You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Functional Analysis: Gerald TeschlDocument44 pagesFunctional Analysis: Gerald TeschlMehwish QadirNo ratings yet
- On A Class of Problems of Determining The TemperatDocument7 pagesOn A Class of Problems of Determining The Temperatkashif rashidNo ratings yet
- 10.1007@s00233 016 9812 yDocument21 pages10.1007@s00233 016 9812 yOumaima BouaoultaineNo ratings yet
- Ab FLM Revisedv3Document26 pagesAb FLM Revisedv3grinderfox7281No ratings yet
- Oq-2017-Frictional Versus Kelvin-Voigt Damping in A Transmission ProblemDocument7 pagesOq-2017-Frictional Versus Kelvin-Voigt Damping in A Transmission ProblemAndré mashNo ratings yet
- Computers and Mathematics With Applications: Tamer A. AbassyDocument13 pagesComputers and Mathematics With Applications: Tamer A. AbassyAnonymous nimTuOfRgNo ratings yet
- Stability Results of Coupled Wave Models With Locally Memory in A Past History Framework Via Nonsmooth Coefficients On The InterfaceDocument32 pagesStability Results of Coupled Wave Models With Locally Memory in A Past History Framework Via Nonsmooth Coefficients On The InterfaceAndré mashNo ratings yet
- Transmission Line Write UpDocument10 pagesTransmission Line Write UpAbhishek AgrawalNo ratings yet
- A Guide To Spectral TheoryDocument178 pagesA Guide To Spectral Theorybel.dethNo ratings yet
- Annals of Physics: Z. Alizadeh, H. PanahiDocument8 pagesAnnals of Physics: Z. Alizadeh, H. PanahiSamantha Loredo RamirezNo ratings yet
- Ito's and Tanaka's Type Formulae For The Stochastic Heat Equation: The Linear CaseDocument25 pagesIto's and Tanaka's Type Formulae For The Stochastic Heat Equation: The Linear CaselycancapitalNo ratings yet
- 1 Stokes BW AGhV 2017 PDFDocument26 pages1 Stokes BW AGhV 2017 PDFManzur ValentinNo ratings yet
- 2092 4033 1 SMDocument20 pages2092 4033 1 SMyonomasNo ratings yet
- Second Order Equations Three Cases HandoutDocument17 pagesSecond Order Equations Three Cases HandoutvictorNo ratings yet
- Simple OscillatorsDocument41 pagesSimple OscillatorsCristian TuctoNo ratings yet
- History Dependence and Hysteresis Effects in An Investment Model With Adjustment CostsDocument24 pagesHistory Dependence and Hysteresis Effects in An Investment Model With Adjustment CostsrrrrrrrrNo ratings yet
- Electronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeDocument10 pagesElectronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeLuis FuentesNo ratings yet
- Articulo Principio DualDocument18 pagesArticulo Principio DualDaniel NuñezNo ratings yet
- Numerical Modelling of Consolidation With Uncertainty in Soil PropertiesDocument12 pagesNumerical Modelling of Consolidation With Uncertainty in Soil Propertiesde_wightNo ratings yet
- 4 - Flows - and - Lie - DerivativesDocument14 pages4 - Flows - and - Lie - DerivativesLuigi Teixeira de SousaNo ratings yet
- Regularization For Ill Posed Inhomogeneous Evolution Problems in A Hilbert SpaceDocument14 pagesRegularization For Ill Posed Inhomogeneous Evolution Problems in A Hilbert SpaceMelissa Marie HernandezNo ratings yet
- 1 s2.0 S0304414918301418 MainDocument44 pages1 s2.0 S0304414918301418 MainMahendra PerdanaNo ratings yet
