You might also like
- Introduction To Automatic ControlDocument10 pagesIntroduction To Automatic ControlFatih YıldızNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Electro-Pneumatic Control Systems GuideDocument8 pagesElectro-Pneumatic Control Systems GuideIvy Totanes TaborNo ratings yet
- Introduction To Electro-HydraulicsDocument20 pagesIntroduction To Electro-HydraulicsDhiyauZola100% (2)
- MEC2407 Fluid Power Pneumatic ReportDocument12 pagesMEC2407 Fluid Power Pneumatic ReportEdwin Jesu DassNo ratings yet
- PLC Question BankDocument3 pagesPLC Question BankAjay kumarNo ratings yet
- Lecture Notes On Fluid Power Systems: Unit IDocument10 pagesLecture Notes On Fluid Power Systems: Unit ItadiwosNo ratings yet
- TransducersDocument40 pagesTransducersFemi PrinceNo ratings yet
- 1 Introduction To Control SystemsDocument17 pages1 Introduction To Control SystemsMuhammad Farhan100% (1)
- Pneumatic and Hydraulic Actuation SystemsDocument22 pagesPneumatic and Hydraulic Actuation SystemsMukhammad FauzyNo ratings yet
- Automatic Bottle Filling System Using PLC Based Controller: Md. Liton Ahmed, Shantonu Kundu, Md. RafiquzzamanDocument8 pagesAutomatic Bottle Filling System Using PLC Based Controller: Md. Liton Ahmed, Shantonu Kundu, Md. Rafiquzzamanbishal shahNo ratings yet
- Two Marks Questions and AnswersDocument5 pagesTwo Marks Questions and Answerssudhasesh2000No ratings yet
- Class 2: Servomotors - Basics & Working: Ice 3015: Control System ComponentsDocument19 pagesClass 2: Servomotors - Basics & Working: Ice 3015: Control System ComponentsArchit DasguptaNo ratings yet
- ELECTRICAL INSTALLATIONS Task1Document7 pagesELECTRICAL INSTALLATIONS Task1Akmal HazimNo ratings yet
- Introduction To Control SystemDocument33 pagesIntroduction To Control Systemmarina890416No ratings yet
- Introduction of Control Systems and Basic TerminologyDocument12 pagesIntroduction of Control Systems and Basic TerminologyShivaji ThubeNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- CHAPTER 4: PNEUMATIC VALVE REVIEWDocument78 pagesCHAPTER 4: PNEUMATIC VALVE REVIEWPhaM TruoNg QuoC VuNo ratings yet
- Transducer Basics ModifiedDocument78 pagesTransducer Basics ModifiedAmit RegeNo ratings yet
- Basic Pneumatics: Module 2: Air Generation and DistributionDocument15 pagesBasic Pneumatics: Module 2: Air Generation and Distributionanon_444174592No ratings yet
- 1-Which of The Following Is Not Covered Under Mechanical Energy Domain?Document6 pages1-Which of The Following Is Not Covered Under Mechanical Energy Domain?pradnya sadigaleNo ratings yet
- Elect Machine Total 2012Document22 pagesElect Machine Total 2012NGOUNENo ratings yet
- PLC Unit 2-1 PDFDocument44 pagesPLC Unit 2-1 PDFMahesh ShendeNo ratings yet
- Industrial Electric RelayDocument26 pagesIndustrial Electric Relaysyed muazzam shah putraNo ratings yet
- 309 Mechatronics MCQDocument27 pages309 Mechatronics MCQMr.G.Chandrasekar mechanicalstaffNo ratings yet
- Adc and Dac CNV ErrorsDocument26 pagesAdc and Dac CNV ErrorsAnonymous TPVfFif6TO100% (2)
- DC Motor Speed ControlDocument24 pagesDC Motor Speed ControlSumu Talal50% (2)
- Control System Components (ICE 3015): Zeroing SynchrosDocument18 pagesControl System Components (ICE 3015): Zeroing SynchrosmeenasundarNo ratings yet
- Programmable Logic Circuit PLCDocument79 pagesProgrammable Logic Circuit PLCRahul100% (7)
- ME 1305 - Applied Hydraulics and PneumaticsDocument7 pagesME 1305 - Applied Hydraulics and PneumaticsUva ShruthikaNo ratings yet
