You might also like
- Thesis On Quasi Z Source InverterDocument5 pagesThesis On Quasi Z Source InverterFaith Brown100% (1)
- Impedance Modeling and Analysis of Grid-Connected Voltage-Source ConvertersDocument8 pagesImpedance Modeling and Analysis of Grid-Connected Voltage-Source ConvertersEdsonNo ratings yet
- 05 Passive & Active IslandingDocument10 pages05 Passive & Active Islandingjwsmith60No ratings yet
- Synchronous Condenser Allocation Improving SCRDocument5 pagesSynchronous Condenser Allocation Improving SCRSurajit BanerjeeNo ratings yet
- Coupling Capacitor Voltage Transformer LaboratoryDocument7 pagesCoupling Capacitor Voltage Transformer LaboratoryKervin VialesNo ratings yet
- Stability Analysis of High Power Factor Vienna Rectifier Based On Reduced Order Model in D-Q DomainDocument11 pagesStability Analysis of High Power Factor Vienna Rectifier Based On Reduced Order Model in D-Q DomainTuấn Nguyễn VănNo ratings yet
- Chaper 6 Dynamic Modeling: Presentation #2Document24 pagesChaper 6 Dynamic Modeling: Presentation #2Sabri BouloumaNo ratings yet
- On-Line Voltage Stability Index Based On The Voltage Equation of Transmission LinesDocument8 pagesOn-Line Voltage Stability Index Based On The Voltage Equation of Transmission LinesPauloNo ratings yet
- Electronics: Stability Analysis of Grid-Connected Photovoltaic Systems With Dynamic Phasor ModelDocument10 pagesElectronics: Stability Analysis of Grid-Connected Photovoltaic Systems With Dynamic Phasor ModelsalamNo ratings yet
- Fast Coordinated Control of Dfig Wind Turbine Generators For Low and High Voltage Ride ThroughDocument18 pagesFast Coordinated Control of Dfig Wind Turbine Generators For Low and High Voltage Ride ThroughAds SupportNo ratings yet
- Recreation of Voltage Fluctuation Using Basic Parameters Measured in The Power GridDocument9 pagesRecreation of Voltage Fluctuation Using Basic Parameters Measured in The Power GridPetruta OloguNo ratings yet
- Voltage Stability Assessment of Power System Network Using QV and PV Modal AnalysisDocument6 pagesVoltage Stability Assessment of Power System Network Using QV and PV Modal AnalysisRafael RoratoNo ratings yet
- Voltage Stability Assessment of Power System Network Using QV and PV Modal AnalysisDocument5 pagesVoltage Stability Assessment of Power System Network Using QV and PV Modal AnalysisHoàng Thuỳ LinhNo ratings yet
- Applied SciencesDocument14 pagesApplied SciencesNigyar MusayevaNo ratings yet
- IgbtDocument7 pagesIgbtelvergonzalez1No ratings yet
- Energies: Transient Studies in Large Offshore Wind Farms Employing Detailed Circuit Breaker RepresentationDocument18 pagesEnergies: Transient Studies in Large Offshore Wind Farms Employing Detailed Circuit Breaker RepresentationHeather CarterNo ratings yet
- Digital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonDocument10 pagesDigital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonKumar DhirajNo ratings yet
- Voltage StabilityDocument6 pagesVoltage StabilityKabir ChakrabortyNo ratings yet
- AmanDocument26 pagesAmanAkhilesh BarnwalNo ratings yet
- 07381774Document10 pages07381774Obed GarcíaNo ratings yet
- Parametros Estatisticos Energizaçao de LinhaDocument9 pagesParametros Estatisticos Energizaçao de Linhacastilho22No ratings yet
- APEC UploadDocument5 pagesAPEC UploadDulal MannaNo ratings yet
- Adjustable Proportional Hybrid SVPWM Strategy For Neutral-Point-Clamped Three-Level InvertersDocument9 pagesAdjustable Proportional Hybrid SVPWM Strategy For Neutral-Point-Clamped Three-Level InvertersKoukou AmkoukouNo ratings yet
- 2020 PSCC Ji HyunetalDocument10 pages2020 PSCC Ji Hyunetalmb140400134 Maryam Dilawar HussainNo ratings yet
- Load Modeling For Fault Location in Distribution Systems With Distributed GenerationDocument8 pagesLoad Modeling For Fault Location in Distribution Systems With Distributed Generationcastilho22No ratings yet
- A Novel Approach For Load FlowDocument7 pagesA Novel Approach For Load Flowsf111No ratings yet
- Exploration of Chaos and Bifurcations inDocument8 pagesExploration of Chaos and Bifurcations inChemkhi Mohamed AliNo ratings yet
