You might also like
- Gender and SocietyDocument6 pagesGender and SocietyMaricel RaguindinNo ratings yet
- Term 1 Standard Examination 2014 ICT Project Planning and Management - COIS20008Document19 pagesTerm 1 Standard Examination 2014 ICT Project Planning and Management - COIS20008Bree ElaineNo ratings yet
- Practical - 7 PDFDocument4 pagesPractical - 7 PDFYASH MODI100% (1)
- ECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Document18 pagesECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Eduardo FerreiraNo ratings yet
- Ijomev8n1 01 PDFDocument4 pagesIjomev8n1 01 PDFJulioCesarMohnsamNo ratings yet
- Assignment 4Document3 pagesAssignment 4Kriti GargNo ratings yet
- ECE311S: Dynamic Systems and Control Problem Set 2Document3 pagesECE311S: Dynamic Systems and Control Problem Set 2zoeeeNo ratings yet
- CF NotesDocument7 pagesCF NotesHồ Nghĩa PhươngNo ratings yet
- AMATH 231 Calculus IV Solutions A4Document6 pagesAMATH 231 Calculus IV Solutions A4Forsen ShungiteNo ratings yet
- Chapter 4 Lecture NotesDocument43 pagesChapter 4 Lecture NotespastelgorengNo ratings yet
- Assignment 7Document7 pagesAssignment 7Midhun MNo ratings yet
- Laplace Transform: 2.1 What Are Laplace Transforms, and Why?Document23 pagesLaplace Transform: 2.1 What Are Laplace Transforms, and Why?AHMED ALI S ALAHMADINo ratings yet
- Laplace - Lecture Juvgnhf LecturaDocument8 pagesLaplace - Lecture Juvgnhf LecturaHeisy MayenNo ratings yet
- Laplace TransformDocument8 pagesLaplace TransformSumangil, Maria Margarita P.No ratings yet
- Balakrishnan Green FunctionDocument5 pagesBalakrishnan Green FunctionmayankNo ratings yet
- Math221: HW# 2 Solutions: Andy Royston October 12, 2005Document12 pagesMath221: HW# 2 Solutions: Andy Royston October 12, 2005Zahid KumailNo ratings yet
- Tabla de Integrales OOODocument2 pagesTabla de Integrales OOOOmeyra Nicoll IturriNo ratings yet
- Lecture 14 LT Adv FormulaDocument4 pagesLecture 14 LT Adv Formuladev.user.1792No ratings yet
- Problem Set 1 SolutionDocument8 pagesProblem Set 1 SolutionChahat NegiNo ratings yet
- Formula SheetDocument2 pagesFormula SheetBrendanNo ratings yet
- Convolution Topic and ExampleDocument13 pagesConvolution Topic and ExampleJaved IqbalNo ratings yet
- 33 HW 8 SoluDocument3 pages33 HW 8 Soluniaselviana87No ratings yet
- 222 ED3BM1.pe21073514.Actividades EDB Dep2 TL 2022 2Document4 pages222 ED3BM1.pe21073514.Actividades EDB Dep2 TL 2022 2Flor Alejandra Piña RodriguezNo ratings yet
- Tutorial 4 LaplaceDocument3 pagesTutorial 4 Laplacenavyaa202007No ratings yet
- تحليلات 1 2 3Document27 pagesتحليلات 1 2 3توحد الأديانNo ratings yet
- FALLSEM2020-21 ECE1004 ETH VL2020210101743 Reference Material I 29-Oct-2020 Laplace TransformDocument7 pagesFALLSEM2020-21 ECE1004 ETH VL2020210101743 Reference Material I 29-Oct-2020 Laplace TransformHARJAP DANDIWALNo ratings yet
- Assignment - 3Document2 pagesAssignment - 3Gunda Venkata SaiNo ratings yet
- LT Lecture2Document17 pagesLT Lecture2Prashanna YadavNo ratings yet
- Engineering Mathematics Questions and Answers - Laplace Transform by Properties - 1Document9 pagesEngineering Mathematics Questions and Answers - Laplace Transform by Properties - 1RAHUL SOLANKENo ratings yet