- Introduction to Mechatronics SystemsDocument86 pagesIntroduction to Mechatronics SystemsSt. Anne's CET (EEE Department)No ratings yet
- CH 1 Intro 2 InstrumentationDocument22 pagesCH 1 Intro 2 InstrumentationNorkarlina Binti Khairul AriffinNo ratings yet
- Basic Motor Control GuideDocument17 pagesBasic Motor Control GuideHeizen BulanNo ratings yet
- Unit 1-MECHATRONICS, SENSORS AND TRANSDUCERSDocument55 pagesUnit 1-MECHATRONICS, SENSORS AND TRANSDUCERSRamanathanDurai100% (3)
- Question Bank of Industrial Automation RevDocument1 pageQuestion Bank of Industrial Automation RevPatel NeelNo ratings yet
- Me2401 Mechatronics - 2 Marks With Answer PDFDocument15 pagesMe2401 Mechatronics - 2 Marks With Answer PDFSiva RamanNo ratings yet
- Electro-Pneumatics Control FundamentalsDocument40 pagesElectro-Pneumatics Control Fundamentalssultan1786No ratings yet
- Fundamentals of Electrical and Electronics Engineering Measuring InstrumentsDocument36 pagesFundamentals of Electrical and Electronics Engineering Measuring InstrumentsGurram Jithin100% (1)
- Electro-Pneumatics: Understanding Pneumatic and Electro-Pneumatic Elements for Automation ControlDocument30 pagesElectro-Pneumatics: Understanding Pneumatic and Electro-Pneumatic Elements for Automation ControlPrakash KumarNo ratings yet
- Introduction To Sensors in MechatronicsDocument20 pagesIntroduction To Sensors in MechatronicsRadhaMadhavNo ratings yet
- Electro-Pneumatics: Module EP-5: Sensors in Electro-Pneumatics (Proximity Switches and Pressure Switches)Document36 pagesElectro-Pneumatics: Module EP-5: Sensors in Electro-Pneumatics (Proximity Switches and Pressure Switches)Joesun LizardoNo ratings yet
- Unit 4& 5Document9 pagesUnit 4& 5hariharanbook0% (1)
- 45 - 60055 - EE512 - 2015 - 5 - 2 - 1 - Experiment 2 PLC PDFDocument7 pages45 - 60055 - EE512 - 2015 - 5 - 2 - 1 - Experiment 2 PLC PDFkrishnandrkNo ratings yet
- Differential amplifier explainedDocument7 pagesDifferential amplifier explainedTanvir Ahmed MunnaNo ratings yet
- Linear Quadratic RegulatorDocument4 pagesLinear Quadratic RegulatorFlorian PjetriNo ratings yet
- Control SystemDocument55 pagesControl SystemEr Rajdeep SahaNo ratings yet
- FeedCon (Unit 1)Document10 pagesFeedCon (Unit 1)Melissa LindayagNo ratings yet
- Classical Vs Intelligent ControlDocument13 pagesClassical Vs Intelligent ControlNavin DasNo ratings yet
- PNP NPN SensorsDocument9 pagesPNP NPN Sensorsraj kharatNo ratings yet
- Transducer: TypesDocument39 pagesTransducer: Typestujuh belasNo ratings yet
- Introduction To Control SystemDocument47 pagesIntroduction To Control SystemDlan Dela CruzNo ratings yet
- Mechatronics Systems Principles and Fault FindingDocument11 pagesMechatronics Systems Principles and Fault Findingshafra100% (1)
- Automatic Conveyor For Industrial AutomationDocument3 pagesAutomatic Conveyor For Industrial AutomationSoni BhattaNo ratings yet
- Electrohydraulic Proportional Controls GuideDocument5 pagesElectrohydraulic Proportional Controls GuidehaggNo ratings yet
- Electric Drives - Motor Controllers and Control SystemsDocument11 pagesElectric Drives - Motor Controllers and Control SystemsRam KumarNo ratings yet
- Direct Active Shift Control for Automatic TransmissionsDocument7 pagesDirect Active Shift Control for Automatic TransmissionsVlad SibiceanuNo ratings yet
- Servomechanism Presentation MCS - 1Document19 pagesServomechanism Presentation MCS - 1HKD89100% (3)
- CONTROL SYSTEMS ENGINEERING: INTRODUCTIONDocument99 pagesCONTROL SYSTEMS ENGINEERING: INTRODUCTIONBASIL BENNY100% (1)
