Professional Documents
Culture Documents
Optimization of Elevated Concrete Foundations For Vibrating Machines
Uploaded by
حيدر البصريOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Optimization of Elevated Concrete Foundations For Vibrating Machines
Uploaded by
حيدر البصريCopyright:
Available Formats
Optimization of Elevated Concrete Foundations for Vibrating
Machines
Marcelo A. Silva1; Jasbir S. Arora, F.ASCE2; Colby C. Swan, M.ASCE3; and Reyolando M. L. R. F. Brasil4
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
Abstract: The objective of this study is to describe a problem formulation and an optimization procedure for the design of elevated
reinforced concrete foundations for vibrating machines. Special emphasis is placed on structures composed of footings, beams, and
columns. The dimensions of the structure and its reinforcement are the design variables for the optimization problem. The objective
function consists of costs of the concrete, the steel, the form, and the propping form. Constraints related to material and soil failure, as
well as geometrical limits and human comfort are imposed. A new failure surface for columns and beams subjected to biaxial bending and
axial loads is defined and used in the formulation. The main motivation of using the new failure surface is to save a large amount of
computational effort in the solution of this dynamic response optimization problem. The problem of minimizing the structural cost while
satisfying the operating and safety requirements is solved using an augmented Lagrangian method. A large number of constraints 共time
dependent and time independent兲 is treated without any difficulty in the method. The numerical methods used in the solution process are
described. Optimal solutions for an example problem are obtained and discussed.
DOI: 10.1061/共ASCE兲0733-9445共2002兲128:11共1470兲
CE Database keywords: Optimization; Design; Concrete structures; Dynamic loads; Soil-structure interaction.
Introduction while ‘‘Numerical Examples’’ contains numerical results for an
example problem. Finally, discussion and conclusions are given.
Introductory Remarks
Review of Literature
To solve realistic and practical optimal structural design prob-
lems, different formulations need to be studied and their effects The design of elevated foundations for vibrating machines in-
on the optimal design process need to be investigated. The pur- volves analysis of both the structure and its foundation. Several
pose of this paper is to address the problem of optimal design of publications describe the interaction of these two areas, as well as
reinforced concrete structures and foundations for vibrating ma- the soil-structure interaction. Arya et al. 共1979兲 wrote a very im-
chines. As a specific example of this class of problems, the design portant and complete book on the design of structures and foun-
of an elevated reinforced concrete foundation is considered. An dations for vibrating machines and described several available
overview of the literature on the subject is presented in the fol- processes for design of structures excited by vibrations with an
lowing section, and the objectives of the paper are described. In emphasis on practical applications. Studies describing how to
‘‘Problem Description,’’ the design problem is described and model dynamic soil–structure interaction can be found in several
structural analysis procedure is discussed, including the soil– works by Stojko 共1989, 1990, 1991, 1993兲, Llambias 共1993兲, Di-
structure interaction problem. Formulation of the optimal design eterman and Gajewski 共1996兲, and Zhao 共1999兲.
problem is described in ‘‘Optimal Design: Problem Formulation,’’ There are several methods for modeling the soil–structure in-
teraction, as described in Dieterman and Gajewski 共1996兲, and
1
Dept. de Engenharia de Estruturas e Fundações, Escola Politécnica Stojko 共1991, 1993兲. The solution based on Green’s function of a
da Univ. de São Paulo, Caixa Postal 61548 CEP 05.424-970 São Paulo- cone model can be used to calculate the stiffness and mass ma-
SP., Brasil. trices of the soil 共Wolf 1994兲. Another approach is to solve the
2
Dept. of Civil and Environmental Engineering, Center for Computer-
problem as a contact problem, where two media—the plate and
Aided Design, The Univ. of Iowa, Iowa City, IA 52242 共corresponding
author兲. E-mail: jasbir-arora@uiowa.edu the soil—deform together under the action of loads, but satisfying
3
Dept. of Civil and Environmental Engineering, Center for Computer- the constraint of impenetrability of bodies 共Zhao 1999兲. A usual
Aided Design, The Univ. of Iowa, Iowa City, IA 52242. way is to model the problem as a flexible plate on an elastic soil
4
Dept. de Engenharia de Estruturas e Fundações, Escola Politécnica 共Das 1990兲. This approach is adopted in the present work.
da Univ. de São Paulo, Caixa Postal 61548 CEP 05.424-970 São Paulo- Regarding the optimization process, there are numerous works
SP., Brasil. in this area in the literature 共Fletcher 1985; Arora 1989; Arora
Note. Associate Editor: Shahram Pezeshk. Discussion open until April et al. 1997; Kocer and Arora 1999; Arora 1999兲. These works
1, 2003. Separate discussions must be submitted for individual papers. To show how general optimization methodology can be applied for
extend the closing date by one month, a written request must be filed with
practical design of continuous problems, such as the problems
the ASCE Managing Editor. The manuscript for this paper was submitted
for review and possible publication on January 3, 2001; approved on solved in the present paper. For reinforced concrete structures in
April 9, 2001. This paper is part of the Journal of Structural Engineer- particular, a number of design optimization studies have been
ing, Vol. 128, No. 11, November 1, 2002. ©ASCE, ISSN 0733-9445/ reported recently where the ultimate capacity constraints were
2002/11-1470–1479/$8.00⫹$.50 per page. imposed upon the structure. For example, Roddis et al. 共1996兲
1470 / JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002
J. Struct. Eng. 2002.128:1470-1479.
and Roddis and Chunnanond 共1996兲 used a genetic algorithm
where ultimate capacity constraints were incorporated into the
overall fitness function to design and detail concrete structures
subjected to static loading. Each element was optimized sepa-
rately by including bending capacity constraints based on biaxial
bending and axial load. Balling and Yao 共1997兲 described how to
optimize framework subjected to static loads using a two-phase
procedure. In the first phase, the cross-section dimensions of the
members were optimized. These were treated as continuous de-
sign variables and a nonlinear programming 共NLP兲 method was
used to obtain the solution. In the second phase, the cross-section
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
dimensions as well as the member axial forces and moment en-
velopes of columns and beams were held fixed while the rein-
forcement was optimized using a discrete exhaustive search 共Ball-
ing et al. 1997兲. During the second phase constraints related to
bending capacity were imposed.
Several authors have investigated optimal structural design
with dynamic constraints. Haug and Arora 共1979兲 and a few oth-
ers were the early researchers in this area. They analyzed impact
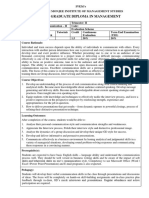
absorbers, vibration isolators, and vehicle suspension systems. Fig. 1. Typical elevated foundation
Chahande and Arora 共1994兲 performed the optimization of large
linearly elastic structures subjected to dynamic loads. Mass of
columns of a 50 floors shear building was minimized subjected to
a blast load. Goldenberg et al. 共1997兲 performed optimization of a
substantially reduces the computational effort in evaluating the
portal frame with elastoplastic behavior subjected to an impact
bending capacity constraint, especially for the dynamic loading
load. Besides this, Silva and Brasil 共1999a,b兲 have considered
environment.
human comfort in problems of mass minimization of columns and
plates. They minimized the material and form costs of a rein-
forced concrete structure subjected to dynamic loads. Constraints,
design variables, and a general cost function for optimization of Problem Description
foundations under vibratory loading were presented by Silva et al.
共1999兲, and a reinforced concrete footing was optimized for ma- Elevated Foundation
terial and construction costs. Kocer and Arora 共1999兲 treated dy-
namic response optimization of transmission line structures sub- A typical elevated pedestal foundation consisting of columns,
jected to earthquake loads using several optimization methods. beams, and a footing is shown in Fig. 1. For beams and columns,
B⫽width, H⫽height of the cross section, and L⫽length. For the
footing, the sides are 2l x and 2l y , and the thickness is h. This
Objectives kind of a structure is encountered in several industrial plants and
The foregoing review of literature reveals that some research has is generally used as a table top compressor structure.
indeed been carried out regarding methods for optimal design of When the optimal design of structures supporting vibrating
reinforced concrete structures and reinforced concrete founda- machines is investigated, the machine requirements are an impor-
tions. In these studies, however, the structure and the foundation tant input. There are many types of vibrating machines that can be
were optimized separately. As a result, the main objective of this classified into two large groups: centrifugal and reciprocating ma-
work is to develop a realistic and practical formulation for inte- chines. In either case, a periodic time-dependent loading function
grated optimal design of structures and foundations for vibrating is transmitted through the structure to the foundation. To design
machines. Soil–structure interaction is included in the proposed the foundation, the following machine geometrical and perfor-
formulation. mance factors are required: outline of the machine; functions of
In optimal design of reinforced concrete structures composed the machine; weight of the machine and its components; location
of beams and columns subjected to dynamic loads, it is necessary of center of gravity; speed ranges of machine and unbalanced
to perform dynamic structural analysis so that dynamic con- frequency; primary and secondary forces; and limits imposed on
straints can be imposed at each time point. The evaluation of the foundation with respect to differential deflections within the
dynamic constraints related to the biaxial bending and load capac- plan area of the foundation.
ity of beam/column sections at every time step consumes substan- The outline for the machine base generally specifies minimum
tial computational effort. For structures subjected to static loads, permissible dimensions for the foundation and locates specific
this verification is not so expensive, because for every concrete areas that must be left clear for machine attachments. For ex-
element, computation of the moment capacity must be done only ample, in turbines, certain regions under and over the machine
once for a given set of design variables. However, in dynamic must be left clear for condensers and piping. Machine functions
optimization problems it is necessary to check the bending capac- include information on the overall purpose and critical nature of
ity constraint at every time step for a given design. To reduce this the machine. Should the machine be of critical importance to the
computational effort of checking these constraints is quite impor- overall operations, then a more conservative design approach is
tant. Therefore in this work a novel failure surface criterion de- recommended. The designer must set the level of conservative-
scribed in Silva et al. 共2001兲 is used. Use of this new criterion ness balanced against the possible unnecessary expense.