- The Use of Voltage Stability Indices and Proposed Instability Prediction To Coordinate With Protection SystemsDocument6 pagesThe Use of Voltage Stability Indices and Proposed Instability Prediction To Coordinate With Protection SystemsNarvin Raj ChandraNo ratings yet
- Python GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Document6 pagesPython GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Tomás de AlmeidaNo ratings yet
- Reactive Power Sharing Study of An Islanded Microgrid in Digsilent PowerfactoryDocument6 pagesReactive Power Sharing Study of An Islanded Microgrid in Digsilent Powerfactoryali didebanNo ratings yet
- Annamalai PaperDocument9 pagesAnnamalai PaperPrabu BaskaranNo ratings yet
- Development of Three-Phase Unbalanced Power Flow Using PV and PQ Models For Distributed Generation and Study of The Impact of DG ModelsDocument7 pagesDevelopment of Three-Phase Unbalanced Power Flow Using PV and PQ Models For Distributed Generation and Study of The Impact of DG Modelssrinivasa rathnamNo ratings yet
- An Efficient Method For Determining Threshold Voltage, Series Resistance and Effective Geometry MOS TransistorsDocument8 pagesAn Efficient Method For Determining Threshold Voltage, Series Resistance and Effective Geometry MOS Transistorskurts010No ratings yet
- Influence of Large-Scale PV On Voltage Stability of Sub-Transmission SystemDocument14 pagesInfluence of Large-Scale PV On Voltage Stability of Sub-Transmission SystemokasinskiNo ratings yet
- Impedance-Source Networks For Electric Power Conversion Part I: A Topological ReviewDocument18 pagesImpedance-Source Networks For Electric Power Conversion Part I: A Topological ReviewRekhamtrNo ratings yet
- Improved Droop Control WithWashout FilterDocument18 pagesImproved Droop Control WithWashout Filterhafiz858No ratings yet
- Study On Impacts of Large-Scale Photovoltaic Power Station On Power Grid Voltage ProfileDocument5 pagesStudy On Impacts of Large-Scale Photovoltaic Power Station On Power Grid Voltage ProfileNguyen Van ToanNo ratings yet
- A New Grid-Connected PV System Based On Cascaded H-Bridge Quasi-Z Source InverterDocument6 pagesA New Grid-Connected PV System Based On Cascaded H-Bridge Quasi-Z Source Inverterdilan bro SLNo ratings yet
- B. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsDocument8 pagesB. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsFelix GamarraNo ratings yet
- Research Paper Antiwindup Strategy For PI-Type Speed ControllerDocument9 pagesResearch Paper Antiwindup Strategy For PI-Type Speed ControllerAnoushka SaraswatNo ratings yet
- Generalized Discontinuous DC-link Balancing Modulation Strategy For Three-Level InvertersDocument8 pagesGeneralized Discontinuous DC-link Balancing Modulation Strategy For Three-Level Invertersmeistehaft270No ratings yet
- Epe 2013111515302022Document5 pagesEpe 2013111515302022qais652002No ratings yet
- Inversor de Fuente de Corriente Trifásico de Una Etapa para Sistema Fotovoltaico Conectado A La RedDocument9 pagesInversor de Fuente de Corriente Trifásico de Una Etapa para Sistema Fotovoltaico Conectado A La RedeliasNo ratings yet
- Capacitor SwitchingDocument5 pagesCapacitor SwitchingbhuvanesbraveNo ratings yet
- Classification of Power Quality Events Using Wavelet Analysis and Probabilistic Neural NetworkDocument12 pagesClassification of Power Quality Events Using Wavelet Analysis and Probabilistic Neural NetworkIAES IJAINo ratings yet
- Modeling and Control of Quasi Z-Source Cascaded H-Bridge Multilevel Inverter For Grid Connected Photovoltaic SystemsDocument10 pagesModeling and Control of Quasi Z-Source Cascaded H-Bridge Multilevel Inverter For Grid Connected Photovoltaic SystemsWiwid Ayu NitaNo ratings yet
- A Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataDocument6 pagesA Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataVijay KrishnaNo ratings yet
- Leakage Current Reduction in VLSI Systems: David Blaauw, Steve Martin, Krisztian Flautner, Trevor MudgeDocument13 pagesLeakage Current Reduction in VLSI Systems: David Blaauw, Steve Martin, Krisztian Flautner, Trevor MudgeAkNo ratings yet