- Laplace TranformDocument21 pagesLaplace TranformNguyễn QuangNo ratings yet
- L (Z f (τ) dτ = F(s) s: f (t) t-domain ˙ f (t) F (s) 1/s s-domainDocument7 pagesL (Z f (τ) dτ = F(s) s: f (t) t-domain ˙ f (t) F (s) 1/s s-domainDj OoNo ratings yet
- Solutions Shreve Chapter 5Document6 pagesSolutions Shreve Chapter 5SemenCollectorNo ratings yet
- A Mathematical Model For Enzyme Kinetics: Multiple Timescales AnalysisDocument9 pagesA Mathematical Model For Enzyme Kinetics: Multiple Timescales AnalysisMaria AnghelacheNo ratings yet
- Math2065: Intro To Pdes Tutorial Questions (Week 4)Document2 pagesMath2065: Intro To Pdes Tutorial Questions (Week 4)TOM DAVISNo ratings yet
- sns 2021 기말 (온라인)Document2 pagessns 2021 기말 (온라인)juyeons0204No ratings yet
- TC Asgn3-1Document2 pagesTC Asgn3-1Pradnya UkeyNo ratings yet
- Section 13.2 Derivatives and Integrals of Vector FunctionsDocument3 pagesSection 13.2 Derivatives and Integrals of Vector FunctionsAlvin AdityaNo ratings yet
- Probability Theory Notes Chapter 2 VaradhanDocument20 pagesProbability Theory Notes Chapter 2 VaradhanJimmyNo ratings yet
- Chapter (1) Laplace TransformDocument28 pagesChapter (1) Laplace TransformMohammed NabilNo ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- Werner, Raab - The Truth of Riemann HypothesisDocument11 pagesWerner, Raab - The Truth of Riemann HypothesisJulie KalpoNo ratings yet
- Chapter 3: Laplace Transform: FT FsDocument29 pagesChapter 3: Laplace Transform: FT FsTekdNo ratings yet
- Revision Notes On Laplace Transforms: 1. Finding Inverse Transforms Using Partial FractionsDocument2 pagesRevision Notes On Laplace Transforms: 1. Finding Inverse Transforms Using Partial FractionsdivNo ratings yet
- 1 Unit Step Function U (T)Document6 pages1 Unit Step Function U (T)Tushar Ghosh100% (1)
- Laplace TransformsDocument10 pagesLaplace Transformsgnhlanhla98No ratings yet
- EEE 303 HW # 1 SolutionsDocument22 pagesEEE 303 HW # 1 SolutionsDhirendra Kumar SinghNo ratings yet
- Laplace Transform 1Document5 pagesLaplace Transform 1ifiokNo ratings yet
- Anthony Vaccaro MATH 264 Winter 2023 Assignment Assignment 6 Due 03/12/2023 at 11:59pm EDTDocument1 pageAnthony Vaccaro MATH 264 Winter 2023 Assignment Assignment 6 Due 03/12/2023 at 11:59pm EDTAnthony VaccaroNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument3 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- TC Asgn1 SolutionDocument4 pagesTC Asgn1 SolutionRiya KoretiNo ratings yet
- Fourier SeriesDocument2 pagesFourier SeriesSauvik Chatterjee100% (1)
- Week 2Document12 pagesWeek 2Hassan El SayedNo ratings yet
- Laplace Transform TableDocument2 pagesLaplace Transform TableSuksmatatya ParamestiNo ratings yet
- Assigment 1Document12 pagesAssigment 1Abhinav PradeepNo ratings yet
- AB2.9: Unit Step Function. Second Shifting Theorem. Dirac's Delta FunctionDocument13 pagesAB2.9: Unit Step Function. Second Shifting Theorem. Dirac's Delta Functionمحمد احمدNo ratings yet
- MATH2352 Differential Equations and Applications Tutorial Notes 5Document4 pagesMATH2352 Differential Equations and Applications Tutorial Notes 5John ChanNo ratings yet
- Week 12 SolutionsDocument3 pagesWeek 12 SolutionsjohnpaulshobayanNo ratings yet