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002 / 1471
J. Struct. Eng. 2002.128:1470-1479.
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
Fig. 2. Typical plate
Fig. 3. Plate triangular finite element
Structural Analysis
relative to a local coordinate system. The displacement vector for
The finite element procedure is used to develop equations of mo- the node i in the global coordinate system is written as zti
tion for the system consisting of beams, columns, the footing, and ⫽ 关 w i x i y i 兴 . Using the usual shape functions, element stiffness,
the soil. The equations are integrated numerically to determine the and mass matrices, nodal force vector can be generated.
dynamic response of the structure.
Beam and Column Equations
Footing and Soil formulation Consider now the cross section of a beam/column member of a
A typical footing modeled as a plate structure is shown in Fig. 2. three-dimensional framework, as shown in Fig. 4. Such elements
The global reference coordinate system is denoted as 0XY Z. The are referred to as the line elements in this work. L⫽length of the
plate is developed in the 0XY plane. The directions of X, Y, and Z element, while the cross section width is B and height is H. The
are, respectively, the transverse, longitudinal, and vertical direc- cross section geometric properties can be written as A⫽BH
tions of the system. The plate is modeled as an isotropic, homo- 共area兲, I y ⫽BH 3 /12 共moment of inertia related to yy axis兲, I z
geneous, and a linearly elastic material of uniform thickness. The ⫽HB 3 /12 共moment of inertia related to zz axis兲, and J⫽I y ⫹I z
soil system in which the slab foundation is embedded is modeled 共polar moment of inertia兲. The material properties are Young’s
by a system of springs and dashpots. The soil spring constants in modulus E, shear elasticity modulus G, and mass density . The
the X and Y directions are K x and K Y , respectively. K T ⫽soil t
displacement vector for the eth element is ze ⫽ 关 ze t1 ze t2 兴 , where
spring constant related to the rotation about the axis Z. The con- t
stant ⫽soil coefficient of the subgrade reaction; physically, it zei ⫽ 关 u ei v ei w ei exi eyi zi
e
兴 is the displacement at the ith element
represents an elastic spring density per unit area in the Z direc- node. The components u ei , v ei , and w ei are, respectively, the dis-
tion. placements in the x, y, and z directions, while exi , eyi , and zi e
are
A compilation of several procedures to estimate has been the rotations of fibers parallel to the x, y, and z axis, respectively.
performed by Silva et al. 共1999兲. Considering a point in the con- These displacements are given in the local system. The displace-
tact area between the footing and the soil, the spring force F per ment vector of the ith node in the global coordinate system is
unit area is F ⫽ w, where w⫽vertical deflection of the soil– denoted as zti ⫽ 关 u i i w i xi yi zi 兴 . The equations of motion for the
plate interface. The inertial force per unit area is F 1 ⫽hẅ, where axial displacement, bending about two axes, and torsional motion
h⫽plate thickness and ⫽mass density of the plate material.
Using the basic moment-curvature relationships and the theory
of elastic plates on elastic spring foundations we obtain equation
of motion for the plate for transverse displacement 共Shigueme
1995; Zienkiewicz and Taylor 1989兲
Dⵜ 4 w⫹w⫹hẅ⫺q 共 X,Y ,t 兲 ⫽0, ᭙t苸 关 t 0 ,t f 兴 (1)
where D⫽Eh / 关 12(1⫺ ) 兴 , and q(X,Y ,t)⫽load per unit area
3 2
applied to the footing. The foundation, shown in the Fig. 2, is
discretized into several 3-node C 2 triangular plate finite elements
共Fig. 3兲. The local reference coordinate system is 0xyz. Each
plate element is considered in the 0xy plane. A description of the
triangular plate-bending element used in this work can be found
in Zienkiewicz and Taylor 共1989兲 and Shigueme 共1995兲. The dis-
t
placement vector for the element e is ze ⫽ 关 ze t1 ze t2 ze t3 兴 where ze ti
⫽ 关 w ei ex i ey i 兴 is the ith nodal displacement vector. The component
w ei ⫽vertical displacement of the plate at the node i, while exi and
eyi ⫽rotations of a transverse fiber of the plate related to the axis
Fig. 4. Line element, degrees of freedom, and cross section
contained in the plate plane at the node i. These displacements are
1472 / JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002
J. Struct. Eng. 2002.128:1470-1479.
can be derived for the finite element. Again, using the usual shape
functions, element stiffness, and mass matrices, nodal force vec-
tor can be generated. These matrices are given in Tedesco et al.
共1999兲, while the force vector is given in Zienkiewicz and Taylor
共1989兲.
The relationship between the nodal displacements and nodal
internal loads in the line element described above can be written
t
as Fe ⫽Ke ze where Fe ⫽ 关 Ft1 Ft2 兴 , Fti ⫽ 关 N i V yi V zi T i M l yi M l zi 兴 is in-
ternal load vector at the ith node for the eth element, and Ke
⫽element stiffness matrix. Note that N i ⫽normal or axial load,
V yi and V zi ⫽shear loads, T i ⫽torsional moment, and M lyi and
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
l
M zi ⫽flexural moments. In case of columns, generally structural
design codes require the increment of flexural moment due to
l
second order effects; i.e., for M zi and M lyi . A simplified procedure Fig. 5. Typical cross section of line element and plate
described in NB-1 共1978兲, the Brazilian code for design and con-
struction of reinforced concrete structures, was used to calculate
this additional moment.
stress calculations for concrete and steel are described. All these
considerations and specifications are based on NB-1 共1978兲; how-
Global Equation of Motion
ever, any other code can be used.
Assembling the element level mass and stiffness terms, we can
Fig. 5 shows a typical concrete line element and a plate. In
build a global system of equations in the matrix form that in-
Fig. 5共a兲, B⫽width, H⫽height, A s and A ss ⫽respectively, longi-
volves all the structure degrees of freedom 共Zienkiewcz and Tay-
tudinal and transverse steel areas, and c⫽cover of longitudinal
lor, 1989兲
reinforcement, for beams and columns. In Fig. 5共b兲, h
Mz̈⫹Kz⫽p共 t 兲 , ᭙t苸 关 t 0 ,t f 兴 (2) ⫽thickness, A sx and A sy ⫽longitudinal steel area perpendicular to
the y and x axes, respectively, and c p ⫽reinforcement cover, for
To complete the dynamic analysis, it is necessary to compute plates. Elastoplastic behavior of the steel used here is considered
damping effects within the soil and the structure. In this work we with elasticity modulus E s and yield stress f y . This stress must be
consider Rayleigh damping, as divided by a factor ␥ s ⬎1 to get the steel design stress f yd
C⫽a 0 M⫹a 1 K (3) ⫽ f y /␥ s . The strain corresponding to this stress is yd ⫽ f yd /E s .
The distribution of strains on the cross section is linear. The con-
where a 0 and a 1 ⫽proportionality parameters, determined from crete and steel strains are, respectively, s and c . The maximum
the simultaneous solution of the expression tensile strain in steel is smax⫽1% and the maximum compressive
冉 冊 c ⫽0.35%. The elasticity modulus of con-
strain in concrete is max
a0
r⫽ ⫹a 1 r (4) crete is E. The characteristic stress for concrete is f ck 共this is the
r maximum stress allowable for concrete considering 5% probabil-
for two specified values of r and r . These are, respectively, the ity of failure under this value兲. This stress must be divided by a
damping factor and the natural vibration frequency corresponding factor ␥ c ⬎1 to get the concrete design stress f cd ⫽ f ck /␥ c . The
to the rth normal mode of vibration. Then the global system of distribution of stress on concrete is the parabola-rectangular dia-
equations of motion is written as gram as described in Sussekind 共1979兲. As is done traditionally,
the tensile stress in concrete is neglected.
