You might also like
- Turbulent Flow Cylinder Benin To Suh 2008Document9 pagesTurbulent Flow Cylinder Benin To Suh 2008Mehdi KamalNo ratings yet
- Numerical Simulation of Flow Field Formed in Water Pump-SumpDocument12 pagesNumerical Simulation of Flow Field Formed in Water Pump-SumpAnonymous KSHLSkbiNo ratings yet
- 1 s2.0 S0920410521005842 MainDocument18 pages1 s2.0 S0920410521005842 MainFranciani GoedertNo ratings yet
- 00020631Document14 pages00020631Imad Taher AliNo ratings yet
- DTIS21264Document17 pagesDTIS21264mirage_et_rafale9572No ratings yet
- IADC/SPE 81636 Improvements in Dynamic Modeling of Underbalanced DrillingDocument8 pagesIADC/SPE 81636 Improvements in Dynamic Modeling of Underbalanced DrillingJohnSmithNo ratings yet
- 2010-Application of OpenFOAM To Simulate Three-Dimensional Flows Past A Single and Two Tandem Circular CylindersDocument8 pages2010-Application of OpenFOAM To Simulate Three-Dimensional Flows Past A Single and Two Tandem Circular CylindersFei TongNo ratings yet
- Numerical Simulation of Evaporation of Volatile LiquidsDocument11 pagesNumerical Simulation of Evaporation of Volatile LiquidsVALERIA PAOLA ALARCON MU‹OZNo ratings yet
- Chemical Engineering Science: Mohsen Hamidipour, Jinwen Chen, Faı C - Al LarachiDocument14 pagesChemical Engineering Science: Mohsen Hamidipour, Jinwen Chen, Faı C - Al LarachiymailioNo ratings yet
- SPE 56520 A Unified Mechanistic Model For Steady-State Two-Phase Flow in Wellbores and PipelinesDocument14 pagesSPE 56520 A Unified Mechanistic Model For Steady-State Two-Phase Flow in Wellbores and PipelinesJose Gregorio FariñasNo ratings yet
- Numerical Investigation of Recirculation Zone Length Upstream of Round-Nosed BCWDocument6 pagesNumerical Investigation of Recirculation Zone Length Upstream of Round-Nosed BCWAlind HasanNo ratings yet
- Two Phase Blowdown From PipelinesDocument34 pagesTwo Phase Blowdown From PipelinesMichael ParkerNo ratings yet
- AnnualDocument29 pagesAnnualtoufik saouchiNo ratings yet
- PavlidisDimakopoulosTsamopoulos 2009RheolActaDocument19 pagesPavlidisDimakopoulosTsamopoulos 2009RheolActachristos032No ratings yet
- Computers & Fluids: Samy M. El-Behery, Mofreh H. HamedDocument10 pagesComputers & Fluids: Samy M. El-Behery, Mofreh H. HamedAntonio BatataNo ratings yet
- Matrix-Fracture Transfer Function in Dual-Medium Flow Simulation - Review, Comparison, and ValidationDocument25 pagesMatrix-Fracture Transfer Function in Dual-Medium Flow Simulation - Review, Comparison, and ValidationNassr Al BadriNo ratings yet
- A Simple Mechanistic Model For Void-Fraction and Pressure-Gradient Prediction in Vertical and Inclined Gas/Liquid FlowDocument6 pagesA Simple Mechanistic Model For Void-Fraction and Pressure-Gradient Prediction in Vertical and Inclined Gas/Liquid FlowAlfajarGintingNo ratings yet
- Multiphase Flow and Fluidization: Continuum and Kinetic Theory DescriptionsFrom EverandMultiphase Flow and Fluidization: Continuum and Kinetic Theory DescriptionsRating: 5 out of 5 stars5/5 (1)
- Visualization of The Flow Patterns in A High-Pressure Homogenizing Valve Using A CFD PackageDocument15 pagesVisualization of The Flow Patterns in A High-Pressure Homogenizing Valve Using A CFD PackageMohammadreza NaghaviNo ratings yet
