You might also like
- Robot Programming PDFDocument72 pagesRobot Programming PDFAswath Sridhar100% (2)
- Words of Radiance: Book Two of The Stormlight Archive - Brandon SandersonDocument6 pagesWords of Radiance: Book Two of The Stormlight Archive - Brandon Sandersonxyrytepa0% (3)
- Inspección, Pruebas, Y Mantenimiento de Gabinetes de Ataque Rápido E HidrantesDocument3 pagesInspección, Pruebas, Y Mantenimiento de Gabinetes de Ataque Rápido E HidrantesVICTOR RALPH FLORES GUILLENNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Denso Robot Training PDFDocument46 pagesDenso Robot Training PDFJuan MoralesNo ratings yet
- Principles of SCADA-system Development - 2018Document4 pagesPrinciples of SCADA-system Development - 2018Juan CamiloNo ratings yet
- Chapter 4 - PLC ProgrammingDocument75 pagesChapter 4 - PLC ProgrammingYazid Ismail0% (1)
- Institutional Group Agencies For EducationDocument22 pagesInstitutional Group Agencies For EducationGlory Aroma100% (1)
- PCS110 eDocument136 pagesPCS110 eAli100% (2)
- 2D Robot Vision System Robot Connection Manual (FANUC Edition)Document17 pages2D Robot Vision System Robot Connection Manual (FANUC Edition)emmanuel baezNo ratings yet
- Noise and DB Calculations: Smart EDGE ECE Review SpecialistDocument2 pagesNoise and DB Calculations: Smart EDGE ECE Review SpecialistLM BecinaNo ratings yet
- Chapter 4 - PLC PROGRAMMINGDocument71 pagesChapter 4 - PLC PROGRAMMINGMuhd Daniel FarhanNo ratings yet
- Aiet MPDocument64 pagesAiet MPkmpshastryNo ratings yet
- Iecon2018 v2Document6 pagesIecon2018 v2sergioNo ratings yet
- CH03-COA10e ComputerFunctionDocument20 pagesCH03-COA10e ComputerFunctionthuan phamNo ratings yet
- Interesting Applications of Atmel AVR MicrocontrollersDocument8 pagesInteresting Applications of Atmel AVR Microcontrollersnguyenvank51No ratings yet
- Motion PlanningDocument97 pagesMotion PlanningVishnu PriyanNo ratings yet
- 11 EASY ROB Chapter 09Document28 pages11 EASY ROB Chapter 09api-3714448No ratings yet
- Scorbot IntroDocument11 pagesScorbot IntroHeber AlmeidaNo ratings yet
- X04-Industrial Robot Programming - Lab ManualDocument9 pagesX04-Industrial Robot Programming - Lab ManualMahesh Nvsr BNo ratings yet
- Ese Comau-GTDocument13 pagesEse Comau-GTMUHAMMAD USMAN KhalidNo ratings yet
- RSI-Interface R-30iB PlusDocument10 pagesRSI-Interface R-30iB PlusxNo ratings yet
- Application Program Interface (API) : API-INV - Inverse KinematicsDocument8 pagesApplication Program Interface (API) : API-INV - Inverse KinematicsChandru ChristurajNo ratings yet
- Fuad MahfudiantoDocument17 pagesFuad MahfudiantoFuad EngineNo ratings yet
- 451236ijsetr1152 317Document6 pages451236ijsetr1152 317yugioh beeNo ratings yet
- Es100 141 JXCP1Document34 pagesEs100 141 JXCP1hamidreza.amiriNo ratings yet
- EE 319K Introduction To Microcontrollers: Lecture 1: Introduction, Embedded Sys, Product Life-Cycle, 9S12 ProgrammingDocument13 pagesEE 319K Introduction To Microcontrollers: Lecture 1: Introduction, Embedded Sys, Product Life-Cycle, 9S12 ProgrammingFreya OlamitNo ratings yet
- iTNC 530: User's Manual Cycle ProgrammingDocument513 pagesiTNC 530: User's Manual Cycle ProgrammingIvkraNo ratings yet
- Datos A Tomar en CuentaDocument18 pagesDatos A Tomar en CuentaEkenlat Aeterna TenebrisNo ratings yet
- Spark V Atmega16 Software ManualDocument62 pagesSpark V Atmega16 Software ManualyogeshNo ratings yet
- 9.10 TCPM Function (Software Option 2)Document5 pages9.10 TCPM Function (Software Option 2)Rudra DasNo ratings yet