Mz̈⫹Cż⫹Kz⫽p共 t 兲 , ᭙t苸 关 t 0 ,t f 兴 (5) Consider the plate section shown in Fig. 5共b兲. The classical
process to design reinforced concrete plates is based on the three
In most structural problems, z is composed of two parts: the
equations given below.
static displacement zs due to the static loads ps plus the dynamic
共i兲 The plate useful thickness, d⫽h⫺c p
displacement zd due to the dynamic loads pd , which can be writ-
ten as z⫽zs ⫹zd and p⫽ps ⫹pd . In order to calculate the static d⫽ 1 冑␥ f 兩 M max兩 (7)
displacement we need to solve the system: Kzs ⫽ps . The dy-
where M max⫽max(M xi ;M yi)⫽maximum flexural moment acting
namic system in Eq. 共5兲 is now given as
in the plate at the ith node 共characteristic moment兲 and ␥ f ⬎1 is a
Mz̈d ⫹Cżd ⫹Kzd ⫽pd 共 t 兲 , ᭙t苸 关 t 0 ,t f 兴 (6) load factor to get the design strength.
共ii兲 Steel areas in the cross section perpendicular to the y and x
Note that every component of z has two parts: a static part and a axes are, respectively
dynamic part. It is possible to simulate the static load as a dy-
namic load with a long time of application, but this process is ␥ f 兩 M xi 兩 ␥ f 兩 M yi 兩
A sx ⫽ 2 ; A xy ⫽ 2 (8)
very expensive from a computational point of view. The equations d d
of motion 共6兲 are solved using standard techniques that are pre-
The coefficients  1 and  2 depend on the characteristic stress in
sented, for example, in Tedesco et al. 共1999兲.
concrete f ck , the coefficient ␥ c , the steel and concrete strains ( s
and c ), the steel yield stress f y , and the coefficient ␥ s . The
Reinforced Concrete Design maximum steel area allowed in this cross section is 4.0% h, while
the minimum area is 0.15% h.
In this section we shall present all the specifications related to the Consider the cross section of a line element, as described in
reinforced concrete design. Also stress-strain relationship for steel Fig. 5共a兲. The transverse steel for shear strength and torsional
and concrete, mechanical properties of concrete and steel, and the strength are calculated using the expressions
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002 / 1473
J. Struct. Eng. 2002.128:1470-1479.
␥ fVk ␥ fTk ⫽footing settlement under that pressure. The physical constant
V
A ss ⫽ ; T
A ss ⫽ (9) generally depends on the footing dimensions, shear modulus of
z f yd 2A l f yd
soil G s and the Poisson’s ratio of soil s . For embedded footing,
where V k ⫽shear load and z⫽I/m 0 , with I⫽moment of inertia an expression to calculate the coefficient of subgrade reaction was
related to neutral axis and m 0 ⫽first moment about the neutral presented by Arya et al. 共1978兲:
axis of the area above or below the neutral axis, T k ⫽torsional
moment and A l ⫽area, with external perimeter u, of the ideal G s  w w lx
⫽ ;  w ⫽0.07778 ⫹2.07222;
section for designing for torsion, as described in Sussekind 1⫺ s 冑4l x l y ly
共1979兲. In this work we considered A l ⫽5/6B(H⫺B/6) and u
⫽2(H⫹2/3B). Note that the areas obtained in Eq. 共9兲 need to be 0.6共 1⫺ s 兲 h (13)
added to obtain the total area A ss . Another important observation w ⫽1⫹
冑4l x l y /
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
is that we have two shear loads V y and V z . The steel area corre-
sponding to each load is calculated and later added to obtain the Here  w and w ⫽nondimensional coefficients related to the foot-
total area. This procedure is a little conservative, but quite simple ing dimensions and the soil Poisson’s ratio s . Arya et al. 共1978兲
to implement. The minimum volume of the torsion steel in the also presented the following soil elastic constants parallel to tor-
entire element is 0.14% of the ideal prism volume 共Sussekind sional, transverse, and longitudinal directions:
冑
1979兲. To design completely for the torsional moment, it is nec-
essary to adopt another steel area, the longitudinal steel area for 16G s r 30 4 l x l y 共 l 2x ⫹l 2y 兲
K T⫽ ; r 0 ⫽2 (14)
torsion 3 6
u␥ f T k K X ⫽4 共 1⫹ s 兲 G s  x xy 冑l x l y ;
A Ts ⫽ (10) (15)
2A l f yd
K Y ⫽4 共 1⫹ s 兲 G s  y xy 冑l x l y
After calculating the steel area for shear load and torsional
moment it is necessary to compute the concrete stress due to these where r 0 is the footing equivalent radius, and
strengths. A simple expression that can be used for this verifica- lx
tion is given in NB-1 共1978兲 as  x ⫽0.02105 ⫹0.98947
ly
td wd
⫹ ⫺1⭐0 (11) ly
tu wu  y ⫽0.02105 ⫹0.98947 (16)
lx
␥ fTk ␥ fVk
td ⫽ , tu ⫽0.22 f cd , wd ⫽ , wu ⫽0.25f cd 0.55共 2⫺ s 兲 h
2A l e Ac xy ⫽1⫹
(12) 冑4l x l y /
In Eq. 共12兲 A c ⫽B(H⫺c) is the useful concrete area of the cross are nondimensional coefficients related to the footing dimensions
section and e⫽B/6. The values of tu and wu must be, respec- and the soil Poisson’s ratio. The masses associated with K X , K Y ,
tively, smaller than 3.92 and 4.41 MPa. and K T are, respectively
The verification of the longitudinal steel area in line elements
4
subjected to biaxial bending and axial load will be treated in m X ⫽m Y ⫽4hl x l y ; m T ⫽ hl x l y 共 l 2x ⫹l 2y 兲 (17)
‘‘Biaxial Moment and Axial Load Constraints’’ considering a new 3
failure surface and a new failure criterion developed by the au- Generally and s can be determined as functions of the
thors. standard penetration test value 共Carter 1983兲, usually abbreviated
as N S PT . An expression for in MN/m3, is ⫽2N S PT . Bowles
共1996兲 has given an expression for the allowable bearing capacity
Soil Parameters
of soil under a rectangular footing in terms of N S PT , h, and l x .
A close interaction exists between the structure and its support However, in the present work, s is considered as given data.
共foundation and soil兲. The load on the structure is transmitted to
the foundation and the soil. A part of the work of the load applied Optimal Design: Problem Formulation
to the soil is stored in the form of strain energy, and damping due
to friction dissipates the remaining part. The physical constants
Design Variables and Cost Function
involved in this problem are functions of the soil geotechnical
parameters. Therefore knowledge of the soil representative prop- The design variables for a problem are the ones that define the
erties is required for structural and foundation analysis. Generally, system. Let b⫽ 关 b 1 b 2 ¯b n 兴 t represent a design variable vector,
the following information is required: Poisson’s ratio of soil, s ; where n⫽total number of design variables. In this work, we are
shear modulus of soil, G s , at several levels of strain 共or magni- dealing with structures having specified geometric configuration
tude of bearing pressure兲; coefficient of subgrade reaction of soil, and material. Therefore only structural dimensions and steel area
, if above parameters are not accurately known; and allowable are the design variables. Thus the design variables related to the
bearing capacity of soil, s , which is a function of the soil footing design are btf ⫽ 关 hA sx A sy l x l y 兴 , where h⫽plate thickness,
strength properties 共friction angle s and cohesion c s ), the system A sx and A sy ⫽steel areas in the cross section perpendicular to axis
foundation geometry, and ␥ so . y and x, respectively, and 2l x and 2l y ⫽plate sides length. The
The main parameters used in the analysis and design process design variables vector for the eth line element is btle
are and s . They can be determined by field or laboratory tests. ⫽ 关 B e H e A se A sse 兴 , where B e and H e ⫽respectively, width and
The coefficient of subgrade reaction, , can be defined as the rate height of the cross section, and A se and A sse ⫽respectively, lon-
q s /⌬, where q s ⫽pressure applied on the footing and ⌬ gitudinal reinforcement steel area and transverse reinforcement
