You might also like
- PGDBA 2016 Question Paper With Answer KeyDocument16 pagesPGDBA 2016 Question Paper With Answer KeySudarshanKumarNo ratings yet
- 1LE Math 11 SolnDocument4 pages1LE Math 11 SolnLuisa PerniaNo ratings yet
- Annex 1C - Ice Plant and Cold Storage Inspection ChecklistDocument9 pagesAnnex 1C - Ice Plant and Cold Storage Inspection ChecklistMaxmore Karumamupiyo100% (2)
- Intended Learning Outcomes (Ilos) : Bpa6012 - Management ScienceDocument11 pagesIntended Learning Outcomes (Ilos) : Bpa6012 - Management ScienceAndie MillNo ratings yet
- Homogeneous Linear Partial Differential Equations With Constant CofficentsDocument17 pagesHomogeneous Linear Partial Differential Equations With Constant CofficentsSerial SpyNo ratings yet
- Q1 Lesson 6Document13 pagesQ1 Lesson 6alvin taganasNo ratings yet
- Solved Problems in Techniques of IntegrationDocument5 pagesSolved Problems in Techniques of IntegrationJayson AcostaNo ratings yet
- Pgdba 2016 PDFDocument14 pagesPgdba 2016 PDFAkash AgrawalNo ratings yet
- Transforming Rational Algebraic Expression Into Quadratic Equation PDFDocument7 pagesTransforming Rational Algebraic Expression Into Quadratic Equation PDFMae RosalesNo ratings yet
- Essential Skills Whole BookletDocument44 pagesEssential Skills Whole BookletJo PatrickNo ratings yet
- Lec 25 Laplace DerivativesDocument29 pagesLec 25 Laplace DerivativesTalha Chaudhary100% (1)
- QUADRATIC EQUATIONS TipsDocument11 pagesQUADRATIC EQUATIONS TipsPaula FanaNo ratings yet
- Problem Laplace TransformDocument8 pagesProblem Laplace Transform22142107No ratings yet
- 4.1.4.2.kunci RemovedDocument20 pages4.1.4.2.kunci Removedkimi no udinNo ratings yet
- Solutions To Exercise 1E: 1 Casio ClasspadDocument4 pagesSolutions To Exercise 1E: 1 Casio ClasspadJonathan JohnsonNo ratings yet
- Scheme Answer GoldDocument4 pagesScheme Answer GoldKin Chen TeeNo ratings yet
- Q1 Reviewer Grade 9 '23 - '24Document39 pagesQ1 Reviewer Grade 9 '23 - '24zandercompletoNo ratings yet
- SOL. APEX-ENGG. (A - 01) Ph.T.No.1 (Jee - Adv. P - II) 18.08.2019Document5 pagesSOL. APEX-ENGG. (A - 01) Ph.T.No.1 (Jee - Adv. P - II) 18.08.2019Ishaan VashisthNo ratings yet
- Solving Quadratic EquationsDocument3 pagesSolving Quadratic EquationsLeo Raymund RidadNo ratings yet
- Taller Punto 1Document6 pagesTaller Punto 1karen natalia pulido rodriguezNo ratings yet
- Series Solution2Document5 pagesSeries Solution2xyzm zyxNo ratings yet
- Solución 8 8 4 + 8 + 8 16 5 8 4 8 + 4 + 3 8 5 4 8 8 + 4 + 8 8 5Document8 pagesSolución 8 8 4 + 8 + 8 16 5 8 4 8 + 4 + 3 8 5 4 8 8 + 4 + 8 8 5MILKAR NEIRA RUIZNo ratings yet
- 91028-Exm-2019 - SolutionsDocument16 pages91028-Exm-2019 - SolutionsJasmineNo ratings yet
- RecuperaçãoDocument3 pagesRecuperaçãomendoncagiovanna397No ratings yet
- 91028-Exm-2019 - SolutionsDocument16 pages91028-Exm-2019 - SolutionsJasmineNo ratings yet
- JEE Main 2021 Question Paper Maths Feb 24 Shift 2Document18 pagesJEE Main 2021 Question Paper Maths Feb 24 Shift 2YashNo ratings yet
- Lesson 456 With Answer Differential CalculusDocument22 pagesLesson 456 With Answer Differential CalculusJein Graceilyn L. CabangonNo ratings yet
- Metode GalerkinDocument5 pagesMetode GalerkinDanang Hadi NugrohoNo ratings yet
- Tugas I Analisis Struktur - Esy LDocument7 pagesTugas I Analisis Struktur - Esy LEsy LuanmaseNo ratings yet
- Actividad Semana 3 Ecuaciones DiferencialesDocument3 pagesActividad Semana 3 Ecuaciones DiferencialesSergio StoneNo ratings yet
- GR 8 Revision Worksheet - Answer KeyDocument2 pagesGR 8 Revision Worksheet - Answer KeyMam DadNo ratings yet
- 3 - Polynomial and Rational Functions - y A (X-H) 2+kDocument3 pages3 - Polynomial and Rational Functions - y A (X-H) 2+kMarc FragosoNo ratings yet
- LKS PenelitianDocument15 pagesLKS PenelitianTuryantoNo ratings yet
