You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fluent-Adv-rm 14.5 L04 SRF2Document81 pagesFluent-Adv-rm 14.5 L04 SRF2Mohamed SelwenNo ratings yet
- CoiledTubing WEBDocument5 pagesCoiledTubing WEBMostafa KorttamNo ratings yet
- Breathing ArchitectureDocument19 pagesBreathing ArchitectureAbdul Wajid0% (1)
- Mason - Applied Computational Aerodynamics PDFDocument450 pagesMason - Applied Computational Aerodynamics PDFDiana DumitrascuNo ratings yet
- Coiled TubingDocument31 pagesCoiled TubingMostafa KorttamNo ratings yet
- MEPO-PETREL Integration - ASHDocument28 pagesMEPO-PETREL Integration - ASHMostafa KorttamNo ratings yet
- Vehicle Aerodynamics PresentationDocument66 pagesVehicle Aerodynamics PresentationAnonymous ktcvLFJRyNo ratings yet
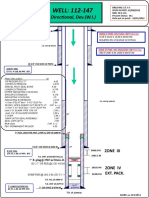
- WELL: 112-147: Directional, Dev. (W.I.)Document15 pagesWELL: 112-147: Directional, Dev. (W.I.)Mostafa KorttamNo ratings yet
- Load Analysis of Trestle Leg Conveyor Support Structures Buried in StockpilesDocument7 pagesLoad Analysis of Trestle Leg Conveyor Support Structures Buried in StockpilesJakesNo ratings yet
- Enhanced Oil RecoveryDocument2 pagesEnhanced Oil RecoveryMostafa KorttamNo ratings yet
- EOG Resources Reports Excellent Fourth Quarter and Full Year 2019 Results - DeGolyer & MacNaughton - World Wide Petroleum ConsultantsDocument51 pagesEOG Resources Reports Excellent Fourth Quarter and Full Year 2019 Results - DeGolyer & MacNaughton - World Wide Petroleum ConsultantsMostafa KorttamNo ratings yet
- Crude Oil And: UpstreamDocument44 pagesCrude Oil And: UpstreamMostafa KorttamNo ratings yet
- Effects of Fluid and Reservoir CharacterDocument13 pagesEffects of Fluid and Reservoir CharacterMostafa KorttamNo ratings yet
- Xplot For Water FloodingDocument3 pagesXplot For Water FloodingMostafa KorttamNo ratings yet
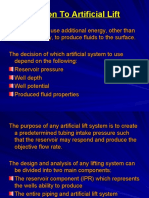
- Artificial Lift IntroductionDocument81 pagesArtificial Lift IntroductionMostafa KorttamNo ratings yet
- Qatar North Field GTL Project: ConfidentialDocument23 pagesQatar North Field GTL Project: ConfidentialMostafa KorttamNo ratings yet
- Subsea Well Control Techniques: Important Considerations AreDocument54 pagesSubsea Well Control Techniques: Important Considerations AreMostafa KorttamNo ratings yet
- Planned Ops - Overview On Actual Status - Lessons Learned and Way ForwardDocument15 pagesPlanned Ops - Overview On Actual Status - Lessons Learned and Way ForwardMostafa KorttamNo ratings yet
- Facies Interpretation From Well LogsDocument11 pagesFacies Interpretation From Well LogsMostafa KorttamNo ratings yet
- Acs Est 5b00826Document10 pagesAcs Est 5b00826Mostafa KorttamNo ratings yet
- Dakhelpour Ghoveifel2019 Article Capillary BasedMethodForRockTyDocument10 pagesDakhelpour Ghoveifel2019 Article Capillary BasedMethodForRockTyMostafa KorttamNo ratings yet
- Design of ESP: - "Unlike Positive-Displacement Pumps, ESP Does Not Displace ADocument14 pagesDesign of ESP: - "Unlike Positive-Displacement Pumps, ESP Does Not Displace AMostafa Korttam100% (1)
- Dips Image Deviated WellsDocument20 pagesDips Image Deviated WellsMostafa KorttamNo ratings yet
- Fu2018 Article ModelingAndSimulationOfTransitDocument18 pagesFu2018 Article ModelingAndSimulationOfTransitMostafa KorttamNo ratings yet
- Special Core Analysis Challenges, Pitfalls and Solutions: What's So "Special" About.Document32 pagesSpecial Core Analysis Challenges, Pitfalls and Solutions: What's So "Special" About.Mostafa KorttamNo ratings yet