- Math 124A - November 10, 2011 Viktor Grigoryan: TT 2 XX TDocument4 pagesMath 124A - November 10, 2011 Viktor Grigoryan: TT 2 XX Tarpan mukherjeeNo ratings yet
- Exercises: Waves in SpaceDocument3 pagesExercises: Waves in SpaceKazaValiShaikNo ratings yet
- Problems in Quantum MechanicsDocument18 pagesProblems in Quantum MechanicsShivnag SistaNo ratings yet
- 1 s2.0 S0022247X13004939 MainDocument16 pages1 s2.0 S0022247X13004939 MainSubrata MajumdarNo ratings yet
- Physics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Document12 pagesPhysics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Ali RazaNo ratings yet
- Periodic Bouncing Solutions For Sublinear Impact OscillatorDocument17 pagesPeriodic Bouncing Solutions For Sublinear Impact OscillatorQian DingbianNo ratings yet
- Exponential Behavior of Neutral Impulsive Stochastic Integro-Differential Equations Driven by Poisson Jumps and Rosenblatt ProcessDocument21 pagesExponential Behavior of Neutral Impulsive Stochastic Integro-Differential Equations Driven by Poisson Jumps and Rosenblatt Processmoulay kebirNo ratings yet
- PYL100 Problem Set: Wave Mechanics: Dr. Rohit Narula October 1, 2016Document4 pagesPYL100 Problem Set: Wave Mechanics: Dr. Rohit Narula October 1, 2016KhushalSethiNo ratings yet
- Übung 2 - 18 - enDocument2 pagesÜbung 2 - 18 - enMircea MartinNo ratings yet
- Exercises For TFFY54 PDFDocument25 pagesExercises For TFFY54 PDFFábio Sin TierraNo ratings yet
- Global Bifurcation and Multiplicity Results For Sturm-Liouville Problems - Jacek GULGOWSKIDocument10 pagesGlobal Bifurcation and Multiplicity Results For Sturm-Liouville Problems - Jacek GULGOWSKIJefferson Johannes Roth FilhoNo ratings yet
- 2019 Symmetry ThermoViscoelastic Model TypeIIIDocument17 pages2019 Symmetry ThermoViscoelastic Model TypeIIIAbraham SegadeNo ratings yet
- 1-2006 Son NAFDocument9 pages1-2006 Son NAFBang Bang NgNo ratings yet
- Stability Result For An Abstract Time Delayed Evolution Equation With Arbitrary Decay of ViscoelasticityDocument20 pagesStability Result For An Abstract Time Delayed Evolution Equation With Arbitrary Decay of ViscoelasticityLaradj CHELLAMANo ratings yet
- U.an Der Heiden, Periodic Solutions of A Nonlinear Second Order Differential Equation With DelayDocument11 pagesU.an Der Heiden, Periodic Solutions of A Nonlinear Second Order Differential Equation With DelayNolbert Yonel Morales TineoNo ratings yet
- Interacting Quantum Fields C6, HT 2015: 1.1 Toy ModelsDocument25 pagesInteracting Quantum Fields C6, HT 2015: 1.1 Toy Modelscifarha venantNo ratings yet
- 2302 MTL102 ODE PartDocument63 pages2302 MTL102 ODE PartAYUSH SINGHNo ratings yet
- Lectures 1-6Document21 pagesLectures 1-6Ravinder KuhadNo ratings yet
- Jung 2019 J. Phys. Conf. Ser. 1365 012005 PDFDocument9 pagesJung 2019 J. Phys. Conf. Ser. 1365 012005 PDFSungki JungNo ratings yet
- V NanotesDocument24 pagesV NanotesAlan AuNo ratings yet
- Impenetrable Barriers in Quantum MechanicsDocument6 pagesImpenetrable Barriers in Quantum MechanicsZbiggNo ratings yet
- Assignment 4. Due Fri., Feb. 6.: Math 555, Winter 2009Document3 pagesAssignment 4. Due Fri., Feb. 6.: Math 555, Winter 2009Gabriel Buendia GarciaNo ratings yet