- Pic Based LockDocument5 pagesPic Based LockamshahidNo ratings yet
- User Manual Itnc 530 670 - 388-22Document525 pagesUser Manual Itnc 530 670 - 388-22JAMES JUDYNo ratings yet
- Sub Operator Panel / SOP Remote Operator Panel / ROPDocument18 pagesSub Operator Panel / SOP Remote Operator Panel / ROPEduardoNo ratings yet
- Centroid v3.16 Lathe Operator ManualDocument239 pagesCentroid v3.16 Lathe Operator ManualpachecoNo ratings yet
- TNC 370 Gcode User ManualDocument260 pagesTNC 370 Gcode User ManualJames theorbtwo MastrosNo ratings yet
- ITNC 530 Cycle ProgammingDocument527 pagesITNC 530 Cycle ProgammingRahulNo ratings yet
- TNC 370Document333 pagesTNC 370Олександр СапаровNo ratings yet
- Preparation For MidtermDocument30 pagesPreparation For MidtermTNo ratings yet
- Point To PointDocument7 pagesPoint To PointKaarthikrubanNo ratings yet
- Dr. Mohanad A. Shehab & Dr. Tariq Mohamad Lecture1. MICROPROCESSOR vs. MicrocontrollerDocument4 pagesDr. Mohanad A. Shehab & Dr. Tariq Mohamad Lecture1. MICROPROCESSOR vs. MicrocontrollerAmmar AlkindyNo ratings yet
- University Institute of Engineering (Uie) Department Cse: Soft ComputingDocument35 pagesUniversity Institute of Engineering (Uie) Department Cse: Soft ComputingmanuNo ratings yet
- Co Unit-3@mpcuDocument69 pagesCo Unit-3@mpcuGnana Deepika MeduriNo ratings yet
- Hev Traction DrivesDocument11 pagesHev Traction Drivesarmin2005No ratings yet
- Polling Free RTOS and ADCDocument8 pagesPolling Free RTOS and ADCNikhil DeshmukhNo ratings yet
- Design of SW Architecture For PLC Integrated Robot: Ho Seok Jeong, Sang Hoon Ji, Heung Sang Jung, and Ja Choon KooDocument3 pagesDesign of SW Architecture For PLC Integrated Robot: Ho Seok Jeong, Sang Hoon Ji, Heung Sang Jung, and Ja Choon KooRLNo ratings yet
- Unit 5 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument7 pagesUnit 5 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONNo ratings yet
- CNC Block DiagramDocument8 pagesCNC Block DiagramMohamed AtifNo ratings yet
- U5EP2. Practice Report of Programming of An Industrial RobotDocument4 pagesU5EP2. Practice Report of Programming of An Industrial RobotJESSICA BERENICE SANDOVAL REYESNo ratings yet
- CS 152 Computer Architecture and Engineering Multicycle Controller DesignDocument49 pagesCS 152 Computer Architecture and Engineering Multicycle Controller DesignShivam KumarNo ratings yet
- Catalog A00013EpanasonicDocument24 pagesCatalog A00013EpanasonicMantención FastpackNo ratings yet
- The Programming Language RAPIDDocument16 pagesThe Programming Language RAPIDCamilo HerreraNo ratings yet
- Unit 1 MPUOrganizationDocument90 pagesUnit 1 MPUOrganizationspam.me.adiNo ratings yet
- Delta CODESYS-based Robotics 20230704Document34 pagesDelta CODESYS-based Robotics 20230704vanecuciNo ratings yet
- Unit 3 Basic Processing UnitDocument86 pagesUnit 3 Basic Processing UnitRishitNo ratings yet
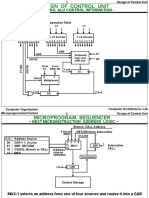
- Design of Control Unit: - Decoding Alu Control InformationDocument4 pagesDesign of Control Unit: - Decoding Alu Control InformationDawood MaNo ratings yet
- Programmable Logic Controller (PLC)Document4 pagesProgrammable Logic Controller (PLC)RubayaNo ratings yet
- Fuji Inverter ManuDocument116 pagesFuji Inverter ManuBrahim CherguiNo ratings yet
- Chilton - ACL - SCFOR - Fortran Graphics System For The SC4020Document6 pagesChilton - ACL - SCFOR - Fortran Graphics System For The SC4020ciuciu.denis.2023No ratings yet
