You might also like
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- OBD-InsightsDocument52 pagesOBD-Insightsjayasundar100% (1)
- Introduction to the simulation of power plants for EBSILON®Professional Version 15From EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15No ratings yet
- 2.5l Cec SystemDocument37 pages2.5l Cec Systemdaniel lacerdaNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- ATPL Inst 8.3 PDFDocument4 pagesATPL Inst 8.3 PDFKoustubh VadalkarNo ratings yet
- Power Plant InstrumentsDocument4 pagesPower Plant InstrumentssseshaNo ratings yet
- 3 934584 28 4Document3 pages3 934584 28 4Joan LuijkxNo ratings yet
- AssignmentDocument5 pagesAssignmentSai DivakarNo ratings yet
- Bosch Motronic ME7.9.10Document32 pagesBosch Motronic ME7.9.10paulyvon.dicuNo ratings yet
- Fuel Injection System Bosch AfcDocument28 pagesFuel Injection System Bosch AfcShivam TandonNo ratings yet
- MPFI System ExplainedDocument15 pagesMPFI System Explainedಶಿವರಾಜ್ ಎನ್No ratings yet
- Turbine Engine Fuel System: Basic Maintenance Training Manual Module 14 PropulsionDocument10 pagesTurbine Engine Fuel System: Basic Maintenance Training Manual Module 14 PropulsionccoyureNo ratings yet
- Basic Overview of Electronic Fuel InjectionDocument23 pagesBasic Overview of Electronic Fuel InjectionAndhieAbrahamNo ratings yet
- 14cux Fuel InjectionDocument80 pages14cux Fuel InjectionJuanjo Chamizo Naranjo100% (1)
- Report-Multi Point Fuel Injection-MpfiDocument19 pagesReport-Multi Point Fuel Injection-MpfiHemant PatraNo ratings yet
- DENSO SystemsDocument34 pagesDENSO Systemsthailan100% (3)
- Diesel Engine ManagementDocument56 pagesDiesel Engine Managementbravo6dNo ratings yet
- Multi-Point Electronic Fuel Injection Systems ExplainedDocument7 pagesMulti-Point Electronic Fuel Injection Systems ExplainedAswin PrasannanNo ratings yet
- Unit 1 Automotive SubsystemsDocument36 pagesUnit 1 Automotive SubsystemsArulmuruganNo ratings yet
- ME-Motronic System Controls Cylinder Charge and Fuel DeliveryDocument12 pagesME-Motronic System Controls Cylinder Charge and Fuel DeliveryKanagasundram JathursajanNo ratings yet
- Engine and Transmission Systems ExplainedDocument36 pagesEngine and Transmission Systems ExplainedArulmuruganNo ratings yet
- Lect 1-Efi Petrol 3HRSDocument50 pagesLect 1-Efi Petrol 3HRSHodge LorneNo ratings yet
- Exposicion Inyeccion ElectronicaDocument56 pagesExposicion Inyeccion ElectronicaPedro Emanuel Pineda PinedaNo ratings yet
- Sensors and ActuatorsDocument25 pagesSensors and Actuatorsyk_maddy100% (4)
- FF EcuDocument9 pagesFF EcuEduardo J CondeNo ratings yet
- Unit 4-AEEDocument92 pagesUnit 4-AEEMrs G Hemalatha PSG-PTCNo ratings yet
- Multi Port Fuel Injection SystemDocument4 pagesMulti Port Fuel Injection SystemVarsha SreekumarNo ratings yet
- Chapter 4 - Turbine Engine Operation, Intstruments, Maintenance, and OverhaulDocument67 pagesChapter 4 - Turbine Engine Operation, Intstruments, Maintenance, and OverhaulKim RioverosNo ratings yet
- Literature Review Engine SensorsDocument5 pagesLiterature Review Engine SensorsMuhamad Khairolnain Bin GhazaliNo ratings yet
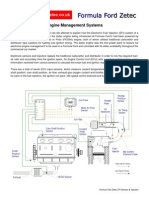
- Formula Ford Zetec EFI Sensors & Injectors ExplainedDocument9 pagesFormula Ford Zetec EFI Sensors & Injectors ExplainedDilanWijerathnaNo ratings yet
- Em MissionsDocument3 pagesEm Missionsภูเก็ต เป็นเกาะNo ratings yet
- AE U-3 HalfDocument9 pagesAE U-3 HalfPurna SapkotaNo ratings yet
- Weber Injection-Ignition SystemDocument27 pagesWeber Injection-Ignition SystemjohnvandurenNo ratings yet
