You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Golden Dawn Correspondence Lessons 151Document27 pagesGolden Dawn Correspondence Lessons 151F_RC100% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Work, Kinetic Energy and Potential EnergyDocument28 pagesWork, Kinetic Energy and Potential EnergyMaey AkimNo ratings yet
- DLP Science 11Document3 pagesDLP Science 11Zenie Nacion Pactol100% (1)
- DLP PS 48 Ma. Elizabeth S. AraraoDocument4 pagesDLP PS 48 Ma. Elizabeth S. AraraoJose Benavente100% (1)
- High Dive SummaryDocument14 pagesHigh Dive Summarysoadquake98188% (8)
- Science 8 - 1st Monthly TestDocument3 pagesScience 8 - 1st Monthly TestMaria Jocosa100% (1)
- Types of ForcesDocument6 pagesTypes of ForcesMariquit M. LopezNo ratings yet
- Physics Lec 33 HeatandEnergyDocument20 pagesPhysics Lec 33 HeatandEnergyAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 31 KineticTheoryGasesDocument22 pagesPhysics Lec 31 KineticTheoryGasesAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 24 MoreStaticsDocument11 pagesPhysics Lec 24 MoreStaticsAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Simple Harmonic Motion: Physics 1425 Lecture 28Document15 pagesSimple Harmonic Motion: Physics 1425 Lecture 28Anthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 27 HydrodynamicsDocument12 pagesPhysics Lec 27 HydrodynamicsAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Damped and Driven Harmonic Motion: Physics 1425 Lecture 29Document13 pagesDamped and Driven Harmonic Motion: Physics 1425 Lecture 29Anthony Wijaya, S.Pd., M.Si.No ratings yet
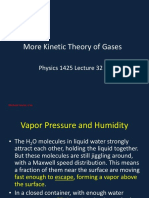
- Physics Lec 32 MoreKineticTheoryDocument23 pagesPhysics Lec 32 MoreKineticTheoryAnthony Wijaya, S.Pd., M.Si.No ratings yet
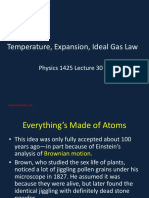
- Temperature, Expansion, Ideal Gas Law: Physics 1425 Lecture 30Document21 pagesTemperature, Expansion, Ideal Gas Law: Physics 1425 Lecture 30Anthony Wijaya, S.Pd., M.Si.No ratings yet
- More Angular Momentum: Physics 1425 Lecture 22Document16 pagesMore Angular Momentum: Physics 1425 Lecture 22Anthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 20 MoreRotationalDynamicsDocument16 pagesPhysics Lec 20 MoreRotationalDynamicsAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 16 MoreAboutMomentumDocument19 pagesPhysics Lec 16 MoreAboutMomentumAnthony Wijaya, S.Pd., M.Si.No ratings yet
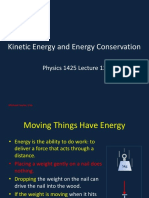
- Kinetic Energy and Energy Conservation: Physics 1425 Lecture 13Document14 pagesKinetic Energy and Energy Conservation: Physics 1425 Lecture 13Anthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 17 CenterOfMassEtcDocument9 pagesPhysics Lec 17 CenterOfMassEtcAnthony Wijaya, S.Pd., M.Si.No ratings yet
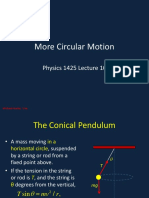
- Physics Lec 10 MoreCircularMotionDocument14 pagesPhysics Lec 10 MoreCircularMotionAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 15 MomentumDocument12 pagesPhysics Lec 15 MomentumAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 09 CircularMotionDocument21 pagesPhysics Lec 09 CircularMotionAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 07 UsingNewtonsLawsDocument13 pagesPhysics Lec 07 UsingNewtonsLawsAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 06 NewtonDocument19 pagesPhysics Lec 06 NewtonAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Friction: Physics 1425 Lecture 8Document8 pagesFriction: Physics 1425 Lecture 8Anthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 04 2D MotionDocument17 pagesPhysics Lec 04 2D MotionAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 05 ProjectilesDocument12 pagesPhysics Lec 05 ProjectilesAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics Lec 03 FallingDocument17 pagesPhysics Lec 03 FallingAnthony Wijaya, S.Pd., M.Si.No ratings yet