- Stability and Transient-Behavioural Assessment of Power-Electronics-Based Dc-Distribution Systems Part 1: The Root-Locus TechniqueDocument9 pagesStability and Transient-Behavioural Assessment of Power-Electronics-Based Dc-Distribution Systems Part 1: The Root-Locus TechniqueŞansal DikmenerNo ratings yet
- 72-A Switched-Capacitor Three-Phase ACAC ConverterDocument11 pages72-A Switched-Capacitor Three-Phase ACAC ConverterJoão GimenesNo ratings yet
- A Control Map For A Bidirectional PWM Plus Phase-Shift-Modulated PushPull DCDC ConDocument11 pagesA Control Map For A Bidirectional PWM Plus Phase-Shift-Modulated PushPull DCDC ConLéo NotzNo ratings yet
- Finite-Control-Set Model-Predictive Control For A Quasi-Z-Source Four-Leg Inverter Under Unbalanced Load ConditionDocument10 pagesFinite-Control-Set Model-Predictive Control For A Quasi-Z-Source Four-Leg Inverter Under Unbalanced Load ConditionckrimyouNo ratings yet
- Implementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRDocument14 pagesImplementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRRamphani NunnaNo ratings yet
- A Coupling Capacitor Voltage Transformer RepresentDocument7 pagesA Coupling Capacitor Voltage Transformer RepresentLucas De MeloNo ratings yet
- Modelling Pressure Deficient Water Distribution Networks in EpanetDocument6 pagesModelling Pressure Deficient Water Distribution Networks in EpanetRahul KumarNo ratings yet
- An Integrated Active and Reactive Power Control Scheme For Grid-Connected Photovoltaic Production SystemsDocument6 pagesAn Integrated Active and Reactive Power Control Scheme For Grid-Connected Photovoltaic Production SystemsKirn ZafarNo ratings yet
- Wang (Base Do Artigo para o CILAMCE 2022)Document20 pagesWang (Base Do Artigo para o CILAMCE 2022)cleuberNo ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Reviews in Computational Chemistry, Volume 31From EverandReviews in Computational Chemistry, Volume 31Abby L. ParrillNo ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Grant CertificateDocument1 pageGrant CertificateRajesh KumarNo ratings yet
- PDFServletDocument1 pagePDFServletRajesh KumarNo ratings yet
- PDFServletDocument1 pagePDFServletRajesh KumarNo ratings yet
- Invoice 5 2538387Document2 pagesInvoice 5 2538387Rajesh KumarNo ratings yet
- ScannerGo 1679130134479Document1 pageScannerGo 1679130134479Rajesh KumarNo ratings yet
- Seminar Report On Adaptive Controllers For Power SystemDocument95 pagesSeminar Report On Adaptive Controllers For Power SystemRajesh KumarNo ratings yet
- Oleg Gulich M SC ThesisDocument106 pagesOleg Gulich M SC ThesisRajesh KumarNo ratings yet
- Innovate With IEEE Information: Smart Grid OrganizationsDocument2 pagesInnovate With IEEE Information: Smart Grid OrganizationsRajesh KumarNo ratings yet
- IEEE-SA Standards-Related Activities For Smart Grid: Bill Ash Strategic Program Manager 12 October 2012Document27 pagesIEEE-SA Standards-Related Activities For Smart Grid: Bill Ash Strategic Program Manager 12 October 2012Rajesh KumarNo ratings yet
- Jewell PSERC Final Project Report T-39 Communications Apr 2012Document165 pagesJewell PSERC Final Project Report T-39 Communications Apr 2012Rajesh KumarNo ratings yet
- Airborn Flexible Circuits Inc. ("Seller") - Sales Order Standard Terms and ConditionsDocument2 pagesAirborn Flexible Circuits Inc. ("Seller") - Sales Order Standard Terms and ConditionsRajesh KumarNo ratings yet
- Challenges in Delivering The Smart Grid: Stephen McarthurDocument36 pagesChallenges in Delivering The Smart Grid: Stephen McarthurRajesh KumarNo ratings yet
- Smart Grid: Definition and ConceptsDocument16 pagesSmart Grid: Definition and ConceptsRajesh KumarNo ratings yet
- AMER UTIL WP Optimizing Performanceellsmartgrid Utility 92439 Am 1005 0510Document12 pagesAMER UTIL WP Optimizing Performanceellsmartgrid Utility 92439 Am 1005 0510Rajesh KumarNo ratings yet
- Advanced Technologies Implementation Framework For A Smart GridDocument7 pagesAdvanced Technologies Implementation Framework For A Smart GridRajesh KumarNo ratings yet