- Technical AnalysisDocument69 pagesTechnical AnalysisMRINMOY KARMAKAR100% (1)
- How to Initialize and Use the COPRO OS9 TCP/IP BoardDocument4 pagesHow to Initialize and Use the COPRO OS9 TCP/IP BoardPrakash KumarNo ratings yet
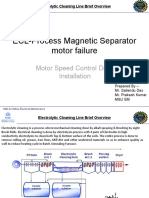
- Electrolytic Cleaning Line Motor Control Drive InstallationDocument7 pagesElectrolytic Cleaning Line Motor Control Drive InstallationPrakash KumarNo ratings yet
- How To Download CoprocessorDocument2 pagesHow To Download CoprocessorPrakash KumarNo ratings yet
- Padmasambhava Heap of Precious JewelsDocument31 pagesPadmasambhava Heap of Precious JewelsKathodhra100% (1)
- Candlestick Patterns Trading GuideDocument19 pagesCandlestick Patterns Trading GuideleylNo ratings yet
- Candlestick Patterns Every Trader Should KnowDocument65 pagesCandlestick Patterns Every Trader Should KnowDxtr V Drn100% (1)
- TeachingsOfLordKapila PDFDocument333 pagesTeachingsOfLordKapila PDFalok_sycogony1No ratings yet
- Candlestick Patterns Trading GuideDocument19 pagesCandlestick Patterns Trading GuideleylNo ratings yet
- TrollyDocument1 pageTrollyPrakash KumarNo ratings yet
- Reactions Under Anodic and Cathodic PolarizationDocument4 pagesReactions Under Anodic and Cathodic PolarizationPrakash KumarNo ratings yet
- What Is The Automatio N Pyramid?Document11 pagesWhat Is The Automatio N Pyramid?Prakash KumarNo ratings yet
- Fiber Optics Cable Maintenance: Study Material OnDocument54 pagesFiber Optics Cable Maintenance: Study Material OnPrakash KumarNo ratings yet
- BAF - SOP - 04 Maintenance of Emerson UPSDocument12 pagesBAF - SOP - 04 Maintenance of Emerson UPSPrakash KumarNo ratings yet
- SCL Cheat SheetDocument2 pagesSCL Cheat SheetboegschroefNo ratings yet
- Power TransformerDocument55 pagesPower TransformerPrakash KumarNo ratings yet
- Monitor drive faults and statuses with the Faults windowDocument14 pagesMonitor drive faults and statuses with the Faults windowPrakash KumarNo ratings yet
- Power Cutting Tracking FormDocument1 pagePower Cutting Tracking FormPrakash KumarNo ratings yet
- Standard Operating ProceduresDocument4 pagesStandard Operating ProceduresPrakash KumarNo ratings yet
- 8376 Electronic Component CleanerDocument3 pages8376 Electronic Component CleanerPrakash Kumar100% (1)
- # 6030 PEN OIL: Grade: Industrial Grade Heavy Duty Penetrating OilDocument3 pages# 6030 PEN OIL: Grade: Industrial Grade Heavy Duty Penetrating OilPrakash KumarNo ratings yet
- FR-E700 Instruction Manual (Basic) InverterDocument68 pagesFR-E700 Instruction Manual (Basic) InverterJibon GameNo ratings yet
- Valid Standard: Approved Vendor List For Electrical and ElectronicsDocument12 pagesValid Standard: Approved Vendor List For Electrical and ElectronicsPrakash KumarNo ratings yet
- COP Access ControlDocument7 pagesCOP Access ControlPrakash KumarNo ratings yet
- Standard Operating Procedures: XX of XXDocument1 pageStandard Operating Procedures: XX of XXPrakash KumarNo ratings yet
- Safety Shower Eye WashDocument10 pagesSafety Shower Eye WashPrakash Kumar100% (1)
- SS - ENGG10 - Rev2 - Manual Pendant Operated Electric HoistsDocument8 pagesSS - ENGG10 - Rev2 - Manual Pendant Operated Electric HoistsPrakash KumarNo ratings yet
- Hydrogen Gas SafetyDocument1 pageHydrogen Gas SafetyPrakash KumarNo ratings yet
- Daily Management Quiz: 2007: SN Question Option A Option B Option C Option D AnswerDocument5 pagesDaily Management Quiz: 2007: SN Question Option A Option B Option C Option D AnswerPrakash Kumar50% (2)