- One-Dimensional Motion: Displacement, Velocity, AccelerationDocument19 pagesOne-Dimensional Motion: Displacement, Velocity, AccelerationAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Physics 1425: General Physics I: Michael FowlerDocument21 pagesPhysics 1425: General Physics I: Michael FowlerAnthony Wijaya, S.Pd., M.Si.No ratings yet
- Investigating The Parameters of Circular OrbitsDocument4 pagesInvestigating The Parameters of Circular OrbitsBurritoNo ratings yet
- Basics of MechanicsDocument132 pagesBasics of MechanicsSuresh KumarNo ratings yet
- Chapter 8 (Rotational Motion)Document37 pagesChapter 8 (Rotational Motion)Mehwish IsrarNo ratings yet
- 2.1 Vectors and ScalarsDocument6 pages2.1 Vectors and ScalarsPaula ZofioNo ratings yet
- 3D Geometry BasicsDocument9 pages3D Geometry Basicsmath2727No ratings yet
- Expt Projectile MotionDocument6 pagesExpt Projectile MotionGeorgette RepunteNo ratings yet
- Physics Exam Questions2Document2 pagesPhysics Exam Questions2Amrita100% (1)
- Sample Problem in PhysicsDocument28 pagesSample Problem in PhysicsjulietNo ratings yet
- 1st Yr Hy 09Document4 pages1st Yr Hy 09Grezzju CauchiNo ratings yet
- 6 Plane Containing Two LinesDocument1 page6 Plane Containing Two LinesPurisai Rajamani KumarNo ratings yet
- Theories About The Origin of The UniverseDocument5 pagesTheories About The Origin of The UniverseJasmine MaturanNo ratings yet
- Laporan Praktikum Piks-134-149Document16 pagesLaporan Praktikum Piks-134-149pulungNo ratings yet
- Solutions To The Problems On Velocity and Speed of Moving ObjectsDocument8 pagesSolutions To The Problems On Velocity and Speed of Moving ObjectsMichelle Diaz DonaireNo ratings yet
- 1the Three-Dimensional Coordinate SystemDocument140 pages1the Three-Dimensional Coordinate SystemHasan DokuzerNo ratings yet
- Kinematics Chapter 2Document2 pagesKinematics Chapter 2Mohsin MughalNo ratings yet
- Forces Motion VocabDocument15 pagesForces Motion VocabEDWARD TORRES-BALDERASNo ratings yet
- Hw3 - 2016 Flight MechanicsDocument2 pagesHw3 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- Speed & VelocityDocument8 pagesSpeed & VelocityDaniel BerryNo ratings yet
- Skycan 86730 UsMan (EN)Document7 pagesSkycan 86730 UsMan (EN)Gisell ZapataNo ratings yet
- STD-09 CBSE CH-8 Graphical Representation of Motion (Velocity-Time Graph) WORKSHEET-2021 4Document4 pagesSTD-09 CBSE CH-8 Graphical Representation of Motion (Velocity-Time Graph) WORKSHEET-2021 4Taksh KapatelNo ratings yet
- Las Law of Universal GravitationDocument7 pagesLas Law of Universal GravitationFernadez RodisonNo ratings yet
- Average Speed Total Distance Total Time Distance Time Distance 8 SDocument8 pagesAverage Speed Total Distance Total Time Distance Time Distance 8 SRajesh MumtazNo ratings yet
- Review Quasinormal Modes.Document114 pagesReview Quasinormal Modes.Alfonso SolisNo ratings yet