- Panda Injection DescriptionDocument20 pagesPanda Injection DescriptionmvrhtNo ratings yet
- Turbine IndicationDocument45 pagesTurbine IndicationSThaneasMurNo ratings yet
- Fuel Injection SystemDocument9 pagesFuel Injection SystemJM PraveenNo ratings yet
- Crankshaft, Camshaft, Coolant, Exhaust Gas, MAP, MAF and Oxygen Sensors ExplainedDocument28 pagesCrankshaft, Camshaft, Coolant, Exhaust Gas, MAP, MAF and Oxygen Sensors ExplainedAyush Banerjee100% (1)
- Isuzu EngineDocument53 pagesIsuzu EngineSmaileRun78% (18)
- 4.0L Cec System: 1988 Jeep CherokeeDocument17 pages4.0L Cec System: 1988 Jeep CherokeefredericdiNo ratings yet
- 4.1 Engine Management System-R1-1 MINYI EFFADocument24 pages4.1 Engine Management System-R1-1 MINYI EFFARusonegroNo ratings yet
- Automotive ElectronicsDocument44 pagesAutomotive ElectronicsRohit Kumar100% (1)
- 4-Cylinder Engine EMS ExplainedDocument27 pages4-Cylinder Engine EMS ExplainedGabriel BalcazarNo ratings yet
- BOSCH Fuel Supply System MEV 17.4 Technical DescriptionDocument4 pagesBOSCH Fuel Supply System MEV 17.4 Technical DescriptionRui MendesNo ratings yet
- Basic GoverningDocument24 pagesBasic GoverningMohamed RashidNo ratings yet
- MPFI System: How It Works and Its ComponentsDocument6 pagesMPFI System: How It Works and Its Componentsalan kurniawanNo ratings yet
- Electronic Engine ControlDocument40 pagesElectronic Engine Controlvasthav27No ratings yet
- MPFI Vs Carburetor Technology For Multi Cylinder EnginesDocument14 pagesMPFI Vs Carburetor Technology For Multi Cylinder EnginesDipak Kumar100% (1)
- 966 Fuel SystemDocument12 pages966 Fuel SystemWalid HouranNo ratings yet
- GDIDocument7 pagesGDIlinhda561No ratings yet
- ElectronicsDocument4 pagesElectronicsMarcusNo ratings yet
- Fuel InjectionDocument4 pagesFuel InjectionWeyih ReganNo ratings yet
- Application - Mech Engg - 1 - Automotive Applications PPT - Case Study 2 FinalDocument88 pagesApplication - Mech Engg - 1 - Automotive Applications PPT - Case Study 2 Finalrohinigulhane604No ratings yet
- ECU Controls Engine FunctionsDocument1 pageECU Controls Engine FunctionsemmanueljosephNo ratings yet
- Electronic Engine ManagementDocument27 pagesElectronic Engine Managementmkandan_263058No ratings yet
- E - Theory/Operation - Efi: 1991 Mitsubishi MonteroDocument7 pagesE - Theory/Operation - Efi: 1991 Mitsubishi MonteroAnimemanuel MuñozNo ratings yet
- ECU Presentation: Controlling the Modern AutomobileDocument19 pagesECU Presentation: Controlling the Modern Automobilesahil k mehta100% (2)
- Automotive Sensors & ActuatorsDocument108 pagesAutomotive Sensors & ActuatorsSatyaAditham90% (10)
- Airflow Meters Measure The Amount of Air Going Into The Engine This Is Used by The Ecu To Control The Amount of Fuel Used by The EngineDocument30 pagesAirflow Meters Measure The Amount of Air Going Into The Engine This Is Used by The Ecu To Control The Amount of Fuel Used by The EngineJohn Gary WalfordNo ratings yet
- ECU and Engine Management System GuideDocument10 pagesECU and Engine Management System GuideRailyn Tagwalan Timol100% (1)
- Mail Id: Srinivas - Kadali@vnrvjiet - inDocument11 pagesMail Id: Srinivas - Kadali@vnrvjiet - inMd zakirNo ratings yet
- 074 DraindesignaspublishedDocument6 pages074 DraindesignaspublishedMd zakirNo ratings yet
- SSC Conv Civil 50Document42 pagesSSC Conv Civil 50Md zakirNo ratings yet
- Behaviour of Different Nanomaterials in Geopolymer Concrete: M. Manoj Kumar, S. YuvarajDocument7 pagesBehaviour of Different Nanomaterials in Geopolymer Concrete: M. Manoj Kumar, S. YuvarajMd zakirNo ratings yet