- Detection of fouling in a heat exchanger using subspace identificationDocument8 pagesDetection of fouling in a heat exchanger using subspace identificationGodofredoNo ratings yet
- Comparison of LES and RANS Calculations of The Flow Around Bluff BodiesDocument21 pagesComparison of LES and RANS Calculations of The Flow Around Bluff BodiesMahrukh ZAIDINo ratings yet
- Modeling Oscillating Wave Surge Converters with OpenFOAMDocument16 pagesModeling Oscillating Wave Surge Converters with OpenFOAMKevin AlejandroNo ratings yet
- TI2018 EllipsoidDocument13 pagesTI2018 EllipsoidBS GOURISARANNo ratings yet
- Vergara - Et - Al - 2022 - MODELAMIENTO DE RELAVES RUNOFFDocument7 pagesVergara - Et - Al - 2022 - MODELAMIENTO DE RELAVES RUNOFFAdrian Guevara LoayzaNo ratings yet
- Reactor InternalsDocument7 pagesReactor InternalsArjed Ali ShaikhNo ratings yet
- Numerical Modelling of Transient Flow in Long Oil Pipe Line SystemDocument33 pagesNumerical Modelling of Transient Flow in Long Oil Pipe Line SystemlsaishankarNo ratings yet
- CFD Calculations of The Flow Over A Naca 0012 Airfoil: July 2010Document8 pagesCFD Calculations of The Flow Over A Naca 0012 Airfoil: July 2010Justin FletcherNo ratings yet
- Application of The Method of Characteristics in The Analysis of Transient Events in Natural Gas Distribution NetworksDocument8 pagesApplication of The Method of Characteristics in The Analysis of Transient Events in Natural Gas Distribution NetworksIJAERS JOURNALNo ratings yet
- Vortex Identification and Evolution of A Jet in Cross Flow Based On RortexDocument15 pagesVortex Identification and Evolution of A Jet in Cross Flow Based On RortexGaurav MisuriyaNo ratings yet
- Numerical Simulation of Single Phase Flow With Eulerian ModelDocument3 pagesNumerical Simulation of Single Phase Flow With Eulerian ModelBeatriz BarbozaNo ratings yet
- COB09-1054 Panel MethodsDocument9 pagesCOB09-1054 Panel MethodsAnonymous K48TgviNo ratings yet
- Kut A So Ve PP Elbaum Stanford 08Document7 pagesKut A So Ve PP Elbaum Stanford 08Al DaNo ratings yet
- Aerospace 05 00096Document10 pagesAerospace 05 00096Santiago CastiblancoNo ratings yet
- Three-Dimensional Scour Simulations With A Two-Phase Flow ModelDocument39 pagesThree-Dimensional Scour Simulations With A Two-Phase Flow Modeldave kisaluNo ratings yet
- A New K-Eddy-Viscosity Model For High Reynolds Number Turbulent FlowsDocument12 pagesA New K-Eddy-Viscosity Model For High Reynolds Number Turbulent FlowsZakManNo ratings yet
- 1.2 Fine Scale Modeling of Urban Structures: Dependence On Grid and Model FeaturesDocument6 pages1.2 Fine Scale Modeling of Urban Structures: Dependence On Grid and Model FeatureskamsNo ratings yet
- 1-1 Attou 1999 PDFDocument19 pages1-1 Attou 1999 PDFCristian AmadorNo ratings yet
- Review of Slug Detection Modeling and Co PDFDocument8 pagesReview of Slug Detection Modeling and Co PDFKathirNo ratings yet
- Compressible Effects Modelling in Turbulent Cavitating p.8 p.18Document85 pagesCompressible Effects Modelling in Turbulent Cavitating p.8 p.18劉平本No ratings yet
- CHP 10Document102 pagesCHP 10Moussa DiopNo ratings yet
- A Comparative Study of Turbulence Models Performance For Turbulent Flow in A Planar Asymmetric DiffuserDocument12 pagesA Comparative Study of Turbulence Models Performance For Turbulent Flow in A Planar Asymmetric DiffuserMukesh BohraNo ratings yet
