You might also like
- RTSys Lecture Note - Ch04 Clock-Driven SchedulingDocument24 pagesRTSys Lecture Note - Ch04 Clock-Driven Schedulingسام السبئيNo ratings yet
- Clock Driven 1 PDFDocument48 pagesClock Driven 1 PDFMr. Samadhan MahaleNo ratings yet
- RTOS Exam Answer Key for Software Engineering ProgramDocument5 pagesRTOS Exam Answer Key for Software Engineering Programneetika guptaNo ratings yet
- Deadline First Algorithm - DerejeDocument60 pagesDeadline First Algorithm - DerejeDarajjee DhufeeraaNo ratings yet
- Unit 2 Clock-Driven Scheduling: 5.1 Notations and AssumptionsDocument18 pagesUnit 2 Clock-Driven Scheduling: 5.1 Notations and Assumptions一鸿No ratings yet
- The Limited Preemption Uniprocessor Scheduling of Sporadic Task SystemsDocument23 pagesThe Limited Preemption Uniprocessor Scheduling of Sporadic Task SystemsAnuvratSinghNo ratings yet
- Clock-Driven Scheduling: Notations and AssumptionsDocument11 pagesClock-Driven Scheduling: Notations and Assumptionsnimarose 11No ratings yet
- 07 Clock Driven SchedulingDocument25 pages07 Clock Driven SchedulingMuktikanta SahuNo ratings yet
- Edf PDFDocument60 pagesEdf PDFNSNo ratings yet
- Task Scheduling Basics ExplainedDocument26 pagesTask Scheduling Basics ExplainedNasir WaheedNo ratings yet
- SchedulingDocument55 pagesSchedulingMohan RajNo ratings yet
- Priority Inheritance and Priority Ceiling ProtocolsDocument25 pagesPriority Inheritance and Priority Ceiling Protocolsasd1080No ratings yet
- Clock-Driven SchedulingDocument5 pagesClock-Driven Schedulingneetika guptaNo ratings yet
- Exercise 4 - Introduction To Embedded SystemsDocument3 pagesExercise 4 - Introduction To Embedded Systemsquoctrung244No ratings yet
- Lec 11Document52 pagesLec 11pranavjibhakateNo ratings yet
- Lecture - Asymptotic Complexity and Abstract Data TypesDocument35 pagesLecture - Asymptotic Complexity and Abstract Data TypesChetan SharmaNo ratings yet
- Design and Analysis of Algorithms for COMP 271Document23 pagesDesign and Analysis of Algorithms for COMP 271boliNo ratings yet
- Real Time System - : BITS PilaniDocument22 pagesReal Time System - : BITS PilanivithyaNo ratings yet
- LINEAR DATA STRUCTURES TIME COMPLEXITYDocument90 pagesLINEAR DATA STRUCTURES TIME COMPLEXITYKavialagan ArjunanNo ratings yet
- Priority-Driven Scheduling of Periodic TasksDocument21 pagesPriority-Driven Scheduling of Periodic TasksChichavn ManucianNo ratings yet
- Clock DrivenDocument11 pagesClock DrivenHassan Hossam El KhabazNo ratings yet
- ESD UNIT III Lecture 03 Task Scheduling Rate MonotonicDocument44 pagesESD UNIT III Lecture 03 Task Scheduling Rate MonotonicNeha MendheNo ratings yet
- Realtimesystems: CharacterizationDocument42 pagesRealtimesystems: Characterizationanon_831089688No ratings yet
- Introduction To Real Time Systems: Hard RT Systems Soft RT SystemsDocument6 pagesIntroduction To Real Time Systems: Hard RT Systems Soft RT Systemsvinod kapateNo ratings yet
- 3445.chapter 3 RTSDocument55 pages3445.chapter 3 RTSIsha AggarwalNo ratings yet
- Chip Basics: Time, Area, Power, Reliability, ConfigurabilityDocument46 pagesChip Basics: Time, Area, Power, Reliability, Configurabilityshahd dawoodNo ratings yet
- Sistemas de Producción SecuenciaciónDocument19 pagesSistemas de Producción SecuenciaciónMilton LeónNo ratings yet
- Lec 2 AlgorithmAnalysis 08032022 031103pmDocument45 pagesLec 2 AlgorithmAnalysis 08032022 031103pmBilal F4No ratings yet
- Unit 8Document66 pagesUnit 8SudarshanNo ratings yet