1474 / JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002
J. Struct. Eng. 2002.128:1470-1479.
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
Fig. 6. Structure design
steel area. The footing is discretized into n no nodes and n e ele- Design Constraints
ments, and the framework is discretized into n pe line elements
with n pno nodes. Then the entire design variable vector is given as For structures subjected to dynamic loads, the constraints are
bt ⫽ b btf btl1 ¯btl npe c . grouped into two types: static and dynamic constraints. The static
The objective function that determines the relative merits of constraints are imposed on dimensions of structural elements, the
various designs 共Arora 1989兲 is the construction cost of the struc- steel areas, static displacement and differential displacement,
ture. We consider the costs of concrete, steel, form, and propping stress in soil, and natural frequencies of vibration. These are ex-
form. Determination of the concrete cost is direct, because it is pressed as
proportional to the structural volume. Computation of the steel minimum footing thickness: h⭓h l (23)
cost demands a larger computational effort because the determi-
nation of the steel is not trivial, especially in the line elements. It minimum and maximum value for A sx :
is function of the stresses within the structure. The costs of form 0.0015h⭐A sx ⭐0.04h (24)
and propping form are proportional to external structure surface
area. minimum and maximum value for A sy :
The problem is to minimize the cost of the structure shown in
0.0015h⭐A sy ⭐0.04h (25)
Fig. 6. This structure is composed of footing, columns, and
beams. The cost function for the problem is f (b), given as minimum value for l x and l y : l x ⭓l x min ;l y ⭓l y min (26)
f 共 b兲 ⫽C c ⫹C s ⫹C f ⫹C p f (18)
main natural vibration frequency: 0.5⭓ 1 /⍀ ⭓1.5 (27)
where C c , C s , C f , and C p f ⫽respectively, costs of concrete,
maximum footing static displacement:
steel, form, and propping form:
再
footing:4l x l y hc c
C c ⫽ line element e:B H L c
e e e c
(19)
兩 w si 兩 ⭐z su , i⫽1,...,n no
maximum footing static differential displacement:
(28)
再
footing: 关 2 共 l x A sx ⫹l y A sy 兲 s 兴 c s
C s ⫽ line element e: A ⫹2A
关 se sse 共 B e ⫺2c⫹H e ⫺2c 兲兴 L e s c s
兩 w si ⫺w s j 兩 ⭐d su ,
maximum static bearing capacity:
i⫽1,...,n no , j⫽i⫹1,...,n no (29)
再
(20)
footing: 关 4l x l y ⫹4h 共 l x ⫹l y 兲兴 c f 兩 w si 兩 ⭐ s /␥ ss , i⫽1,...,n no (30)
C f ⫽ beam e: 共 B e ⫹2H e 兲 L e c f (21) verification of the minimum longitudinal steel area for line ele-
column e: 共 B e ⫹H e 兲 2L e c f ments:
C p f ⫽ 兵 beam e:B e L e c p f (22) beam e:A se ⭓0.0015B e H e , e⫽1,...,n pe
In these expressions c c ⫽concrete cost per unit volume, s (31)
column e:A se ⭓0.005B e H e , e⫽1,...,n pe
⫽steel density, c s ⫽steel cost per unit mass, c f ⫽form cost per
unit area, c p f ⫽propping form cost per unit area, and L e ⫽eth verification of the maximum longitudinal steel area for line ele-
element length. ments
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002 / 1475
J. Struct. Eng. 2002.128:1470-1479.
element e:A se ⭐0.04B e H e , e⫽1,...,n pe (32) verification of longitudinal steel for torsional moments for every
line element:
verification of the minimum transverse steel area for line elements
A se ⭓A Ts , e⫽1,...,n pe (47)
0.0007B e H e
element e:A sse ⭓ , e⫽1,...,n pe (33) maximum dynamic bearing capacity:
B e ⫹H e ⫺4c
It is also necessary to impose constraints on the static displace- 兩 w di ⫹w si 兩 ⭐ s /␥ ds , i⫽1,...,n no (48)
ment in columns and beams: Machine and environmental requirements define the minimum
1. A beam supported by columns cannot have lateral displace- and maximum values of l x and l y . The maximum static displace-
ment larger than D/300, where D⫽distance between the col- ment allowed is z su ⫽min(lx ;ly)/10, and the maximum static dif-
umns. ferential displacement is d su ⫽min(lx ;ly)/100. The constraints
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
2. Lateral displacement of a column cannot exceed L/150, 共34兲–共39兲 and 共42兲–共44兲 contemplate human comfort, as well as
where L⫽column length. machine conditions and structural damage. The limits on dis-
Dynamic constraints need to be imposed over the entire time placements, velocities, and accelerations were taken from the
interval t苸 关 t 0 ,t f 兴 . The predicted behavior of the structures is graphs in Arya et al. 共1978兲.
checked or compared with a number of design requirements,
many of which come from design codes. The dynamic constraints Biaxial Moment and Axial Load Constraints
imposed are
The verification of the longitudinal steel area in line elements
maximum footing displacement: subjected to biaxial flexural moment and axial load was done
using a procedure developed by the authors 共Silva et al. 2001兲.
兩 w di 兩 ⭐z du , i⫽1,...,n no (34) Consider the strengths obtained from the structural analysis: the
axial load N⬅N i , and the flexural moments M a ⬅M lyi and M b
兩 u dp 兩 ⭐z du ; 兩 dp 兩 ⭐z du (35)
⬅M zil
, that compose the point (N,M a ,M b ) in the three-
maximum footing velocity: dimensional space. The resultant moment is M r and
⫽arctan(M b /M a)⫽angle between the direction of M r and a axis.
兩 ẇ di 兩 ⭐ u , i-1,...,n no (36)
Let N ut and N uc ⫽the maximum values of tension and com-
兩 u̇ dp 兩 ⭐ u ; 兩 ˙ dp 兩 ⭐ u (37) pression that can be assumed by N when M a ⫽M b ⫽0, with N
⬎0 for tension and N⬍0 for compression. Let N c ⫽1/2(N ut
maximum footing acceleration: ⫹N uc ) and N r ⫽1/2(N ut ⫺N uc ); let M ua ⫽the maximum value
兩 ẅ di 兩 ⭐a u , i⫽1,...,n no (38) assumed by M a when M b ⫽0 and N⫽N c ; let M ub ⫽the maxi-
mum value assumed by M b when M a ⫽0 and N⫽N c . Authors
兩 ü dp 兩 ⭐a u ; 兩 ¨ dp 兩 ⭐a u (39) have developed the following failure surface for members sub-
jected to biaxial bending and axial loads:
verification of Eq. 共7兲:
d⭓ 1 冑␥ f 兩 M xi 兩 ; d⭓ 1 冑␥ f 兩 M yi 兩 , i⫽1,...,n no (40) 冉 冊 冉 冊 冉
Ma
M ua
␣1
⫹
Mb
M ub
␣2
⫹
N⫺N c
Nr 冊 ␣3
⫺1.0⫽0 if N⬎N c
verification of Eq. 共8兲: (49a)
A sx ⭓
␥ f 兩 M xi 兩
 2d
; A sy ⭓
␥ f 兩 M yi 兩
 2d
, i⫽1,...,n no (41) 冉 冊 冉 冊 冉
Ma
M ua
␣1
⫹
Mb
M ub
␣2
⫹
兩 N⫺N c 兩
Nr 冊 ␣4
⫺1.0⫽0 if N⭐N c
(49b)
maximum framework node displacement:
where the exponents ␣ 1 , ␣ 2 , ␣ 3 , and ␣ 4 were determined using
兩 w di 兩 ⭐z du ; 兩 u di 兩 ⭐z du an optimization procedure. They depend on the cross section di-
(42) mensions, amount and distribution of steel reinforcement, stress-
兩 di 兩 ⭐z du , i⫽n no ⫹1,...,n no ⫹n pno strain characteristics of steel and concrete, concrete cover, and
maximum framework node velocity: size of lateral ties or spiral. When Eq. 共49a兲 or 共49b兲 is equal to
zero, the point (N,M a ,M b ) is on the failure surface; when it is
兩 ẇ di 兩 ⭐ u ; 兩 u̇ di 兩 ⭐ u smaller than zero, the point is below the failure surface; and when
(43) it is larger than zero, the point is outside the failure surface and
兩 ˙ di 兩 ⭐ u , i⫽n no ⫹1,...,n no ⫹n pno
the reinforced concrete element violates the failure constraint.
maximum framework node acceleration: Note that in Eqs. 共49a兲 and 共49b兲, the values of N, M a , and M b
are available from structural analysis and the values of M ua ,
兩 ẅ di 兩 ⭐a u ; 兩 ü di 兩 ⭐a u M ub , N ut , and N uc are calculated from geometry of the section.
(44)
兩 ¨ di 兩 ⭐a u ,i⫽n no ⫹1,...,n no ⫹n pno In the first formulation, the exponents ␣ 1 , ␣ 2 , ␣ 3 , and ␣ 4 are
calculated such that Eq. 共49a兲 or 共49b兲 is always conservative
verification of transverse steel for every node of every line ele- 共i.e., the approximate surface is inside the real surface兲. This is
ment: accomplished by imposing additional constraints on the error be-
tween the real surface and the approximate surface. In the second
A ss e ⭓A ss
V
⫹A ss
T
, e⫽1,...,n pe (45)
formulation, they are calculated to just minimize the sum of
verification of Eq. 共11兲 for every line element: squares of the errors between the real surface and the approximate
surface. This may not give conservative yield surface approxima-
td wd tion everywhere. Optimal solutions with both of these approaches
⫹ ⭐1 (46)
tu wu are obtained and compared later in the paper.
