You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- B767 200-300 BOOK 23 101 - CommunicationsDocument39 pagesB767 200-300 BOOK 23 101 - CommunicationsTarik BenzinebNo ratings yet
- AC IGBT Drive System For Draglines - Nov 06Document87 pagesAC IGBT Drive System For Draglines - Nov 06ghalas100% (1)
- Linear Summing and Non-Linear MixingDocument14 pagesLinear Summing and Non-Linear MixingErven UmbaoNo ratings yet
- Ammeter, Voltmeter Testing Not Applicable For This PanelDocument3 pagesAmmeter, Voltmeter Testing Not Applicable For This Paneleswaran005No ratings yet
- Payment Break Down For Electrical WorkDocument1 pagePayment Break Down For Electrical WorkSharique BaigNo ratings yet
- Fen 04447 2S 2018 2Document4 pagesFen 04447 2S 2018 2Francisco Reis FarfilhoNo ratings yet
- CT Sizing For Generator and Transformer Protective RelaysDocument7 pagesCT Sizing For Generator and Transformer Protective RelaysFrancisco Reis FarfilhoNo ratings yet
- Distance Relay Performance Evaluation OnDocument12 pagesDistance Relay Performance Evaluation OnFrancisco Reis FarfilhoNo ratings yet
- Case Study: Adaptive Load Shedding in Critical Industrial FacilitiesDocument7 pagesCase Study: Adaptive Load Shedding in Critical Industrial FacilitiesFrancisco Reis FarfilhoNo ratings yet
- 6951 NewDigitalFilter VM 20200108 WebDocument7 pages6951 NewDigitalFilter VM 20200108 WebFrancisco Reis FarfilhoNo ratings yet
- OOPS, Out-of-Phase Synchronization: Duke Energy Schweitzer Engineering Laboratories, IncDocument11 pagesOOPS, Out-of-Phase Synchronization: Duke Energy Schweitzer Engineering Laboratories, IncFrancisco Reis FarfilhoNo ratings yet
- Trab - Publicado - 1.10Document6 pagesTrab - Publicado - 1.10Francisco Reis FarfilhoNo ratings yet
- Power System Protection ManualDocument32 pagesPower System Protection ManualFrancisco Reis FarfilhoNo ratings yet
- Ta 8445 KDocument7 pagesTa 8445 KJose M PeresNo ratings yet
- SC Chapter 17 - Power Supply RegulationDocument34 pagesSC Chapter 17 - Power Supply RegulationlornfateNo ratings yet
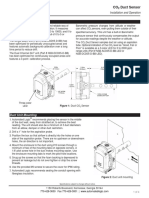
- ALC-28173-CO2 Duct SensorDocument4 pagesALC-28173-CO2 Duct Sensorusgl-scbd3639No ratings yet
- 3.2transmitters Guided Wave Radar 706xxxDocument58 pages3.2transmitters Guided Wave Radar 706xxxQuy le manhNo ratings yet
- What Is Altera Quartus Used ForDocument9 pagesWhat Is Altera Quartus Used ForjackNo ratings yet
- XGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFDocument1,322 pagesXGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFJaka SimonicNo ratings yet
- ATV12 Modbus Communication Manual 2009Document25 pagesATV12 Modbus Communication Manual 2009Jonny Luciano FernandezNo ratings yet
- Mobile Computing QuestionDocument5 pagesMobile Computing QuestionBalaji SelvarajNo ratings yet
- Morko, Isaac KwemburDocument80 pagesMorko, Isaac Kwembura durgadeviNo ratings yet
- s8050 PDFDocument2 pagess8050 PDFAckerman RinconNo ratings yet
- PV2 - Student KitDocument14 pagesPV2 - Student KitNadiah NasirNo ratings yet
- ALSTOM Relay CatalogueDocument8 pagesALSTOM Relay CatalogueHung Cuong PhamNo ratings yet
- Ov 7670Document5 pagesOv 7670Je AnNo ratings yet
- Security Patrolling Robot: Major Project Presentation OnDocument14 pagesSecurity Patrolling Robot: Major Project Presentation OnEdu Cat100% (1)
- BLWV 10Document132 pagesBLWV 10Edouard Francis Dufour DarbellayNo ratings yet
- User's Manual Manual Del UsuarioDocument46 pagesUser's Manual Manual Del UsuarioAntonio Rodrigues LamarcaProAudioNo ratings yet
- 475-20 Users ManualDocument26 pages475-20 Users ManualMilton HernandezNo ratings yet
- BA112Document4 pagesBA112Miguel pazNo ratings yet
- ARM - Module 1Document67 pagesARM - Module 1Somashekar KrishnappaNo ratings yet
- G31MX 2.0 Series MotherboardDocument76 pagesG31MX 2.0 Series MotherboardferfersegNo ratings yet
- Bav21 Diodes (Fairchild)Document4 pagesBav21 Diodes (Fairchild)Andres AlegriaNo ratings yet
- Construction of Reflex KlystronDocument3 pagesConstruction of Reflex KlystronJanga MaheswarreddyNo ratings yet
- Service Manual VR01BDocument43 pagesService Manual VR01BLindomar ChavesNo ratings yet
- Bee Lab Manual Printing PDFDocument59 pagesBee Lab Manual Printing PDFVispendra SinghNo ratings yet
- User Manual 322 ManualDocument19 pagesUser Manual 322 ManualAliNo ratings yet