- Notes LT3Document16 pagesNotes LT3osmanfıratNo ratings yet
- The Fourier Series of A Periodic FunctionDocument26 pagesThe Fourier Series of A Periodic FunctionMahalakshmiSaravanaNo ratings yet
- Finansmatte FSDocument1 pageFinansmatte FSGustav HägglundNo ratings yet
- WIN SEM (2023-24) FRESHERS - MAT1002 - TH - AP2023247000225 - 2024-02-29 - Reference-Material-IDocument18 pagesWIN SEM (2023-24) FRESHERS - MAT1002 - TH - AP2023247000225 - 2024-02-29 - Reference-Material-Ikotarajasri005No ratings yet
- Tutorial Sheet 3Document2 pagesTutorial Sheet 3yash sononeNo ratings yet
- Answer Selected Answer: Correct Answer:: 2.5 Out of 2.5 PointsDocument9 pagesAnswer Selected Answer: Correct Answer:: 2.5 Out of 2.5 PointsBree ElaineNo ratings yet
- CH 7Document6 pagesCH 7Bree ElaineNo ratings yet
- CH 7 pt2Document6 pagesCH 7 pt2Bree ElaineNo ratings yet
- CH 10 QuestionsDocument5 pagesCH 10 QuestionsBree ElaineNo ratings yet
- CH 6Document4 pagesCH 6Bree ElaineNo ratings yet
- A. 2NF C. 4NF D. 5NFDocument21 pagesA. 2NF C. 4NF D. 5NFBree ElaineNo ratings yet
- Assignment 1Document3 pagesAssignment 1Bree ElaineNo ratings yet
- CH 6 pt2Document4 pagesCH 6 pt2Bree ElaineNo ratings yet
- Assignment 8Document2 pagesAssignment 8Bree ElaineNo ratings yet
- CQ Exam 2016Document25 pagesCQ Exam 2016Bree ElaineNo ratings yet
- CQ Univ Exam 2016Document14 pagesCQ Univ Exam 2016Bree ElaineNo ratings yet
- Chapter 10 Review Questions and ExercisesDocument5 pagesChapter 10 Review Questions and ExercisesBree ElaineNo ratings yet
- Math 2280 - Assignment 10: Dylan Zwick Spring 2014Document19 pagesMath 2280 - Assignment 10: Dylan Zwick Spring 2014Bree ElaineNo ratings yet
- Project CharterDocument17 pagesProject CharterBree ElaineNo ratings yet
- Math 2280 - Assignment 10: Dylan Zwick Spring 2014Document19 pagesMath 2280 - Assignment 10: Dylan Zwick Spring 2014Bree ElaineNo ratings yet
- MIS462-01 Exam #1 Study Questions: 1. A ProjectDocument24 pagesMIS462-01 Exam #1 Study Questions: 1. A ProjectBree ElaineNo ratings yet
- DocxDocument7 pagesDocxBree ElaineNo ratings yet
- Swot of A New ICT Service 11a6mylDocument17 pagesSwot of A New ICT Service 11a6mylBree ElaineNo ratings yet
- Review Test Submission: Practice QuizDocument17 pagesReview Test Submission: Practice QuizBree ElaineNo ratings yet
- Practice ScenariosDocument4 pagesPractice ScenariosBree ElaineNo ratings yet
- ITC548 Sample ExamDocument6 pagesITC548 Sample ExamBree ElaineNo ratings yet
- BRL Oracle Security WP Dec 13Document8 pagesBRL Oracle Security WP Dec 13Bree ElaineNo ratings yet
- Refresher Course Math: 1050 and 1060 Practice Problems Set 6Document2 pagesRefresher Course Math: 1050 and 1060 Practice Problems Set 6Bree ElaineNo ratings yet
- Refresher Course Math 1050 and 1060 Practice Problems Set 7 Fall 2007 +2Document4 pagesRefresher Course Math 1050 and 1060 Practice Problems Set 7 Fall 2007 +2Bree ElaineNo ratings yet
- Math 10 Quiz SolutionsDocument8 pagesMath 10 Quiz SolutionsBree ElaineNo ratings yet
- Problem Set 2Document6 pagesProblem Set 2Bree ElaineNo ratings yet
- Statistical Mini-ResearchDocument65 pagesStatistical Mini-ResearchJean DelaNo ratings yet