1476 / JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002
J. Struct. Eng. 2002.128:1470-1479.
Table 1. Initial Design for Footing Table 2. Initial Design for Line Elements
h 共cm兲 A sx 共cm 兲2
A sy 共cm 兲 2
l x 共dm兲 l y 共dm兲 Element B e 共cm兲 H e 共cm兲 A se 共cm2兲 A sse 共cm2/m兲
91.44 13.72 13.72 36.58 45.72 127 91.44 60.96 27.87 2.00
128 91.44 60.96 27.87 2.00
129 91.44 60.96 8.36 2.00
130 91.44 60.96 8.36 2.00
A failure criterion related to Eq. 共49a兲 or 共49b兲 can be repre- 131 60.96 91.44 8.36 2.00
sented by the following time dependent constraints that are im- 132 60.96 91.44 8.36 2.00
posed along with Eqs. 共34兲–共48兲: 133 60.96 91.44 8.36 2.00
冉 冊 冉 冊 冉
Ma ␣1
⫹
Mb ␣2
⫹
N⫺N c
冊 ␣ 3 ,␣ 4
⫺1⭐0
134 60.96 91.44 8.36 2.00
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
M ua M ub Nr 135 91.44 91.44 12.54 2.00
136 91.44 91.44 12.54 2.00
᭙t苸 关 t 0 ,t f 兴 (50) 137 91.44 91.44 12.54 2.00
It may happen that the steel area necessary to satisfy Eq. 共49a兲 138 91.44 91.44 12.54 2.00
or 共49b兲 is very small or very large. The codes require that the 139 91.44 91.44 12.54 2.00
minimum steel area allowed is 0.15%BH for beams and 0.5%BH 140 91.44 91.44 12.54 2.00
for columns 关Eq. 共31兲兴, and the maximum steel area allowed is 141 91.44 91.44 12.54 2.00
4.0%BH for beams and columns 关Eq. 共32兲兴. Another procedure 142 91.44 91.44 12.54 2.00
adopted here is that if the value of A s is larger than the value of 143 91.44 91.44 41.81 2.00
A sT , then the steel area A sT is neglected 关Eq. 共47兲兴. 144 91.44 91.44 41.81 2.00
145 91.44 45.72 20.90 2.00
146 91.44 45.72 20.90 2.00
Numerical Examples
The structure was optimized in two ways: first by considering
the approximated failure surface to be always conservative and
Computational Procedures
second by not requiring it to be always conservative 共Silva et al.
A computer program based on the augmented Lagrangain method 2001兲. The failure surface was approximated using 79 points for a
was developed to solve the dynamic response optimization prob- quarter of the failure surface for every example analyzed 共the
lem. The method has been judged to be effective for such optimi- quarter where M a and M b were positive兲. This could be done due
zation problems 共Arora et al. 1991; Chahande and Arora 1994兲. to the failure surface symmetry. The values of  1 and  2 are,
Numerical methods used at different stages of the solution pro- respectively, 0.0699 and 39,100. We considered f ck ⫽18 MPa,
cess are: 共1兲 Newmark’s method was used to solve the equation of ␥ c ⫽1.4; the steel CA-50 with f y ⫽490.5 MPa, ␥ s ⫽1.15, s
motion 共6兲; 共2兲 the conjugate gradient method with Armijo line ⫽7,850 kg/m3 , ⫽2,500 kg/m3 , E⫽21.55 GPa, Es
search for unconstrained minimization; 共3兲 the forward finite dif- ⫽206.01 GPa, c p ⫽3.0 cm, c⫽2.5 cm, h l ⫽0.50 m, l x min
ference method to calculate the gradient vector; 共4兲 the Simpson ⫽1.0 m, l y min⫽4.57 m, ⍀⫽727.7 rad/s, ␥ f ⫽1.4, ␥ ss ⫽2.0, ␥ ds
rule to calculate integrals; 共5兲 the inverse vector iteration to cal- ⫽4/3, G s ⫽44,833,839.7 Pa, s ⫽0.45, s ⫽95,760 Pa, z du
culate the main natural frequency of vibration 共Tedesco et al. ⫽0.006 mm, u ⫽0.0127 m/s, and a u ⫽3.92 m/s2 . The length of
1999兲; and 共6兲 the Cholesky decomposition to solve linear sys- columns is L⫽5.18 m. To obtain the Rayleigh damping matrix
tems 共Atkinson 1993兲. we calculated a 0 and a 1 considering a damping factor of 15% for
the first and of 5% for the fourth mode of vibration. The initial
time is t 0 ⫽0.0 s and the final time is t f ⫽0.0863 s. This time
Problem Data
interval was discretized into 120 grid points. To compute the cost
The discretized structure is shown in Fig. 6, where the plate is function we considered c c ⫽US$105.56/m3 , c s ⫽US$1.44/kg, c f
discretized with n no ⫽80 nodes and n e ⫽126 elements 共geometri- ⫽US$27.78/m2 , and c p f ⫽US$19.44/m2 . These include the ma-
cally identical兲, and the framework is discretized in n pe ⫽20 line terial and the construction costs; they do not include construction
elements with n pno ⫽13 nodes. The dynamic model thus obtained administrative costs.
has 321 degrees of freedom. The total number of design variables The initial design adopted for solving the problem is shown in
is 85; 5 related to the footing and 80 related to the framework. Table 1 for the footing and in Table 2 for the line elements. This
The total number of static and dynamic constraints are 3,413 and design results in an initial cost of US$ 19,738.30.
863, respectively.
The external static loads applied on the structure are due to the
Numerical Results
structure weight and the motor weight. The structure weight is
applied to the nodes according to the node influence. The machine The problem was solved on a 500 MHz PC. The results shown in
weight is applied to some nodes: node 81, p sz ⫽120,251 N; node Tables 3 and 4 were obtained by considering that the approxima-
83, p sz ⫽120,251 N; node 87, p sz ⫽202,645 N; node 89, p sz tion for the failure surface was always conservative. The results
⫽48,991 N; node 90, p sz ⫽48,991 N; and node 92, p sz shown in Tables 5 and 6 were obtained by simply
⫽126,932 N. The external dynamic load is due the motor dy-
namic harmonic excitation with frequency ⍀. This load is applied Table 3. Final Design for Footing, Failure Surface Approximation is
along the motor axis as: node 82, p dz (t)⫽636.35 sin(⍀t) and always Conservative
p dx (t)⫽636.35 cos(⍀t); node 87, p dz (t)⫽17,978 sin(⍀t) and h 共cm兲 A sx 共cm2兲 A sy 共cm2兲 l x 共cm兲 l y 共cm兲
p dx (t)⫽17,978 cos(⍀t); and node 92, p dz (t)⫽17,341.65 sin(⍀t)
76.15 11.50 11.57 526.9 481.7
and p dx (t)⫽17,341.65 cos(⍀t).
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002 / 1477
J. Struct. Eng. 2002.128:1470-1479.
Table 4. Final Design for Line Elements, Failure Surface Approxi- Table 6. Final Design for Line Elements, Failure Surface Approxi-
mation is always Conservative mation may or may not be Conservative
Element B e 共cm兲 H e 共cm兲 A se 共cm 兲2
A sse 共cm /m兲
2
Element B e 共cm兲 H e 共cm兲 A se 共cm2兲 A sse 共cm2/m兲
127 85.27 51.46 22.02 2.61 127 85.25 50.78 22.01 6.02
128 85.06 51.47 22.02 2.62 128 85.02 51.00 22.01 4.42
129 86.19 53.61 51.32 3.14 129 75.70 37.53 62.99 1.93
130 86.11 52.81 48.69 3.13 130 75.96 36.72 61.09 1.90
131 54.82 86.65 48.85 2.91 131 39.37 77.08 62.30 2.13
132 54.98 86.74 48.86 2.72 132 39.49 77.09 62.40 2.13
133 56.13 87.41 48.07 2.70 133 42.36 78.76 63.13 2.29
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
134 56.21 87.45 48.06 3.28 134 42.62 78.92 63.16 2.16
135 113.29 124.86 83.66 12.80 135 105.95 138.56 196.83 4.63
136 113.62 119.24 72.48 5.49 136 122.12 141.51 162.20 7.19
137 88.37 86.96 48.65 5.92 137 76.73 73.64 79.61 3.06
138 88.44 87.07 48.63 5.93 138 77.15 74.05 79.61 2.85
139 88.18 87.19 48.44 3.48 139 75.57 73.38 78.74 3.77
140 88.04 87.05 48.45 18.86 140 76.22 73.93 78.75 3.28
141 110.49 130.95 84.8 11.38 141 99.04 146.37 175.98 4.70
142 113.71 129.17 74.34 7.86 142 111.41 148.07 151.48 6.05
143 82.20 81.50 35.72 9.79 143 89.30 81.84 50.68 3.44
144 83.43 82.14 37.26 20.78 144 95.13 86.46 45.47 5.59
145 91.13 37.77 23.56 2.97 145 102.87 48.54 25.73 5.17
146 93.31 40.58 27.15 4.06 146 110.26 54.92 31.11 10.00
minimizing the approximation errors, and so the approximate sur- solve the optimization problem. In that method, a composite func-
face could be unconservative at some points. tional was constructed by combining the cost and the constraint
These results shown in Tables 3 and 4 were obtained in 13 functions. Thus a large number of static and dynamic constraints
iterations and spent 341,112 s of total CPU time. The cost of the in the present problem were treated without much difficulty. A
final design was US$ 25,900.01. forward finite difference method was used to calculate the deriva-
The results shown in Tables 5 and 6 were obtained in 13 itera- tives of the composite functional that were needed in the minimi-
tions and spent 301,907 s of total CPU time. The cost of the final zation algorithm.
design was US$ 24,613.07. To overcome the problem of large computational time needed
As expected, the design with conservative failure surface con- for verification of the bending capacity of line elements over the
straint is slightly more expensive compared to the one with less time domain, an empirical failure surface proposed by the authors
conservative approximation. Also note that the final designs ob- 共Silva et al. 2001兲 that approximates the real failure surface was
tained with the two formulations are quite different from each used. The approximation was done in two ways: one required the
other. For example: A sx for footing final design is 46% different; empirical failure surface to be always conservative, and the other
B e for element 132 design is 39% different. allowed the surface to be unconservative while minimizing the
error between the real surface and the empirical surface.