- 3638 Exercice Verin FlowcodeDocument7 pages3638 Exercice Verin FlowcodeSaid AhnicheNo ratings yet
- ATV600 - Communication Parameters: WarningDocument41 pagesATV600 - Communication Parameters: WarningMaycon DouglasNo ratings yet
- Editing and Simulation of Robot Program On PC: Production Management FunctionDocument1 pageEditing and Simulation of Robot Program On PC: Production Management FunctionPKO SU112No ratings yet
- Software enDocument9 pagesSoftware enAxetoineNo ratings yet
- Genuine Fakes: How Phony Things Teach Us About Real StuffDocument2 pagesGenuine Fakes: How Phony Things Teach Us About Real StuffGail LeondarWrightNo ratings yet
- Active Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023Document119 pagesActive Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023jagdeepchkNo ratings yet
- Magic Bullet Theory - PPTDocument5 pagesMagic Bullet Theory - PPTThe Bengal ChariotNo ratings yet
- KDE11SSDocument2 pagesKDE11SSluisgomezpasion1No ratings yet
- Information Systems and Supply Chain ManagementDocument2 pagesInformation Systems and Supply Chain Managementvipinkandpal86No ratings yet
- XII CS Material Chap7 2012 13Document21 pagesXII CS Material Chap7 2012 13Ashis PradhanNo ratings yet
- Culture 2007 2013 Projects Overview 2018-03-18Document133 pagesCulture 2007 2013 Projects Overview 2018-03-18PontesDeboraNo ratings yet
- A Literature Review of Retailing Sector and BusineDocument21 pagesA Literature Review of Retailing Sector and BusineSid MichaelNo ratings yet
- 25 Middlegame Concepts Every Chess Player Must KnowDocument2 pages25 Middlegame Concepts Every Chess Player Must KnowKasparicoNo ratings yet
- PD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsDocument20 pagesPD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsHazel Jael HernandezNo ratings yet
- Nantai Catalog NewDocument30 pagesNantai Catalog Newspalomos100% (1)
- Perdarahan Uterus AbnormalDocument15 pagesPerdarahan Uterus Abnormalarfiah100% (1)
- Enlightened ExperimentationDocument8 pagesEnlightened ExperimentationRaeed HassanNo ratings yet
- I. Learning Objectives / Learning Outcomes: Esson LANDocument3 pagesI. Learning Objectives / Learning Outcomes: Esson LANWilliams M. Gamarra ArateaNo ratings yet
- Mathmatcs Joint Form TwoDocument11 pagesMathmatcs Joint Form TwoNurudi jumaNo ratings yet
- Full Project LibraryDocument77 pagesFull Project LibraryChala Geta0% (1)
- SPC FD 00 G00 Part 03 of 12 Division 06 07Document236 pagesSPC FD 00 G00 Part 03 of 12 Division 06 07marco.w.orascomNo ratings yet
- Imabalacat DocuDocument114 pagesImabalacat DocuJänrëýMåmårìlSälängsàngNo ratings yet
- Carnegie Mellon Thesis RepositoryDocument4 pagesCarnegie Mellon Thesis Repositoryalisonreedphoenix100% (2)
- Sample CVFormat 1Document2 pagesSample CVFormat 1subham.sharmaNo ratings yet
- Dating Apps MDocument2 pagesDating Apps Mtuanhmt040604No ratings yet
- GPP Calendar of Activities 2022 23 SdoDocument5 pagesGPP Calendar of Activities 2022 23 SdoRomel GarciaNo ratings yet
- Universal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukDocument3 pagesUniversal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukPhilip EgyNo ratings yet
- PostScript Quick ReferenceDocument2 pagesPostScript Quick ReferenceSneetsher CrispyNo ratings yet
- Origin ManualDocument186 pagesOrigin ManualmariaNo ratings yet
- Educationusa 2022globalguide Final Reduced SizeDocument84 pagesEducationusa 2022globalguide Final Reduced SizeAnna ModebadzeNo ratings yet