- COEN 320 Midterm 2 Cheat Sheet FINALDocument2 pagesCOEN 320 Midterm 2 Cheat Sheet FINALRavjotdeep KaurNo ratings yet
- RTS Exercises & SolutionsDocument23 pagesRTS Exercises & Solutionsrktiwary256034No ratings yet
- RT SchedulingDocument32 pagesRT Schedulingbhumika.verma00No ratings yet
- Complexity Analysis Time-Space Trade-OffDocument51 pagesComplexity Analysis Time-Space Trade-OffJatin SinghNo ratings yet
- RT2021 Chap6Document63 pagesRT2021 Chap6Nguyễn Lưu Hoàng MinhNo ratings yet
- TS PSWVDocument16 pagesTS PSWVWail Nou00No ratings yet
- Code Generation: Steve JohnsonDocument45 pagesCode Generation: Steve JohnsonMaria Ghazalia CameroonNo ratings yet
- Multiprocessor Real-Time SchedulingDocument38 pagesMultiprocessor Real-Time SchedulingUm NoorNo ratings yet
- Distributed SystemsDocument20 pagesDistributed SystemsAkash BisariyaNo ratings yet
- Scheduling in Distributed SystemsDocument34 pagesScheduling in Distributed SystemsGenghis Khan 69No ratings yet
- 6 RealTimeSchedulingDocument86 pages6 RealTimeSchedulingKARTIK LADWANo ratings yet
- Distributed Systems Principles and ParadigmsDocument54 pagesDistributed Systems Principles and ParadigmsJeremy WalshNo ratings yet
- Real-Time Scheduling: CIS700 Insup LeeDocument33 pagesReal-Time Scheduling: CIS700 Insup LeeKARUNAMOORTHY BNo ratings yet
- Introduction to Parallel Computing Main ConceptsDocument68 pagesIntroduction to Parallel Computing Main ConceptsRNo ratings yet
- Analysis of AlgorithmsDocument17 pagesAnalysis of AlgorithmsAsha Rose ThomasNo ratings yet
- Queuing and PERTDocument6 pagesQueuing and PERTTyronNo ratings yet
- 05 EventDrivenDocument30 pages05 EventDrivenAlok kumarNo ratings yet
- Resource and Process ManagementDocument98 pagesResource and Process ManagementPiyush KolteNo ratings yet
- Module 3 - Real Time Task Scheduling - Part1Document53 pagesModule 3 - Real Time Task Scheduling - Part1pranavNo ratings yet
- ESO211 (Data Structures and Algorithms) Lectures 1 To 3: 1 Random Access MachineDocument5 pagesESO211 (Data Structures and Algorithms) Lectures 1 To 3: 1 Random Access MachineApoorv AgarwalNo ratings yet
- Unit 5Document19 pagesUnit 5Bindu m.kNo ratings yet
- Intro To DS and Algo AnalysisDocument51 pagesIntro To DS and Algo Analysissachinkumardbg766No ratings yet
- Scheduling Problem Contains N Jobs With M Operations On Each of The Jobs But, in This Case, TheDocument11 pagesScheduling Problem Contains N Jobs With M Operations On Each of The Jobs But, in This Case, ThesawanNo ratings yet
- 02_algoanalysisDocument36 pages02_algoanalysisnttqn203No ratings yet
- 04 UniprocessorDocument58 pages04 UniprocessorBlair ZhangNo ratings yet
- Exercise 4Document4 pagesExercise 4Mashavia AhmadNo ratings yet
- 13 Aperiodic Sporadic Tasks 2Document13 pages13 Aperiodic Sporadic Tasks 2gauravgd16No ratings yet
- معالجة بتاريخ 28 - 4Document3 pagesمعالجة بتاريخ 28 - 4احمد ميسر فتحي كموشNo ratings yet
- Cryptography and Network Security: Sixth Edition by William StallingsDocument40 pagesCryptography and Network Security: Sixth Edition by William Stallingsاحمد ميسر فتحي كموشNo ratings yet
- Today: Intro To Real-Time Scheduling Cyclic ExecutivesDocument27 pagesToday: Intro To Real-Time Scheduling Cyclic Executivesاحمد ميسر فتحي كموشNo ratings yet
- Dr. Noor, 4th Class, Data CompressionDocument28 pagesDr. Noor, 4th Class, Data Compressionاحمد ميسر فتحي كموشNo ratings yet
- Certification Test: Sap Certified Development Consultant Sap Netweaver 2004 - Application Development Focus AbapDocument5 pagesCertification Test: Sap Certified Development Consultant Sap Netweaver 2004 - Application Development Focus AbapbertjNo ratings yet