From the results, it is observed that the adoption of different
Discussion and Conclusions failure surfaces does not give much different final costs, even
though it gives different final designs. It is noted here that the
In this paper, optimal design of reinforced concrete 共RC兲 struc- bending capacity of every line element could have been checked
tures subjected to dynamic loads was considered. Specifically, the using the traditional process of integration of the stress. However,
problem of design of elevated foundations for support of vibra- that process would have taken more than 40 days to solve the
tory machines was formulated as an optimization problem. The example problem on a 500 MHz PC compared to less than 4 days
design system consisted of a foundation modeled as an RC plate, used with the proposed approximate surface. It is concluded that
and columns and beams modeled as line elements. Interaction of it is possible to optimize in an integrated way structures and foun-
the foundation with the soil under it was included in the formu- dation for dynamic loading environment in a reasonable compu-
lation. Static as well as dynamic loads were treated. Constraints tational time.
related to human comfort, strength, and stiffness were checked in For further work, the following studies and analyses are sug-
the solution process. Many of the constraints were time- gested:
dependent. Time history of such constraints was treated in the 1. Development of a more realistic cost function for the prob-
solution process. The augmented Lagrangian method was used to lem.
2. Utilization of a more efficient adjoint variable method to
calculate derivatives of the augmented Lagrangian func-
Table 5. Final Design for Footing, Failure Surface Approximation tional. This would reduce the computational time roughly by
may or may not be Conservative a factor of the number of design variables compared to the
h 共cm兲 A sx 共cm2兲 A sy 共cm2兲 l x 共cm兲 l y 共cm兲 finite difference method.
3. Utilization of the genetic algorithm to solve the same prob-
73.94 20.03 13.82 474.9 457.5
lem and to compare the results obtained.
1478 / JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002
J. Struct. Eng. 2002.128:1470-1479.
4. Use of some approximations in the formulation to further Haug, E. J., and Arora, J. S. 共1979兲. Applied optimal design, Wiley-
reduce the computational effort. For example, the steel areas Interscience, New York.
could be eliminated as design variables by assuming that for Kocer, F., and Arora, J. S. 共1999兲. ‘‘Optimal design of nonlinear struc-
each member, either the strength constraint 关Eq. 共49a兲 or tures subjected to dynamic loads with application to transmission line
共49b兲兴, the minimum steel constraint, or the maximum steel structures.’’ Technical Rep. No. ODL-99.02, Optimal Design Labora-
constraint controls. This would also reduce the number of tory, College of Engineering, The University of Iowa, Iowa City,
constraints for the problem, and the optimization process Iowa.
would focus on determining the member dimensions that Llambias, J. M. 共1993兲. ‘‘Validation of seismic soil structure interaction
affect stiffness of the structure. 共SSI兲 methodology for a UK PWR power station.’’ Proc., 12th Inter-
national Conf. on ‘‘Structural Mechanics in Reactor Technology,’’
Vol. A, Stuttgart, Germany, 213–218.
Acknowledgments Roddis, W. M. K., and Chunnanond, V. 共1996兲. ‘‘Genetic algorithms ap-
Downloaded from ascelibrary.org by KANSAS STATE UNIV LIBRARIES on 06/15/14. Copyright ASCE. For personal use only; all rights reserved.
plied to single-criteria optimization of reinforced concrete design and
This work was accomplished under a project sponsored by detailing,’’ SL Rep. No. 96-1, University of Kansas Center for Re-
CAPES, a Brazilian agency for research, Project No. BEX0013/ search, Lawrence, Kan.
99-4. The research was completed when M. A. da Silva was a Roddis, W. M. K., Lucas, W. K., and Chunnonond, V. 共1996兲. ‘‘Single-
criteria genetic optimization for design and detailing of concrete struc-
visiting scholar in the Department of Civil and Environmental
tures.’’ Proc., Computing Congress III, ASCE, Anaheim, CA.
Engineering from May 1999 to April 2000. A great part of the
Shigueme, P. 共1995兲. ‘‘Análise de vibrações livres em torno de configu-
research was also done using resources of the Optimal Design
rações deformadas em placas de comportamento geometricamente
Laboratory and The University of Iowa.
não-linear pelo método dos elementos finitos.’’ PhD thesis 共in Portu-
guese兲, Polytechnic School of The University of Sao Paulo, São
Paulo, Brazil.
References Silva, M. A., Arora, J. S., Swan, C. C., and Brasil, R. M. L. R. F. 共1999兲.
‘‘Optimization of footing under vibratory loading.’’ Technical Rep.
Arora, J. S. 共1989兲. Introduction to optimal design, McGraw-Hill, New No. ODL-99.11, Optimal Design Laboratory, The University of Iowa,
York. Iowa City, Iowa.
Arora, J. S. 共1999兲. ‘‘Optimization of structures subjected to dynamic Silva, M. A., and Brasil, R. M. L. R. F. 共1999a兲. ‘‘Augmented lagrangian
loads.’’ Structural dynamic systems, computational techniques and optimization of steel plates under dynamic loading.’’ Technical Bulle-
optimization; optimization techniques, C. Leondes, ed., Gordon and tin BT/PEF/9906 of Polytechnic School of The University of Sao
Breach, New York, 1–72. Paulo, São Paulo, Brazil.
Arora, J. S., Burns, S. A., and Huang, M. 共1997兲. ‘‘What is optimization.’’ Silva, M. A., and Brasil, R. M. L. R. F. 共1999b兲. ‘‘Optimization of con-
Guide to structural optimization, J. S. Arora, ed., ASCE Manuals and crete plates under dynamic loading.’’ XX CILAMCE-20th Iberian
Reports on Engineering Practice 90, Reston, Va., 1–24.
Latin-American Congress on Computational Methods in Engineering,
Arora, J. S., Chahande, A. I., and Paeng, J. K. 共1991兲. ‘‘Multiplier meth-
Anais, São Paulo, Brazil.
ods for engineering optimization.’’ Int. J. Numer. Methods Eng., 32,
Silva, M. A., Swan, C. C., Arora, J. S., and Brasil, R. M. L. R. F. 共2001兲.
1485–1525.
‘‘Failure criterion for RC members under biaxial bending and axial
Associação Brasileira de Normas Técnicas 共ABNT兲. 共1978兲. ‘‘Projeto e
Execução de Obras de Concreto Armado 共in Portuguese兲.’’ NB-1, Bra- load.’’ J. Struct. Eng., 127共8兲, 922–929.
zil. Stojko, S. 共1989兲. ‘‘Soil structure interaction analysis in the time domain
Atkinson, K. 共1993兲. Elementary numerical analysis, Wiley, New York. using DYNA3D/ABAQUS.’’ Proc., 10th International Conf. on
Arya, S., O’Neill, M., and Pincus, G. 共1979兲. Design of structures and ‘‘structural mechanics in reactor technology,’’ Vol K, Paper K04/3,
foundations for vibrating machines, Gulf, Houston, Tex. Anaheim, Calif.
Balling, R. J., Gallup, S. S., and McGrath, C. S. 共1997兲. ‘‘How to opti- Stojko, S. 共1990兲. ‘‘NNC/DYNA3D—a modified version of DYNA3D
mize a reinforced concrete column or beam.’’ Guide to structural for general soil structure interaction analysis.’’ Proc., DYNA3D user
optimization, J. S. Arora, ed., ASCE Manuals and Reports on Engi- group conference, Lawrence Livermore National Laboratory, Liver-
neering Practice 90, Reston, Va., 55–73. more, Calif.