- RRB JE SyllabusDocument11 pagesRRB JE SyllabusMd zakirNo ratings yet
- Wastewater Sampling306 Af.r4Document24 pagesWastewater Sampling306 Af.r4Hector CardenasNo ratings yet
- Notice DEP 01 Post 07 10 2021Document1 pageNotice DEP 01 Post 07 10 2021Md zakirNo ratings yet
- Notice DEP 01 Post 07 10 2021Document1 pageNotice DEP 01 Post 07 10 2021Md zakirNo ratings yet
- Notice DEP 01 Post 07 10 2021Document1 pageNotice DEP 01 Post 07 10 2021Md zakirNo ratings yet
- B.Tech. III Year I Semester Regular Examinations, Nov/Dec, 2017Document1 pageB.Tech. III Year I Semester Regular Examinations, Nov/Dec, 2017Md zakirNo ratings yet
- UNIT-2 Introduction To Intelligent Vehicles: Criteria For The Identification of Safety and Efficiency ImpactDocument11 pagesUNIT-2 Introduction To Intelligent Vehicles: Criteria For The Identification of Safety and Efficiency ImpactMd zakirNo ratings yet
- EFI System ExplainedDocument14 pagesEFI System ExplainedMd zakirNo ratings yet
- Syllabus For Water Supply EngineeringDocument2 pagesSyllabus For Water Supply EngineeringMd zakirNo ratings yet
- PDEACA OkDocument2 pagesPDEACA Okvemuri pavithraNo ratings yet
- Kani's Method Frame AnalysisDocument18 pagesKani's Method Frame AnalysisHimaTeja48100% (3)
- Types of Landslides: Ministry of Lands AND Mineral ResourcesDocument2 pagesTypes of Landslides: Ministry of Lands AND Mineral ResourcesLanz Annnton.No ratings yet
- B.Tech. III Year I Semester Regular / Supplementary Examinations, Nov/Dec, 2019Document3 pagesB.Tech. III Year I Semester Regular / Supplementary Examinations, Nov/Dec, 2019Md zakirNo ratings yet
- List Suggested Books Indian Authors Publishers PDFDocument52 pagesList Suggested Books Indian Authors Publishers PDFAbhinav GargNo ratings yet
- B.Tech. II Year II Semester Regular Examinations, May, 2017: Subject Code 5CE08Document2 pagesB.Tech. II Year II Semester Regular Examinations, May, 2017: Subject Code 5CE08Md zakirNo ratings yet
- C Wï Ù Ò$Yìlä Æ$ : Sîæg Üï Gïüþ (Výs Þ Òü ÇùìœæDocument12 pagesC Wï Ù Ò$Yìlä Æ$ : Sîæg Üï Gïüþ (Výs Þ Òü ÇùìœæMd zakirNo ratings yet
- Concrete TechnologyDocument24 pagesConcrete TechnologyPrantik Adhar SamantaNo ratings yet
- Chapter 15 PDFDocument16 pagesChapter 15 PDFMd zakirNo ratings yet
- 9607 Syllabus Media StudiesDocument28 pages9607 Syllabus Media StudiesmisterNo ratings yet
- Welder Training in SMAW, GTAW & GMAW Welding Engineering & NDT Consultancy Welding Engineering Related TrainingDocument4 pagesWelder Training in SMAW, GTAW & GMAW Welding Engineering & NDT Consultancy Welding Engineering Related TrainingKavin PrakashNo ratings yet
- Agricrop9 ModuleDocument22 pagesAgricrop9 ModuleMaria Daisy ReyesNo ratings yet
- Cover Letter and Resume for Electrical Engineer PositionDocument4 pagesCover Letter and Resume for Electrical Engineer Positiongrabani77No ratings yet
- Uop Teuop-Tech-And-More-Air-Separation-Adsorbents-Articlech and More Air Separation Adsorbents ArticleDocument8 pagesUop Teuop-Tech-And-More-Air-Separation-Adsorbents-Articlech and More Air Separation Adsorbents ArticleRoo FaNo ratings yet
- jrc122457 Dts Survey Deliverable Ver. 5.0-3Document46 pagesjrc122457 Dts Survey Deliverable Ver. 5.0-3Boris Van CyrulnikNo ratings yet
- Oven Nordson ElectronicDocument60 pagesOven Nordson ElectronicDanijela KoNo ratings yet
- Ficha de Seguridad Dispositivo Pruba Doble Recamara 2875 - 2876Document133 pagesFicha de Seguridad Dispositivo Pruba Doble Recamara 2875 - 2876janetth rubianoNo ratings yet