- Daily Management Quiz: 2007: SN Question Option A Option B Option C Option D AnswerDocument5 pagesDaily Management Quiz: 2007: SN Question Option A Option B Option C Option D AnswerPrakash Kumar50% (2)
- Design of Machine Elements ME 452Document2 pagesDesign of Machine Elements ME 452Moiz SubhanNo ratings yet
- ANSI Relay Symbols GuideDocument2 pagesANSI Relay Symbols Guiderupash_82No ratings yet
- Location ComponentDocument12 pagesLocation ComponentpricopdanielNo ratings yet
- MNE 3046 Part 1Document68 pagesMNE 3046 Part 1ChunMan SitNo ratings yet
- Advanced Mechanical Design: Submitted ToDocument3 pagesAdvanced Mechanical Design: Submitted ToUmair HaroonNo ratings yet
- 35 Different Types of Engineering DegreesDocument14 pages35 Different Types of Engineering DegreesLiannKwonNo ratings yet
- Vibrations of Shells and PlatesDocument586 pagesVibrations of Shells and PlatesAres ZhaoNo ratings yet
- Footwear Machinery Part IIDocument13 pagesFootwear Machinery Part IIsanjana sadhukhanNo ratings yet
- G133-05 Standard Test Method For Linearly Reciprocating Ball-On-Flat Sliding WearDocument9 pagesG133-05 Standard Test Method For Linearly Reciprocating Ball-On-Flat Sliding WearKARLA100% (1)
- admin,+JMMET V8A4 KrishnanDocument6 pagesadmin,+JMMET V8A4 KrishnanManicks VelanNo ratings yet
- Rotor Balancing Simulator: Fourth Year Graduation ProjectDocument21 pagesRotor Balancing Simulator: Fourth Year Graduation ProjectMahmoud SamirNo ratings yet
- Sree Resume 25.7.18Document3 pagesSree Resume 25.7.18Anoop VANo ratings yet
- BTAU Time Table Winter 2022Document5 pagesBTAU Time Table Winter 2022Shailesh ShitoleNo ratings yet
- Cam and FollowerDocument17 pagesCam and Followerniaz kilamNo ratings yet
- Sabp G 023Document13 pagesSabp G 023Krishnamoorthy100% (1)
- Control and Interfacing of Motors With Ni-Labview Using Ni-MyrioDocument5 pagesControl and Interfacing of Motors With Ni-Labview Using Ni-MyrioMuhammad Rizky KaisupyNo ratings yet
- Apple 17Document20 pagesApple 17Choo Wei shengNo ratings yet
- LEC 1 - COMP-212-Introduction-to-ComputersDocument23 pagesLEC 1 - COMP-212-Introduction-to-ComputersMarifher Kate Dela CruzNo ratings yet
- Air CompressorsDocument26 pagesAir Compressorskabbilaash kumarNo ratings yet
- Timetables For M.Tech III Sem RegularDocument7 pagesTimetables For M.Tech III Sem RegularSathya ReddyNo ratings yet
- Design and Simulation of A Prosthetic Mechanical HandDocument4 pagesDesign and Simulation of A Prosthetic Mechanical HandLufti Nurhartanto SmansapatiNo ratings yet
- Project Controller Unit Indradrive enDocument176 pagesProject Controller Unit Indradrive enCristhian GraefNo ratings yet
- BHEL-Technical Enquiry SpecsDocument46 pagesBHEL-Technical Enquiry Specsanishgirme0% (1)
- Marchisi Monobloc ManualDocument59 pagesMarchisi Monobloc ManualDan BrookfieldNo ratings yet
- Ahlmann Al65-75-95Document138 pagesAhlmann Al65-75-95Bakas AthanasiosNo ratings yet
- MACAPPB Standard System Components. Continuous Vibration, PDFDocument21 pagesMACAPPB Standard System Components. Continuous Vibration, PDFmika cabelloNo ratings yet
- Sensitive SkinDocument12 pagesSensitive SkinBhavik Chaudhari100% (3)
- Kuhn Archimedean ScrewsDocument2 pagesKuhn Archimedean ScrewsitovarsilvaNo ratings yet
- Pc100-5 Custom Operational ManualDocument53 pagesPc100-5 Custom Operational ManualPHÁT NGUYỄN THẾNo ratings yet
- BG825 Om 27 02 15Document158 pagesBG825 Om 27 02 15Anonymous OCxICC0ub3100% (1)