- Numerical Investigation of Bend and Torus Flows, Part I Effect of Swirl Motion On Flow Structure in U-BendDocument14 pagesNumerical Investigation of Bend and Torus Flows, Part I Effect of Swirl Motion On Flow Structure in U-BendSami ur RehmanNo ratings yet
- Applied Mathematical Modelling: S.J. Karabelas, B.C. Koumroglou, C.D. Argyropoulos, N.C. MarkatosDocument20 pagesApplied Mathematical Modelling: S.J. Karabelas, B.C. Koumroglou, C.D. Argyropoulos, N.C. MarkatosNMarkatosNo ratings yet
- CFD - Demister 2015Document10 pagesCFD - Demister 2015lorenzo100% (1)
- Grade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsDocument6 pagesGrade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsrakukulappullyNo ratings yet
- River water quality modelling reviewDocument8 pagesRiver water quality modelling reviewWilliam JaimesNo ratings yet
- 1 s2.0 S0009250913005745 MainDocument11 pages1 s2.0 S0009250913005745 MainkireetiresearchNo ratings yet
- Modelling Pressure: Leakage Response in Water Distribution Systems Considering Leak Area VariationDocument8 pagesModelling Pressure: Leakage Response in Water Distribution Systems Considering Leak Area VariationIonut CatalinNo ratings yet
- Prediction of Mass Transfer Coefficients in A Puls PDFDocument11 pagesPrediction of Mass Transfer Coefficients in A Puls PDFعبدالمحسن علي ENo ratings yet
- Prediction of Mass Transfer Coefficients in A PulsDocument11 pagesPrediction of Mass Transfer Coefficients in A PulshusseinNo ratings yet
- CFD Modeling of Three-phase Bubble Column EffectsDocument8 pagesCFD Modeling of Three-phase Bubble Column EffectsNanda PaulNo ratings yet
- Simulating Vortex Shedding at High Reynolds NumbersDocument6 pagesSimulating Vortex Shedding at High Reynolds NumbersDeniz ümit BayraktutarNo ratings yet
- Finite Pointset Method For Simulation of The Liquid Liquid Flow Field in An ExtractorDocument12 pagesFinite Pointset Method For Simulation of The Liquid Liquid Flow Field in An ExtractorPadmini RajuNo ratings yet
- Rhode 1986Document7 pagesRhode 1986Amin ZoljanahiNo ratings yet
- CFDJ Stockdill Et Al 2006Document20 pagesCFDJ Stockdill Et Al 20061saeed9No ratings yet
- CFD Simulation of The Solid-Liquid Slurry FLow in A Pipeline (Ej) (NABIL, T El-SAWAF, I. El-NAHHAS, K.) (17th Int. Water Techn. Conf. IWTC17 2013) (14s)Document14 pagesCFD Simulation of The Solid-Liquid Slurry FLow in A Pipeline (Ej) (NABIL, T El-SAWAF, I. El-NAHHAS, K.) (17th Int. Water Techn. Conf. IWTC17 2013) (14s)R_M_M_No ratings yet
- Novel design for passive micromixers based on topology optimizationDocument15 pagesNovel design for passive micromixers based on topology optimizationRenata VicentinoNo ratings yet
- Andreolli JPSE 2018Document14 pagesAndreolli JPSE 2018Filipe SantosNo ratings yet
- Random Packing: From Competitive Products To Advanced SolutionsDocument16 pagesRandom Packing: From Competitive Products To Advanced SolutionsiazcuzcNo ratings yet
- Tarig Abd Elkhabeir Nour Abd ElrahmanDocument75 pagesTarig Abd Elkhabeir Nour Abd ElrahmanAnonymous 20VAruNo ratings yet
- AN2700EN00 TFF Optimization EMDocument12 pagesAN2700EN00 TFF Optimization EMgeorgadam1983No ratings yet