- Electrical Energy Storage Smart Grid Technologies... 2010Document12 pagesElectrical Energy Storage Smart Grid Technologies... 2010Rajesh KumarNo ratings yet
- Expert Group1Document69 pagesExpert Group1Rajesh KumarNo ratings yet
- Success Stories in DOE's ARRA Smart Grid ProgramDocument25 pagesSuccess Stories in DOE's ARRA Smart Grid ProgramRajesh KumarNo ratings yet
- Abb-Power-World-Renz-Ppt Approved 2008 03 14Document65 pagesAbb-Power-World-Renz-Ppt Approved 2008 03 14Rajesh KumarNo ratings yet
- Question Bank Roe086Document47 pagesQuestion Bank Roe086Rajesh KumarNo ratings yet
- EN AC-CNC2019-1D-Mega R1.x Diagram OVERVIEWDocument2 pagesEN AC-CNC2019-1D-Mega R1.x Diagram OVERVIEWLionel SebertNo ratings yet
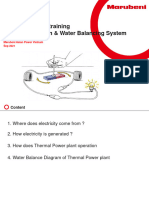
- Power Generation & Water Balancing SystemDocument20 pagesPower Generation & Water Balancing SystemnamakNo ratings yet
- Advantages and Disadvantages of Solar Energy Form 4Document2 pagesAdvantages and Disadvantages of Solar Energy Form 4shshbshshsjsjNo ratings yet
- PCB Lab ManualDocument16 pagesPCB Lab Manualtrivedi_urvi9087No ratings yet
- HXSP-2108B RS-232/RS-485/RS-422 Converter Instruction: SpecificationDocument2 pagesHXSP-2108B RS-232/RS-485/RS-422 Converter Instruction: SpecificationAria SudarmanNo ratings yet
- L298N DataSheetDocument11 pagesL298N DataSheetrendhitaufiqakbarNo ratings yet
- GeneratorDocument218 pagesGeneratorAkshaya kumar mohantyNo ratings yet
- Double SensorDocument2 pagesDouble SensorMariam Matamala FarranNo ratings yet
- Earth Leakage Protection: ContentsDocument5 pagesEarth Leakage Protection: ContentseajNo ratings yet
- Earth Electrode CalculationDocument3 pagesEarth Electrode CalculationNanban VkyNo ratings yet
- Jeannine Uwibambe PDFDocument94 pagesJeannine Uwibambe PDFHassan SouleymanNo ratings yet
- Ti 271Document18 pagesTi 271dobathinhNo ratings yet
- Guia para Diseño de Sistemas HVDCDocument133 pagesGuia para Diseño de Sistemas HVDCRaul Lara100% (1)
- Cired 2017 Tuesday ProgrammeDocument19 pagesCired 2017 Tuesday ProgrammeivanramljakNo ratings yet
- Smart Indoor Power Cabinet For TelecomDocument2 pagesSmart Indoor Power Cabinet For TelecomSyed Furqan RafiqueNo ratings yet
- LS H100 .. Manual Lslv0055h1004cofnDocument610 pagesLS H100 .. Manual Lslv0055h1004cofnNicolae BoaruNo ratings yet
- Electric Traction - 1 PDFDocument46 pagesElectric Traction - 1 PDFbbbbbbbNo ratings yet
- Diagrama de Ignitor BVS-006-ADocument1 pageDiagrama de Ignitor BVS-006-AHector Luis PalomoNo ratings yet
- 25.insulation Testing M4000Document86 pages25.insulation Testing M4000rashid rahmanNo ratings yet
- Electromagnetism Part 4 StudentsDocument16 pagesElectromagnetism Part 4 StudentsSharvinder SinghNo ratings yet
- M7281, M7282, M7284, M7285, M7294 Modutrol IV Motors: Specification DataDocument4 pagesM7281, M7282, M7284, M7285, M7294 Modutrol IV Motors: Specification DataEzequias RoquimNo ratings yet
- Conexion Sr4 Sr4b CaterpillarDocument76 pagesConexion Sr4 Sr4b CaterpillarGAston Guerra100% (1)
- Role and Application of Single Phase Multilevel Inverter in Grid Connected Photovoltaic SystemsDocument30 pagesRole and Application of Single Phase Multilevel Inverter in Grid Connected Photovoltaic SystemsRishi TripathiNo ratings yet
- Ele 3216 2Document44 pagesEle 3216 2ivan.nasasira067No ratings yet
- FA2020 - ENE505 - L5.5 - Nuclear Power AccidentsDocument22 pagesFA2020 - ENE505 - L5.5 - Nuclear Power AccidentsTommy TrojanNo ratings yet
- Brushless ExcitationDocument4 pagesBrushless Excitationmsovais6792100% (2)
- Vector Group of Transformer - Electrical Notes & ArticlesDocument22 pagesVector Group of Transformer - Electrical Notes & ArticlesManoj Kumar PadmanabanNo ratings yet
- Manual de Rejuvenecedor de Pantalla 100-CRTDocument64 pagesManual de Rejuvenecedor de Pantalla 100-CRTJavier Ortiz GuilenNo ratings yet
- Arizona Tucson Electric PowerDocument1 pageArizona Tucson Electric PowerDjibzlaeNo ratings yet
- Riello RBL 553 SeDocument1 pageRiello RBL 553 SeJesus CamaroNo ratings yet