- MICP - Typical Data On Small Samples: - Clay Destruction/texture AlterationDocument17 pagesMICP - Typical Data On Small Samples: - Clay Destruction/texture AlterationMostafa KorttamNo ratings yet
- 6201 0x0 46291EN ROCO Wave WebDocument36 pages6201 0x0 46291EN ROCO Wave Webandrei_iarcaNo ratings yet
- Kruger Tunnel Ventilation Products BrochureDocument12 pagesKruger Tunnel Ventilation Products BrochureMarino AyalaNo ratings yet
- Source, Dispersion and Combustion Modelling of An Accidental Release of Hydrogen in An Urban EnvironmentDocument25 pagesSource, Dispersion and Combustion Modelling of An Accidental Release of Hydrogen in An Urban EnvironmentKaliyan MajhiNo ratings yet
- Design and Evaluation of Geothermal Steam SeparatorsDocument6 pagesDesign and Evaluation of Geothermal Steam SeparatorsHÜSEYİN ALBAYRAKNo ratings yet
- Ansys Discovery Live: Real-Time Simulation RevolutionDocument4 pagesAnsys Discovery Live: Real-Time Simulation RevolutionVăn Tuấn Nguyễn0% (1)
- CFD WaterjetDocument8 pagesCFD WaterjettafocanNo ratings yet
- INCAST 2008-004: Viscous Flow Analysis in A Convergent-Divergent NozzleDocument4 pagesINCAST 2008-004: Viscous Flow Analysis in A Convergent-Divergent NozzleEur-Ing Nicola GalluzziNo ratings yet
- 2122 Mast M-Tech A2 Hoe Emship enDocument22 pages2122 Mast M-Tech A2 Hoe Emship enMohamed BoutmezoughetNo ratings yet
- Yang2013 PDFDocument12 pagesYang2013 PDFsiddharth GautamNo ratings yet
- Mould Description 2021Document44 pagesMould Description 2021Veluri HemanthNo ratings yet
- Design and Analysis of A Kaplan Turbine Runner WheelDocument16 pagesDesign and Analysis of A Kaplan Turbine Runner WheelMuhammadFikriNo ratings yet
- Guerrero Vela ETSIDocument11 pagesGuerrero Vela ETSIKarthik KrNo ratings yet
- Thesis Nomenclature ExampleDocument7 pagesThesis Nomenclature Examplegcqbyfdj100% (2)
- Propeller Acoustics Simulation 1678017865 PDFDocument22 pagesPropeller Acoustics Simulation 1678017865 PDFEtienneNo ratings yet
- Virtualwindtunnel EbookDocument78 pagesVirtualwindtunnel EbookEfrain Diaz Garcia100% (1)
- Digested - A Ghost-Cell Immersed Boundary Method......Document2 pagesDigested - A Ghost-Cell Immersed Boundary Method......Aiza AlbuferaNo ratings yet
- Effect of Applying Screen and Honeycomb To The FloDocument12 pagesEffect of Applying Screen and Honeycomb To The FlojuanNo ratings yet
- Assignment MANIFOLD FinalDocument17 pagesAssignment MANIFOLD FinalMohamed SaeedNo ratings yet
- The Flygt N-Technology Pump Series For Water and Wastewater: High Efficiency With Clog-Free PerformanceDocument16 pagesThe Flygt N-Technology Pump Series For Water and Wastewater: High Efficiency With Clog-Free PerformanceFredy EsparzaNo ratings yet
- AMS 20160303 ImlayFowlerDocument31 pagesAMS 20160303 ImlayFowlerPAWAN KUMARNo ratings yet
- Extrenal AerodynamicsDocument18 pagesExtrenal AerodynamicsLuis Rubio GómezNo ratings yet
- Resume Mrunal CFDDocument2 pagesResume Mrunal CFDMrunal KrishnanNo ratings yet
- Application of Modified K-Ȧ Model To Predicting Cavitating Flow in Centrifugal PumpDocument9 pagesApplication of Modified K-Ȧ Model To Predicting Cavitating Flow in Centrifugal PumpiOScar UltronNo ratings yet
- Curriculum Juan ManzaneroDocument3 pagesCurriculum Juan ManzaneroJuan Manzanero TorricoNo ratings yet
- Cover Letter - CFDDocument1 pageCover Letter - CFDMrunal KrishnanNo ratings yet