- Packing Pressure Drop Prediction at Low Operating Pressure Is There Anything NewDocument11 pagesPacking Pressure Drop Prediction at Low Operating Pressure Is There Anything NewAmir AbbaszadehNo ratings yet
- Pack Column Hetp PDFDocument29 pagesPack Column Hetp PDFMayurShindeNo ratings yet
- GE Cross Flow Filtration MethodDocument82 pagesGE Cross Flow Filtration MethodPapagong7077No ratings yet
- Calculations Membrane ProcessesDocument3 pagesCalculations Membrane ProcessesAnonymous 20VAruNo ratings yet
- Calculations Membrane ProcessesDocument3 pagesCalculations Membrane ProcessesAnonymous 20VAruNo ratings yet
- Vacuum and Heat Transfer Barometric Condenser ManualDocument11 pagesVacuum and Heat Transfer Barometric Condenser ManualNick Smith100% (1)
- Painting Istructions Accroding ISO 12944-5Document40 pagesPainting Istructions Accroding ISO 12944-5giulioiussich100% (5)
- Ferric Chloride FeCl3 Density PDFDocument3 pagesFerric Chloride FeCl3 Density PDFcontactdevansh1174No ratings yet
- Ferric Chloride ParametersDocument7 pagesFerric Chloride ParametersAnonymous 20VAruNo ratings yet
- MILLIPORE - Protein Concentration and Diafiltration by Tangential Flow FiltrationDocument24 pagesMILLIPORE - Protein Concentration and Diafiltration by Tangential Flow FiltrationannesmthNo ratings yet
- GE Cross Flow Filtration MethodDocument82 pagesGE Cross Flow Filtration MethodPapagong7077No ratings yet
- DC CondenserDocument29 pagesDC Condenserraviii007No ratings yet
- Fm1e 09Document2 pagesFm1e 09Anonymous 20VAruNo ratings yet
- DC CondenserDocument29 pagesDC Condenserraviii007No ratings yet
- A Thesis Submitted in Partial Fulfilment ofDocument154 pagesA Thesis Submitted in Partial Fulfilment ofHana HermawanNo ratings yet
- THERMINOL LT Technical BulletinDocument8 pagesTHERMINOL LT Technical BulletinAnonymous 20VAruNo ratings yet
- A Thesis Submitted in Partial Fulfilment ofDocument154 pagesA Thesis Submitted in Partial Fulfilment ofHana HermawanNo ratings yet
- Vacuum and Heat Transfer Barometric Condenser ManualDocument11 pagesVacuum and Heat Transfer Barometric Condenser ManualNick Smith100% (1)
- Therminol 62 Update - QXD - Therminol - 62Document8 pagesTherminol 62 Update - QXD - Therminol - 62Anonymous 20VAruNo ratings yet
- Systems Design Data PDFDocument58 pagesSystems Design Data PDFJose Lorenzo ToralNo ratings yet
- Systems Design Data PDFDocument58 pagesSystems Design Data PDFJose Lorenzo ToralNo ratings yet
- Vapor Phase Liquid Phase Heat Transfer Fluid: 54 Fto 750 FDocument11 pagesVapor Phase Liquid Phase Heat Transfer Fluid: 54 Fto 750 Fhapizeguet8128No ratings yet
- Therminol Bulletin 3 - FiltrationDocument4 pagesTherminol Bulletin 3 - FiltrationAnonymous 20VAruNo ratings yet
- Therminol Bulletin 3 - FiltrationDocument4 pagesTherminol Bulletin 3 - FiltrationAnonymous 20VAruNo ratings yet
- THERMINOL LT Technical BulletinDocument8 pagesTHERMINOL LT Technical BulletinAnonymous 20VAruNo ratings yet
- Vapor Phase Liquid Phase Heat Transfer Fluid: 54 Fto 750 FDocument11 pagesVapor Phase Liquid Phase Heat Transfer Fluid: 54 Fto 750 Fhapizeguet8128No ratings yet
- MX 201110 enDocument1,203 pagesMX 201110 envajrahastaNo ratings yet
- 3M CatalogueDocument32 pages3M Cataloguefandi.azs37No ratings yet