- Relay: Chapter 1: What Is A Relay?Document19 pagesRelay: Chapter 1: What Is A Relay?Jason SonidoNo ratings yet
- Chapter-10 - Biomechanics in Sports Class 12Document29 pagesChapter-10 - Biomechanics in Sports Class 12Matrix craft4100% (1)
- Analyzing an Anti-Smoking Poster Using a Formalist ApproachDocument20 pagesAnalyzing an Anti-Smoking Poster Using a Formalist ApproachAlphred Jann NaparanNo ratings yet
- Sheet 5 SolvedDocument4 pagesSheet 5 Solvedshimaa eldakhakhnyNo ratings yet
- Cooler Catalogue PDFDocument12 pagesCooler Catalogue PDFCărunta-Crista CristinaNo ratings yet
- Impact of Microfinance On Women's Empowerment: A Case Study On Two Microfinance Institutions in Sri LankaDocument11 pagesImpact of Microfinance On Women's Empowerment: A Case Study On Two Microfinance Institutions in Sri Lankamandala jyoshnaNo ratings yet
- Very Basic GSADocument46 pagesVery Basic GSATim ChongNo ratings yet
- Six Sigma Statistical Methods Using Minitab 13 Manual4754Document95 pagesSix Sigma Statistical Methods Using Minitab 13 Manual4754vinaytoshchoudharyNo ratings yet
- 3 6 17weekly Homework Sheet Week 23 - 5th Grade - CcssDocument3 pages3 6 17weekly Homework Sheet Week 23 - 5th Grade - Ccssapi-328344919No ratings yet
- A Is Called The Base and N Is Called The Exponent: Grade 7 Math Lesson 21: Laws of Exponents Learning GuideDocument4 pagesA Is Called The Base and N Is Called The Exponent: Grade 7 Math Lesson 21: Laws of Exponents Learning GuideKez MaxNo ratings yet
- Skills For A High Performing Civil Service PDFDocument140 pagesSkills For A High Performing Civil Service PDFSam ONiNo ratings yet
- Tda7266 PDFDocument9 pagesTda7266 PDFRenato HernandezNo ratings yet
- The Effect of Electronic Word of Mouth On Sales A Meta-Analytic Review of Platform Product and Metric FactorsDocument52 pagesThe Effect of Electronic Word of Mouth On Sales A Meta-Analytic Review of Platform Product and Metric FactorsHoda El HALABINo ratings yet
- Iloc and Loc Uses PDFDocument16 pagesIloc and Loc Uses PDFsaurabhNo ratings yet
- Circuit Breaker GTSDocument31 pagesCircuit Breaker GTScpandey01_688066930No ratings yet
- Hve r13Document1 pageHve r13aleem_201sNo ratings yet
- QP 7721-Sobha-B+g+8-2town-Pahse IiDocument2 pagesQP 7721-Sobha-B+g+8-2town-Pahse IirajatNo ratings yet
- Acdsee Pro 6 End User License AgreementDocument7 pagesAcdsee Pro 6 End User License AgreementJonathon MoranNo ratings yet
- Foundation Fieldbus: Dataguard™ - Iec61158-2 - Isa/Sp50 - Type A - Extended TemperatureDocument1 pageFoundation Fieldbus: Dataguard™ - Iec61158-2 - Isa/Sp50 - Type A - Extended TemperatureJosé CallisayaNo ratings yet
- Writing Visual Basic ProjectsDocument1 pageWriting Visual Basic ProjectsAmmuKuttyNo ratings yet
- Iso 19108Document56 pagesIso 19108AzzahraNo ratings yet
- User Manual: Smart Alarm System & AppDocument41 pagesUser Manual: Smart Alarm System & AppEduardo Jose Fernandez PedrozaNo ratings yet
- A Poison Like No Other: How Microplastics Corrupted Our Planet and Our BodiesFrom EverandA Poison Like No Other: How Microplastics Corrupted Our Planet and Our BodiesRating: 5 out of 5 stars5/5 (1)
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemFrom EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNo ratings yet
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsFrom EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNo ratings yet
- Introduction to Petroleum Process SafetyFrom EverandIntroduction to Petroleum Process SafetyRating: 3 out of 5 stars3/5 (2)