- Universidad Nacional Mayor de San Marcos Chemical Engineering Optimization Final ExamDocument4 pagesUniversidad Nacional Mayor de San Marcos Chemical Engineering Optimization Final ExamFernando VillanuevaNo ratings yet
- Resolver La Página 71,72 Los Ejercicios Del 16 Al 46 (Sólo Pares)Document3 pagesResolver La Página 71,72 Los Ejercicios Del 16 Al 46 (Sólo Pares)aylen canoNo ratings yet
- Rectangular Components of Velocity and Acceleration SCDocument12 pagesRectangular Components of Velocity and Acceleration SCLEAH ROSALNo ratings yet
- 2024 - 03 - 09 - 08 - 09 - 31 - ESTADISTICA II - 26.11 - WatermarkDocument15 pages2024 - 03 - 09 - 08 - 09 - 31 - ESTADISTICA II - 26.11 - WatermarkXimena MaquenNo ratings yet
- Quadratic Equations and Inequalities: Credited Summer Class 2019-2020Document16 pagesQuadratic Equations and Inequalities: Credited Summer Class 2019-2020Vitas VitalyNo ratings yet
- FunctionsDocument28 pagesFunctionsZahir B. FareedNo ratings yet
- Solutions Sheet1 PairOfLinesDocument6 pagesSolutions Sheet1 PairOfLinesMAHAMAD KASEMNo ratings yet
- Pre Board Mathematics Set E Marking SchemeDocument8 pagesPre Board Mathematics Set E Marking SchemeVishwajeet GujjarNo ratings yet
- W5 2020 Penang Addmath (Module 2) K2 SkemaDocument6 pagesW5 2020 Penang Addmath (Module 2) K2 SkemaJacelynNo ratings yet
- UntitledDocument8 pagesUntitledNICDAO, Christine JoyNo ratings yet
- Revised RELATIONS and FUNCTIONS Part 2Document22 pagesRevised RELATIONS and FUNCTIONS Part 2NathalieNo ratings yet
- Sasol MAtel PDFDocument5 pagesSasol MAtel PDFFadila AnantaNo ratings yet
- Basic MathsDocument2 pagesBasic MathsSnehin PoddarNo ratings yet
- MC Ty Apgp 2009 1Document1 pageMC Ty Apgp 2009 1Arun RawatNo ratings yet
- Latihan Soal Persiapan PTSDocument2 pagesLatihan Soal Persiapan PTSjessccawijayaNo ratings yet
- Problemario Primer Parcial - Frausto MataDocument12 pagesProblemario Primer Parcial - Frausto MataFelipe J FCNo ratings yet
- Latihan Transformasi LaplaceDocument9 pagesLatihan Transformasi LaplaceDhimas Agil UmariNo ratings yet
- Activity Module 6Document3 pagesActivity Module 6Lala LandNo ratings yet
- Integration by Exponential FunctionsDocument6 pagesIntegration by Exponential FunctionsSolis ZybellsNo ratings yet
- Calculo Tarea 7Document5 pagesCalculo Tarea 7rodolfo faaschNo ratings yet
- Esci 110 - n046 - Module 7 PostestDocument8 pagesEsci 110 - n046 - Module 7 PostestIvy PerezNo ratings yet
- Numerical Methods Lecture #12Document21 pagesNumerical Methods Lecture #12Jawad Ul Hassan ShahNo ratings yet
- All Nimcet Pyss Question Quadratic SolutionDocument7 pagesAll Nimcet Pyss Question Quadratic SolutionRahul singh bishtNo ratings yet
- Notes I-1Document2 pagesNotes I-1Ephelia resortNo ratings yet
- AUT Math Sample ProblemsDocument4 pagesAUT Math Sample ProblemsАманка АйгабуловNo ratings yet
- S.6 Pure Mathematics Assignment (1)Document3 pagesS.6 Pure Mathematics Assignment (1)DenisNo ratings yet
- Section - Mathematical Modeling of Mechanical SystemsDocument13 pagesSection - Mathematical Modeling of Mechanical SystemsMandolinNo ratings yet
- LEC10-E1236 - Control 1Document8 pagesLEC10-E1236 - Control 1MandolinNo ratings yet
- Section - Mathematical Modeling of Electrical SystemsDocument15 pagesSection - Mathematical Modeling of Electrical SystemsMandolinNo ratings yet
- LEC14-E1236-control 1Document20 pagesLEC14-E1236-control 1MandolinNo ratings yet
- LEC11 E1236 Control 1Document12 pagesLEC11 E1236 Control 1MandolinNo ratings yet
- LEC12 E1236 Control 1Document12 pagesLEC12 E1236 Control 1MandolinNo ratings yet
- Teacher Planner 2023 PDFDocument52 pagesTeacher Planner 2023 PDFitaNo ratings yet
- David-Huynh Indeed ResumeDocument3 pagesDavid-Huynh Indeed Resumeapi-546353822No ratings yet
- Roundup WG Bula MonsantoDocument16 pagesRoundup WG Bula MonsantodandanyddNo ratings yet