- Collaboration Processes: Looking Inside the Black BoxDocument13 pagesCollaboration Processes: Looking Inside the Black Boxเข้าใจว่า น่าจะชื่อตุ้นNo ratings yet
- Comparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010Document6 pagesComparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010mtanaydinNo ratings yet
- FIKE RD Combo With Relief ValvesDocument11 pagesFIKE RD Combo With Relief ValvesAnkit GandhiNo ratings yet
- Lista de Precios Tones y Staleks 01.04Document3 pagesLista de Precios Tones y Staleks 01.04Maria T. OliverosNo ratings yet
- Amco Veba Marine - Brochure - LRDocument24 pagesAmco Veba Marine - Brochure - LRHươngTpuNo ratings yet
- Learn More: National Weather ServiceDocument2 pagesLearn More: National Weather Servicedamien boyerNo ratings yet
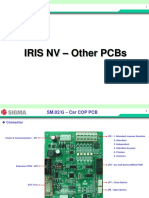
- 07 IRIS NV PCB OtherDocument15 pages07 IRIS NV PCB OtherArnaldo cordovaNo ratings yet
- Electronic V-MAC IV Vehicle Mgmt. and Control With Co-Pilot Display Operator ManualDocument133 pagesElectronic V-MAC IV Vehicle Mgmt. and Control With Co-Pilot Display Operator Manualsanach0412No ratings yet
- History of FlightDocument10 pagesHistory of FlightHanin AlanaziNo ratings yet
- IP Modulator User's Guide - Oct - 09Document68 pagesIP Modulator User's Guide - Oct - 09reivajjwNo ratings yet
- STP1236 Eb.1415051 1 PDFDocument208 pagesSTP1236 Eb.1415051 1 PDFpaolaNo ratings yet
- Experimental Monitoring of The Humber Bridge UsingDocument7 pagesExperimental Monitoring of The Humber Bridge Using정주호No ratings yet
- A Grammar of Anong Language Death Under Intense ContactDocument409 pagesA Grammar of Anong Language Death Under Intense ContacthaoyichuanNo ratings yet
- Foreign Body Airway ObstructionDocument6 pagesForeign Body Airway ObstructionReeja RajeshNo ratings yet
- General ALT Model For Step Stress TestDocument12 pagesGeneral ALT Model For Step Stress TestAnshul NautiyalNo ratings yet
- Explore the beaches and parks of Labuan IslandDocument2 pagesExplore the beaches and parks of Labuan IslandDudeNo ratings yet
- Textiles and Clothing SustaninabilityDocument134 pagesTextiles and Clothing Sustaninabilitydike100% (1)
- S2 Papers FinalizedDocument149 pagesS2 Papers FinalizedRaffles HolmesNo ratings yet
- Essay - DnaDocument2 pagesEssay - Dnaapi-243852896No ratings yet
- AABB Accredited DNA Testing FacilitiesDocument2 pagesAABB Accredited DNA Testing Facilitiesjosueduran75No ratings yet
- Astm D2467-2013Document8 pagesAstm D2467-2013Renato CorrêaNo ratings yet
- The Nature of Substance - Rudolf Hauschka PDFDocument250 pagesThe Nature of Substance - Rudolf Hauschka PDFBruno Morin100% (5)
- Rules For The CertificationDocument84 pagesRules For The CertificationhdelriovNo ratings yet
- Chemistry of Food Changes During Storage: Group 7Document22 pagesChemistry of Food Changes During Storage: Group 7Sonny MichaelNo ratings yet
- F0a7c Compal LA-A994p r1.0 2014Document38 pagesF0a7c Compal LA-A994p r1.0 2014DeyProNo ratings yet
- 4 Floral ClockDocument4 pages4 Floral ClockmiguelibasterNo ratings yet
- Experiment# 3 Projectile Motion (Tasks 3 and 4)Document18 pagesExperiment# 3 Projectile Motion (Tasks 3 and 4)Hafiz MuhammadNo ratings yet
- Physics Formulas and Symbols: Physics I Symbol FormulaDocument5 pagesPhysics Formulas and Symbols: Physics I Symbol Formulakaparthy100% (9)