustainable Electric Power and Energy Systems Management) Brandon Heath, Charles Tyson, John Lawhorn (Auth.), Roy Billinton, Rajesh Karki, Ajit Kumar Verma (Eds.)-Reliability and Risk EvDocument143 pages(Reliable and Sustainable Electric Power and Energy Systems Management) Brandon Heath, Charles Tyson, John Lawhorn (Auth.), Roy Billinton, Rajesh Karki, Ajit Kumar Verma (Eds.)-Reliability and Risk EvrobertomenezessNo ratings yet
- IT-UG Curriculum and SyllabusDocument257 pagesIT-UG Curriculum and SyllabusKak SakaNo ratings yet
- Water MarkingDocument24 pagesWater Markinghamed razaNo ratings yet