Balling, R. J., and Yao, X. 共1997兲. ‘‘How to optimize a reinforced con- Stojko, S. 共1991兲. ‘‘Non-linear soil structure interaction analysis of a
crete frame.’’ Guide to structural optimization, J. S. Arora, ed., ASCE reactor building using NNC/DYNA3D.’’ Proc., DYNA3D user group
Manuals and Reports on Engineering Practice 90, Reston, Va., 123– conference, Lawrence Livermore National Laboratory, Livermore,
138. Calif.
Bowles, J. E. 共1996兲. Foundation analysis and design, 5th Ed., McGraw- Stojko, S. 共1993兲. ‘‘Application of DYNA3D to non-linear soil structure
Hill, New York. interaction 共SSI兲 analyses of retaining wall structures.’’ Proc., 1st In-
Carter, M. 共1983兲. Geotechnical engineering handbook, Pentech, London. ternational LS-DYNA3D Conf., Livermore Software Technology
Chahande, A. I., and Arora, J. S. 共1994兲. ‘‘Optimization of large structures Corp., Livermore, Calif.
subjected to dynamic loads with the multiplier method.’’ Int. J. Numer.
Sussekind, J. C. 共1979兲. Curso de concreto (in Portuguese), Editora
Methods Eng., 37, 413– 430.
Globo, Rio de Janeiro, Brazil.
Das, B. M. 共1990兲. Principles of foundation engineering, PWS-KENT,
Tedesco, J. W., McDougal, W. G., and Ross, C. A. 共1999兲. Structural
Pacific Grove, Calif.
Dieterman, H. A., and Gajewski, R. R. 共1996兲. ‘‘An improved viscous dynamics: Theory and applications, Addison-Wesley Longman,
boundary for dynamic soil-structure interaction.’’ Comput. Assisted Menlo Park, Calif.
Mech. Eng. Sci., 3, 55– 64. Wolf, J. P. 共1994兲. Foundation vibration analysis using simple physical
Fletcher, R. 共1985兲. Practical methods of optimization, Wiley, New York. models, Prentice-Hall, Upper Saddle River, N.J.
Goldenberg, P., Silva, M. A., Pimenta, P. M., and Brasil, R. M. L. R. F. Zhao, C. 共1999兲. ‘‘Applications of infinite elements to dynamic soil-
共1997兲. ‘‘Augmented Lagrangian optimization of a portal frame with structure interaction problems.’’ Developments in geotechnical engi-
elastoplastic behavior under dynamic loading.’’ Proc., 5th Pan- neering, Elsevier Science, Elmont, N.Y., 83.
American Congress on Applied Mechanics, San Juan, Puerto Rico, Zienkiewicz, C., and Taylor, R. L. 共1989兲. The finite element method, 4th
373–376. ed., McGraw-Hill, New York.
JOURNAL OF STRUCTURAL ENGINEERING / NOVEMBER 2002 / 1479
J. Struct. Eng. 2002.128:1470-1479.
You might also like
- Optimal Stiffness Tall Bldgs PDFDocument12 pagesOptimal Stiffness Tall Bldgs PDFErik NelsonNo ratings yet
- Optimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsFrom EverandOptimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsRating: 5 out of 5 stars5/5 (1)
- State-of-the-Art Review of Approaches For The Design of Timber Beams With NotchesDocument13 pagesState-of-the-Art Review of Approaches For The Design of Timber Beams With Notchesnevinkoshy100% (1)
- Islamiyat O-Level Paper-1 Notes PDFDocument126 pagesIslamiyat O-Level Paper-1 Notes PDFddd80% (5)
- Ankit Pathak: Business AnalystDocument3 pagesAnkit Pathak: Business AnalystBibhuPrakashDasNo ratings yet
- Stbu 11 00022Document16 pagesStbu 11 00022Elena MiceliNo ratings yet
- Optimal Design of 2 - and 3-Phase Separators A Mathematical Programming FormulationDocument16 pagesOptimal Design of 2 - and 3-Phase Separators A Mathematical Programming FormulationGabriela Urdaneta100% (1)
- Cisco Start CatalogDocument4 pagesCisco Start CatalogqntttNo ratings yet
- Optimization and Sensitivity of Retaining Structures: by A KM Sarlba L and Fuat ErbaturDocument8 pagesOptimization and Sensitivity of Retaining Structures: by A KM Sarlba L and Fuat ErbaturIngénieurCivilNo ratings yet
- Wa0053 1Document20 pagesWa0053 1ahmed HOSNYNo ratings yet
- (Asce) 0733-9445 (1998) 124 12 (1375)Document43 pages(Asce) 0733-9445 (1998) 124 12 (1375)sepehrNo ratings yet
- Advances in Engineering Software: M.J. Esfandiari, G.S. Urgessa, S. Sheikholare Fin, S.H. Dehghan ManshadiDocument12 pagesAdvances in Engineering Software: M.J. Esfandiari, G.S. Urgessa, S. Sheikholare Fin, S.H. Dehghan ManshadiKuber BogatiNo ratings yet
- Artificial Bee Colony (ABC) For Multi-Objective Design Optimization of CMDocument11 pagesArtificial Bee Colony (ABC) For Multi-Objective Design Optimization of CMMuhammad HussainNo ratings yet
- Optimum Shape and Design of Cooling TowersDocument11 pagesOptimum Shape and Design of Cooling TowerspamelaNo ratings yet
- Fatma Kocer and Jasbir Arora, Z Member, ASCE: Optimal Design of Steel Transmission Poles by Y. SDocument10 pagesFatma Kocer and Jasbir Arora, Z Member, ASCE: Optimal Design of Steel Transmission Poles by Y. SUsman PashaNo ratings yet
- Caseâ Based Preliminary Building Design PDFDocument15 pagesCaseâ Based Preliminary Building Design PDFAlberto Astorayme ValenzuelaNo ratings yet
- PBD FacadeDocument21 pagesPBD FacadeKshitij NashineNo ratings yet
- Numerical Analysis of Composite Steel-Concrete Columns of Arbitrary Cross SectionDocument10 pagesNumerical Analysis of Composite Steel-Concrete Columns of Arbitrary Cross SectionNasar KhanNo ratings yet
- 863-Manuscript File-4856-2-10-20201227Document9 pages863-Manuscript File-4856-2-10-20201227Amanuel GirmaNo ratings yet
- Exam Guide: Structural SystemsDocument20 pagesExam Guide: Structural SystemsBrian Risma ObedencioNo ratings yet
- Modeling, Analysis, and Behavior of Load-Carrying Precast Concrete Sandwich PanelsDocument13 pagesModeling, Analysis, and Behavior of Load-Carrying Precast Concrete Sandwich PanelsAristotle MedinaNo ratings yet
- Design Optimization of Shear Wall High-Rise Building StructuresDocument11 pagesDesign Optimization of Shear Wall High-Rise Building StructuresSachintha WijekoonNo ratings yet
- Comparison of Available Shear Strength Models For Non ConformingDocument16 pagesComparison of Available Shear Strength Models For Non ConformingSaad KhanNo ratings yet
- Gianakopoulos 2 PDFDocument9 pagesGianakopoulos 2 PDFPPPNo ratings yet
- Optimum Design of Trrussed Dome Structures, Salam, Salah 2015Document7 pagesOptimum Design of Trrussed Dome Structures, Salam, Salah 2015DjRacksNo ratings yet
- Ocean Engineering: Matteo Diez, Daniele PeriDocument12 pagesOcean Engineering: Matteo Diez, Daniele PeribeNo ratings yet
- Probabilistic Optimal Design of Rubble-Mound Breakwater: Technical NoteDocument7 pagesProbabilistic Optimal Design of Rubble-Mound Breakwater: Technical NotepradeepNo ratings yet
- Saka 1991Document13 pagesSaka 1991fahmi aballiNo ratings yet
- Fbuil 06 616455Document13 pagesFbuil 06 616455kgapuNo ratings yet
- Pile Design Practice and Seismic Performance Concerns in TaiwanDocument9 pagesPile Design Practice and Seismic Performance Concerns in Taiwanhriveroll2No ratings yet
- Optimization of Nonlinear Inelastic Steel Frames Considering Panel ZonesDocument18 pagesOptimization of Nonlinear Inelastic Steel Frames Considering Panel ZonesGogyNo ratings yet
- Engineering Structures: A. Stanton, A.A. JavadiDocument9 pagesEngineering Structures: A. Stanton, A.A. JavadijhffgghgfbitvbuiggNo ratings yet
- Engineering Structures: Nattapat Wongpakdee, Sutat Leelataviwat, Subhash C. Goel, Wen-Cheng LiaoDocument9 pagesEngineering Structures: Nattapat Wongpakdee, Sutat Leelataviwat, Subhash C. Goel, Wen-Cheng LiaoPhilip Amsal Apriano GintingNo ratings yet
- 1 s2.0 S004579490900008X Main PDFDocument19 pages1 s2.0 S004579490900008X Main PDFaybikeNo ratings yet
- Computers and Structures: Iman Hajirasouliha, Kypros Pilakoutas, Hassan MoghaddamDocument10 pagesComputers and Structures: Iman Hajirasouliha, Kypros Pilakoutas, Hassan MoghaddamGNo ratings yet
- Structural Optimization of Grid Shells - Design Parameters and Combined StrategiesDocument9 pagesStructural Optimization of Grid Shells - Design Parameters and Combined StrategiesGogyNo ratings yet