- When Mystery Shopping Goes BadDocument4 pagesWhen Mystery Shopping Goes BadEric LarseNo ratings yet
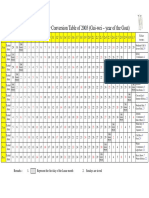
- Gregorian-Lunar Calendar Conversion Table of 2003 (Gui-Wei - Year of The Goat)Document1 pageGregorian-Lunar Calendar Conversion Table of 2003 (Gui-Wei - Year of The Goat)I Am Geprek Bensu FinanceNo ratings yet
- Nexys4™ PDM Filter Project: Revised February 3, 2014 This Manual Applies To The Nexys4 Rev. BDocument12 pagesNexys4™ PDM Filter Project: Revised February 3, 2014 This Manual Applies To The Nexys4 Rev. Bvidhya dsNo ratings yet
- Photometric Design White PaperDocument5 pagesPhotometric Design White PaperScott VokeyNo ratings yet
- Machining of Composites PPT2Document10 pagesMachining of Composites PPT2Arshi ChorghayNo ratings yet
- Alignment TolerancesDocument7 pagesAlignment TolerancesFarhan MalekNo ratings yet
- Boiler Feed PumpDocument32 pagesBoiler Feed PumpAli Bari100% (1)
- Rockfon Medicare Standard: DatasheetDocument4 pagesRockfon Medicare Standard: Datasheetאורלי בן יוסףNo ratings yet
- Task WarriorDocument2 pagesTask WarriorLuke Oliver RitchieNo ratings yet
- Test10 Math6-1Document18 pagesTest10 Math6-1Jerry DNo ratings yet
- 2.2 Packing Handling & StorageDocument18 pages2.2 Packing Handling & StoragehamzahNo ratings yet
- X-Series: Installation Information Emg Model: 89-XDocument4 pagesX-Series: Installation Information Emg Model: 89-XM. S.No ratings yet
- Foundation For Innovators in Science and Technology A NIDHI-TBI Funded by DST, Govt. of IndiaDocument2 pagesFoundation For Innovators in Science and Technology A NIDHI-TBI Funded by DST, Govt. of Indiajal detect drilling solutionNo ratings yet
- CD47-C USER GUIDE - 06 APR 2016 - EmailDocument60 pagesCD47-C USER GUIDE - 06 APR 2016 - EmailRakesh KannurNo ratings yet
- Sarah Amir Envir Sci 2020 Iiui Isb PRRDocument221 pagesSarah Amir Envir Sci 2020 Iiui Isb PRRGhulam Hassan AskariNo ratings yet
- RetrieveDocument9 pagesRetrieveCitlali Castillo C.No ratings yet
- Examiners' Reports 2018: LA3014 Conflict of LawsDocument9 pagesExaminers' Reports 2018: LA3014 Conflict of LawsShamil HabibNo ratings yet
- The Internet of ThingsDocument3 pagesThe Internet of Thingsmanh huuNo ratings yet
- CFD Modeling and Control of A Steam Methane Reforming ReactorDocument64 pagesCFD Modeling and Control of A Steam Methane Reforming ReactorperulesNo ratings yet
- Ect204 Signals and Systems, July 2021Document4 pagesEct204 Signals and Systems, July 2021Sourav SethuNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityRace VinDieselNo ratings yet
- Report Cards - Middle Years and SecondaryDocument3 pagesReport Cards - Middle Years and SecondaryAtomicYellowNo ratings yet
- Examen Práctico Oposición Inglés Secundaria Murcia 2018Document6 pagesExamen Práctico Oposición Inglés Secundaria Murcia 2018JonNo ratings yet
- ProjectReport (ANIL) PDFDocument205 pagesProjectReport (ANIL) PDFPawan NegiNo ratings yet
- 1106A-70TAG2 ElectropaK PN3054Document2 pages1106A-70TAG2 ElectropaK PN3054Md ShNo ratings yet
- NSTP SyllabusDocument11 pagesNSTP Syllabusrpd2023-5385-41870No ratings yet
- Ten PiecesDocument12 pagesTen PiecesSergio Bono Felix100% (1)