- Accomplishment Report Dictrict Preventive MaintenanceDocument2 pagesAccomplishment Report Dictrict Preventive MaintenanceZenia CapalacNo ratings yet
- Google-Analytics 01Document28 pagesGoogle-Analytics 01Smm Store24No ratings yet
- Definition of Sustainable Packaging PDFDocument10 pagesDefinition of Sustainable Packaging PDFProf C.S.PurushothamanNo ratings yet
- Allergies To Cross-Reactive Plant Proteins: Takeshi YagamiDocument11 pagesAllergies To Cross-Reactive Plant Proteins: Takeshi YagamisoylahijadeunvampiroNo ratings yet
- Nishith Desai Associates - Alternative Investment Funds - SEBI Scores Half Century On DebutDocument2 pagesNishith Desai Associates - Alternative Investment Funds - SEBI Scores Half Century On DebutRajesh AroraNo ratings yet
- 11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsDocument6 pages11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsCorrado BisottoNo ratings yet
- Aml Questionnaire For Smes: CheduleDocument5 pagesAml Questionnaire For Smes: CheduleHannah CokerNo ratings yet
- Model: The Most Accepted and Respected Engine-Driven Cooler in The Gas Compression IndustryDocument2 pagesModel: The Most Accepted and Respected Engine-Driven Cooler in The Gas Compression IndustryparathasiNo ratings yet
- How To Guide To Oauth and API SecurityDocument12 pagesHow To Guide To Oauth and API Securitysilviuleahu100% (1)
- ABES Engineering College, Ghaziabad Classroom Photograph: (Ramanujan Block, First Floor)Document21 pagesABES Engineering College, Ghaziabad Classroom Photograph: (Ramanujan Block, First Floor)Avdhesh GuptaNo ratings yet
- HRM Final Ass Apple Human Resource Management AssesmentDocument8 pagesHRM Final Ass Apple Human Resource Management AssesmentAditya Nandi Vardhana100% (1)
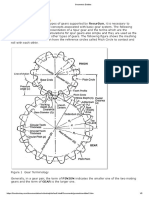
- Geometric Entities: Basic Gear TerminologyDocument5 pagesGeometric Entities: Basic Gear TerminologyMatija RepincNo ratings yet
- Determination of Sales Force Size - 2Document2 pagesDetermination of Sales Force Size - 2Manish Kumar100% (3)
- Peace Corps Guatemala Welcome Book - June 2009Document42 pagesPeace Corps Guatemala Welcome Book - June 2009Accessible Journal Media: Peace Corps DocumentsNo ratings yet
- Gist of FIEO ServicesDocument1 pageGist of FIEO Servicessanjay patraNo ratings yet
- Raspberry Pi Installing Noobs OSDocument3 pagesRaspberry Pi Installing Noobs OSEXORCENo ratings yet
- Choosing The Right HF Welding Process For Api Large Pipe MillsDocument5 pagesChoosing The Right HF Welding Process For Api Large Pipe MillsNia KurniaNo ratings yet
- Tesco Travel Policy BookletDocument64 pagesTesco Travel Policy Bookletuser001hNo ratings yet
- Partes Oki - MPS5501B - RSPL - Rev - HDocument12 pagesPartes Oki - MPS5501B - RSPL - Rev - HJaiber Eduardo Gutierrez OrtizNo ratings yet
- CV Rafi Cargill, GAR, MCR, AM GROUP and Consultancy EraDocument6 pagesCV Rafi Cargill, GAR, MCR, AM GROUP and Consultancy EranorulainkNo ratings yet
- County Project Name Cycle Project Address Proj City Proj Zip Applicant/Owner Name HDGP $ Home $ FHTF $ Lihtc9 $ Help $ Oahtc $ Ghap $ HPF $ Lihtc4 $Document60 pagesCounty Project Name Cycle Project Address Proj City Proj Zip Applicant/Owner Name HDGP $ Home $ FHTF $ Lihtc9 $ Help $ Oahtc $ Ghap $ HPF $ Lihtc4 $Mamello PortiaNo ratings yet
- Part List SR-DVM70AG, SR-DVM70EUDocument28 pagesPart List SR-DVM70AG, SR-DVM70EUAndrea BarbadoroNo ratings yet
- DSP Unit V ObjectiveDocument4 pagesDSP Unit V Objectiveshashi dharNo ratings yet
- HK Magazine 03082013Document56 pagesHK Magazine 03082013apparition9No ratings yet
- Applicant Details : Government of Tamilnadu Application Form For Vehicle E-Pass For Essential ServicesDocument1 pageApplicant Details : Government of Tamilnadu Application Form For Vehicle E-Pass For Essential ServicesŠářoĵ PrinceNo ratings yet
- Advanced Machining User Guide PDFDocument250 pagesAdvanced Machining User Guide PDFDaniel González JuárezNo ratings yet