- Java Collections in DetailDocument29 pagesJava Collections in DetailasisNo ratings yet
- Bash ProgrammingDocument7 pagesBash ProgrammingPranav BansalNo ratings yet
- Brotlipy Documentation: Release 0.7.0Document15 pagesBrotlipy Documentation: Release 0.7.0CRABS ID OfficialNo ratings yet
- XIth STD Computer Science Volume II EM - Combined - 15.08.18Document360 pagesXIth STD Computer Science Volume II EM - Combined - 15.08.18velmuruganNo ratings yet
- IBM Debug Tools zOSDocument23 pagesIBM Debug Tools zOSVictor SalazarNo ratings yet
- What About The Usability in Low-Code Platforms - A SLRDocument16 pagesWhat About The Usability in Low-Code Platforms - A SLRJason K. RubinNo ratings yet
- Relational ModelDocument20 pagesRelational ModelSaipujitha ChowdaryNo ratings yet
- PI System Explorer 2018 SP3 Patch 2 User Guide enDocument610 pagesPI System Explorer 2018 SP3 Patch 2 User Guide enMarlon López PereyraNo ratings yet
- Assembly Sample ProgramsDocument10 pagesAssembly Sample ProgramsAishwarya AroraNo ratings yet
- NMJ406 - VGG16 Python CodeDocument5 pagesNMJ406 - VGG16 Python CodeNURUL ANIS EMILLIA BINTI NAZRI STUDENTNo ratings yet
- Chapter 1 Ntroductiontojava 1Document32 pagesChapter 1 Ntroductiontojava 1Faimina RiyazNo ratings yet
- CS3251 Programming in C Question Bank 1Document1 pageCS3251 Programming in C Question Bank 1Suba SaravananNo ratings yet
- Guide To Searching and Sorting Algorithms in Ocr Exam Reference LanguageDocument8 pagesGuide To Searching and Sorting Algorithms in Ocr Exam Reference LanguageNiruNo ratings yet
- Industrial-Strength Linux Lockdown, Part 2Document16 pagesIndustrial-Strength Linux Lockdown, Part 2PauloNo ratings yet
- Assignment1 - Part A InstructionsDocument13 pagesAssignment1 - Part A InstructionsWarisha KhanNo ratings yet
- Wordpress HooksDocument75 pagesWordpress Hooksbintou emicivNo ratings yet
- Buildroot ManualDocument94 pagesBuildroot ManualkonikakaNo ratings yet
- Software BooksDocument2 pagesSoftware BooksJalajSrivastavaNo ratings yet
- Ktunotes - in-EC308 Embedded SystemsDocument3 pagesKtunotes - in-EC308 Embedded Systemsvishal bijiNo ratings yet
- C Sharp (C#) : Benadir UniversityDocument29 pagesC Sharp (C#) : Benadir UniversityAbdiraxman MaxamedNo ratings yet
- Application Object LibraryDocument92 pagesApplication Object LibraryDebadrita GhoshNo ratings yet
- An Event Driven Arduino 1.6.xDocument39 pagesAn Event Driven Arduino 1.6.xFlavio Andrade100% (1)
- HANA (High Performance Analytic Appliance)Document159 pagesHANA (High Performance Analytic Appliance)Mohit KumarNo ratings yet
- Chapter 1Document9 pagesChapter 1cricket1223No ratings yet
- Module 10Document3 pagesModule 10Trevor BornsteinNo ratings yet
- Ss Project With PythonDocument9 pagesSs Project With PythonBhola KambleNo ratings yet
- NAME: M.Anwar Raza ROLL NO: 2020-BSCS-015 Sec: A: CodeDocument4 pagesNAME: M.Anwar Raza ROLL NO: 2020-BSCS-015 Sec: A: CodeSahil JagdeshNo ratings yet
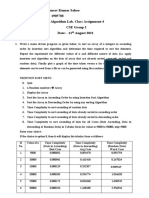
- Student Name:-Saurav Kumar Sahoo Student Roll No.: - 1905788 Algorithm Lab. Class Assignment-4 CSE Group 2 Date: - 11 August 2021Document19 pagesStudent Name:-Saurav Kumar Sahoo Student Roll No.: - 1905788 Algorithm Lab. Class Assignment-4 CSE Group 2 Date: - 11 August 2021788SAURAV KUMAR SAHOONo ratings yet
- Build Neural Network in Python & Make PredictionsDocument35 pagesBuild Neural Network in Python & Make PredictionsmakanakiliNo ratings yet