- Incidents That Define Process SafetyFrom EverandIncidents That Define Process SafetyNo ratings yet
- Guidelines for Auditing Process Safety Management SystemsFrom EverandGuidelines for Auditing Process Safety Management SystemsNo ratings yet
- Nutritional and Therapeutic Interventions for Diabetes and Metabolic SyndromeFrom EverandNutritional and Therapeutic Interventions for Diabetes and Metabolic SyndromeNo ratings yet
- A Complete Guide to Safety Officer Interview Questions and AnswersFrom EverandA Complete Guide to Safety Officer Interview Questions and AnswersRating: 4 out of 5 stars4/5 (1)
- 3D Printing of Concrete: State of the Art and Challenges of the Digital Construction RevolutionFrom Everand3D Printing of Concrete: State of the Art and Challenges of the Digital Construction RevolutionArnaud PerrotNo ratings yet
- Trevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationFrom EverandTrevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationNo ratings yet
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisFrom EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisRating: 5 out of 5 stars5/5 (1)
- Practical Industrial Safety, Risk Assessment and Shutdown SystemsFrom EverandPractical Industrial Safety, Risk Assessment and Shutdown SystemsRating: 4 out of 5 stars4/5 (11)
- Rules of Thumb for Maintenance and Reliability EngineersFrom EverandRules of Thumb for Maintenance and Reliability EngineersRating: 4.5 out of 5 stars4.5/5 (12)
- Safety Fundamentals and Best Practices in Construction IndustryFrom EverandSafety Fundamentals and Best Practices in Construction IndustryNo ratings yet
- Radium Girls: Women and Industrial Health Reform, 1910-1935From EverandRadium Girls: Women and Industrial Health Reform, 1910-1935Rating: 4.5 out of 5 stars4.5/5 (4)
- Guidelines for Implementing Process Safety ManagementFrom EverandGuidelines for Implementing Process Safety ManagementNo ratings yet
- Autophagy in Health and DiseaseFrom EverandAutophagy in Health and DiseaseBeverly RothermelNo ratings yet
- Safety Critical Systems Handbook: A Straight forward Guide to Functional Safety, IEC 61508 (2010 EDITION) and Related Standards, Including Process IEC 61511 and Machinery IEC 62061 and ISO 13849From EverandSafety Critical Systems Handbook: A Straight forward Guide to Functional Safety, IEC 61508 (2010 EDITION) and Related Standards, Including Process IEC 61511 and Machinery IEC 62061 and ISO 13849Rating: 4 out of 5 stars4/5 (5)
- Safety and Intelligent Transport Systems Development in the People’s Republic of ChinaFrom EverandSafety and Intelligent Transport Systems Development in the People’s Republic of ChinaNo ratings yet
- One Health: Integrated Approach to 21st Century Challenges to HealthFrom EverandOne Health: Integrated Approach to 21st Century Challenges to HealthJoana C. PrataNo ratings yet
- The Invisible Rainbow: A History of Electricity and LifeFrom EverandThe Invisible Rainbow: A History of Electricity and LifeRating: 4.5 out of 5 stars4.5/5 (21)
- Exercise, Sport, and Bioanalytical Chemistry: Principles and PracticeFrom EverandExercise, Sport, and Bioanalytical Chemistry: Principles and PracticeNo ratings yet
- Fire Protection Engineering in Building DesignFrom EverandFire Protection Engineering in Building DesignRating: 4.5 out of 5 stars4.5/5 (5)
- The Construction Safety Guide: Injury and Illness Prevention through DesignFrom EverandThe Construction Safety Guide: Injury and Illness Prevention through DesignRating: 4 out of 5 stars4/5 (6)