- A Hybrid Artificial Intelligence Model For Design of Reinforced Concrete ColumnsDocument9 pagesA Hybrid Artificial Intelligence Model For Design of Reinforced Concrete ColumnsAutoDZNo ratings yet
- Computational Modeling of Existing Damage in Concrete Bridge ColumnsDocument6 pagesComputational Modeling of Existing Damage in Concrete Bridge ColumnsBilly ArlimanNo ratings yet
- Surrogate-Based Fragility Analysis and Probabilistic Optimisation of Cable-Stayed Bridges Subject To Seismic LoadsDocument22 pagesSurrogate-Based Fragility Analysis and Probabilistic Optimisation of Cable-Stayed Bridges Subject To Seismic LoadsyzzyitzyNo ratings yet
- A Q4Q4 Continuum Structural Optimization ImplementDocument7 pagesA Q4Q4 Continuum Structural Optimization ImplementjuancarrionmonsalveNo ratings yet
- Stability Analysis and Design of Composite StructuresDocument12 pagesStability Analysis and Design of Composite StructuresJanCarlosPampaVaraNo ratings yet
- Object-Oriented Optimization Approach Using Genetic Algorithms For Lattice TowersDocument10 pagesObject-Oriented Optimization Approach Using Genetic Algorithms For Lattice TowersAlberto Astorayme ValenzuelaNo ratings yet
- Advances in Engineering Software: Hui Lü, Dejie YuDocument11 pagesAdvances in Engineering Software: Hui Lü, Dejie YuDiego JimenezNo ratings yet
- InTech-Optimization of Reinforced Concrete Structures by Simulated AnnealingDocument16 pagesInTech-Optimization of Reinforced Concrete Structures by Simulated AnnealingMahesh YadavNo ratings yet
- 1 s2.0 S0045794917300639 MainDocument15 pages1 s2.0 S0045794917300639 MainkgapuNo ratings yet
- Optimization Methods Applied To Selecting Support Positions in Fixture DesignDocument7 pagesOptimization Methods Applied To Selecting Support Positions in Fixture DesignMohsin RashidNo ratings yet
- Knowledge-Based System On Optimum Design of Liquid Retaining Structures With GeneticDocument23 pagesKnowledge-Based System On Optimum Design of Liquid Retaining Structures With GeneticPiyush GaikwadNo ratings yet
- Structural Performance of Aluminium Members 20170101Document1 pageStructural Performance of Aluminium Members 20170101Ho Wing FungNo ratings yet
- Transiton BoundariesDocument13 pagesTransiton BoundariesShoaib MalikNo ratings yet
- Karthik Mander 2010Document4 pagesKarthik Mander 2010Electronic RaccoonNo ratings yet
- Bai 1994Document17 pagesBai 1994manish469patidarNo ratings yet
- By The ASCE Task Committee On Design Criteria For Composite Structures in Steel and Concrete ABSTRACT: This Commentary Complements The "Proposed Specification For StrucDocument25 pagesBy The ASCE Task Committee On Design Criteria For Composite Structures in Steel and Concrete ABSTRACT: This Commentary Complements The "Proposed Specification For StrucPrapa KaranNo ratings yet
- Consideration of Questions About Beam-Column Joints: Aci Structural Journal Technical PaperDocument10 pagesConsideration of Questions About Beam-Column Joints: Aci Structural Journal Technical PaperMarimuthu KaliyamoorthyNo ratings yet
- SZDFSZDFDocument34 pagesSZDFSZDFDanielRoblesTorresNo ratings yet
- 1 s2.0 S0141029623010726 MainDocument17 pages1 s2.0 S0141029623010726 MainHerliz CallirgosNo ratings yet
- Structural Seismic Design Optimization Frameworks: An OverviewDocument14 pagesStructural Seismic Design Optimization Frameworks: An OverviewAjayvidyanand SharmaNo ratings yet
- (Asce) ST 1943-541X 0000294Document4 pages(Asce) ST 1943-541X 0000294lx nieNo ratings yet
- Geometry and Topology Optimization of Geodesic Domes Using Charged System SearchDocument16 pagesGeometry and Topology Optimization of Geodesic Domes Using Charged System SearchdfmolinaNo ratings yet
- Nonlinear Analysis of In-Filled Steel-Concrete Composite ColumnsDocument12 pagesNonlinear Analysis of In-Filled Steel-Concrete Composite ColumnsJanCarlosPampaVaraNo ratings yet
- Spatial Modeling of Wedge-Splitting Test On Cylindrical Specimens Using FEM SoftwareDocument6 pagesSpatial Modeling of Wedge-Splitting Test On Cylindrical Specimens Using FEM SoftwareSai Asrith PylaNo ratings yet
- Tube Hydro-Forming Process Design Based On Knowledge-Based EngineeringDocument17 pagesTube Hydro-Forming Process Design Based On Knowledge-Based EngineeringhaceneNo ratings yet
- IJCE v13n1p102 enDocument10 pagesIJCE v13n1p102 enAnonymous lKQDfeAHoNo ratings yet
- Jsendh Steng-11798Document14 pagesJsendh Steng-11798José Manuel SoriaNo ratings yet
- Biology-Activity-3 - Growth and Development of PlantDocument3 pagesBiology-Activity-3 - Growth and Development of PlantnelleoNo ratings yet
- Askehave and Nielsen - Digital Genres PDFDocument22 pagesAskehave and Nielsen - Digital Genres PDFChristopher SmithNo ratings yet
- 2006 Amc8Document12 pages2006 Amc8Yuhang HeNo ratings yet
- Human Rights RapDocument4 pagesHuman Rights Rapapi-264123803No ratings yet
- Unit Circle IAKTDocument5 pagesUnit Circle IAKTAnthony KhooNo ratings yet
- 0000 Mathematica at WWUDocument11 pages0000 Mathematica at WWUWilhelm Richard WagnerNo ratings yet
- English NotesDocument39 pagesEnglish NotesNorAini MohamadNo ratings yet
- Elite MindsDocument1 pageElite MindsShivaNo ratings yet
- Vienza: Lighting and SecurityDocument4 pagesVienza: Lighting and SecurityShadi AbdelsalamNo ratings yet
- Chapter 1 and 2Document75 pagesChapter 1 and 2Balamurali SureshNo ratings yet
- The Role of Customer Knowledge Management (CKM) in Improving Organization-Customer RelationshipDocument7 pagesThe Role of Customer Knowledge Management (CKM) in Improving Organization-Customer RelationshipAbdul LathifNo ratings yet
- An Introduction To Uhde Oil & Gas: Thyssenkrupp Uhde - Engineering With IdeasDocument40 pagesAn Introduction To Uhde Oil & Gas: Thyssenkrupp Uhde - Engineering With IdeasHany FathyNo ratings yet
- Once Upon A Time A Hawk Feels in Love With A HenDocument2 pagesOnce Upon A Time A Hawk Feels in Love With A HenJeffri Aritonang100% (1)
- Holy Is The Lord-GDocument1 pageHoly Is The Lord-Gmolina.t4613No ratings yet
- Regulations ON Academic Matters: Tezpur UniversityDocument21 pagesRegulations ON Academic Matters: Tezpur UniversitybishalNo ratings yet
- Business Communication - IIDocument3 pagesBusiness Communication - IIprachi100% (1)
- Cape Police Report - Unattended BodyDocument2 pagesCape Police Report - Unattended BodyNews-PressNo ratings yet
- SC9 Vocab GHI - Buddhism - ClozeDocument2 pagesSC9 Vocab GHI - Buddhism - ClozeBeakerika shortsNo ratings yet
- Unit 1 Hello There!: PAG E Lesson Vocabulary Grammar Listening Track: UNIT 1Document10 pagesUnit 1 Hello There!: PAG E Lesson Vocabulary Grammar Listening Track: UNIT 1Analia SanlongNo ratings yet
- The Wise Old WomenDocument2 pagesThe Wise Old WomenLycoris FernandoNo ratings yet
- ASA 105: Coastal Cruising Curriculum: Prerequisites: NoneDocument3 pagesASA 105: Coastal Cruising Curriculum: Prerequisites: NoneWengerNo ratings yet
- Internal Guide-BE Project Groups 2015-16Document28 pagesInternal Guide-BE Project Groups 2015-16Aravind IyerNo ratings yet
- Background: The Islamic World of Academy of ScienceDocument5 pagesBackground: The Islamic World of Academy of ScienceNusrat MaqboolNo ratings yet
- CHN ReportingDocument24 pagesCHN ReportingMatth N. ErejerNo ratings yet
- From St. Francis To Dante-Translations From The Chronicle of The Franciscan Salimbene, 1221-1288Document489 pagesFrom St. Francis To Dante-Translations From The Chronicle of The Franciscan Salimbene, 1221-1288Jake SalNo ratings yet
- International Human Resource ManagementDocument24 pagesInternational Human Resource ManagementBharath ChootyNo ratings yet
- NSFDCDocument10 pagesNSFDCAniket AhireNo ratings yet