- Time-Dependent SCHR Odinger Equation: Statistics of The Distribution of Gaussian Packets On A Metric GraphDocument17 pagesTime-Dependent SCHR Odinger Equation: Statistics of The Distribution of Gaussian Packets On A Metric GraphCarlos LopezNo ratings yet
- Collocation Method For Approximate Solution of Volterra - 2020 - Applied NumericDocument10 pagesCollocation Method For Approximate Solution of Volterra - 2020 - Applied NumericYahya NasiriNo ratings yet
- Critical PointDocument347 pagesCritical PointRay GobbiNo ratings yet
- What's Important: Time-Independent Schrödinger EquationDocument5 pagesWhat's Important: Time-Independent Schrödinger Equationombraga1896No ratings yet
- 9,4 WKBDocument2 pages9,4 WKBKevinHdezNo ratings yet
- 10.1515 - Math 2022 0520Document9 pages10.1515 - Math 2022 0520Efrén Urbano Martínez PérezNo ratings yet
- Lec 1-2Document8 pagesLec 1-2Ravinder KuhadNo ratings yet
- 15-04-2020 Hawkes DT ScalingDocument7 pages15-04-2020 Hawkes DT ScalingLuis Ivan Hernández RuízNo ratings yet
- Homework 4Document3 pagesHomework 4uioppoiupiNo ratings yet
- Liao 2019Document6 pagesLiao 2019Chương Quách VănNo ratings yet
- Paper 03. OHAM For PDEs (KDV Eq)Document10 pagesPaper 03. OHAM For PDEs (KDV Eq)Sayiqa JabeenNo ratings yet
- Hamiltonian Mechanics: Author Index 14 Subject Index 14Document17 pagesHamiltonian Mechanics: Author Index 14 Subject Index 14Sergio PalaciosNo ratings yet
- JHBVGV 656Document6 pagesJHBVGV 656Luis MancillaNo ratings yet
- 4 5920319840068834062Document23 pages4 5920319840068834062samslimane6No ratings yet
- Equilibrium Analysis For A Mass-Conserving Model in Presence of CavitationDocument15 pagesEquilibrium Analysis For A Mass-Conserving Model in Presence of CavitationAbdelhadiNo ratings yet
- Mechanical - Engineering - Mechanical Vibrations - Single Degree of Freedom Systems - NotesDocument17 pagesMechanical - Engineering - Mechanical Vibrations - Single Degree of Freedom Systems - NotesJaffar AliNo ratings yet
- Introduction To Free Vibration: MXT KXT MXT KXT X XX VDocument7 pagesIntroduction To Free Vibration: MXT KXT MXT KXT X XX VJaffar AliNo ratings yet
- ME 163 Free Vibrations: Freevib - NBDocument5 pagesME 163 Free Vibrations: Freevib - NBJaffar AliNo ratings yet
- CH 2Document32 pagesCH 2HFNo ratings yet
- EXP-MN-SI020-EN-R0 - Measurements in Instrumentation PDFDocument114 pagesEXP-MN-SI020-EN-R0 - Measurements in Instrumentation PDFbali100% (3)
- Huawei New Generation Telecom Power Solution MTS9000ADocument11 pagesHuawei New Generation Telecom Power Solution MTS9000Atiennv26No ratings yet
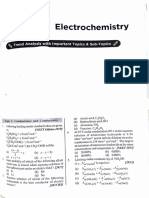
- Electrochemistry WorksheetDocument6 pagesElectrochemistry WorksheetVincent van GoghNo ratings yet
- BUILDING UTILITIES 2 Building HVAC SystemsDocument142 pagesBUILDING UTILITIES 2 Building HVAC Systemsjona serranoNo ratings yet
- CH 5Document46 pagesCH 5Chala1989No ratings yet
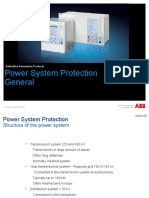
- Power System Protection General: Substation Automation ProductsDocument48 pagesPower System Protection General: Substation Automation ProductsRobert MihayoNo ratings yet
- E by M Thomson MethodDocument9 pagesE by M Thomson MethodReddyvari Venugopal33% (3)
- Motion in A Straight Line - DPP-04 (Of Lec-07) - Arjuna NEET 2024Document3 pagesMotion in A Straight Line - DPP-04 (Of Lec-07) - Arjuna NEET 2024kumar ashvikNo ratings yet
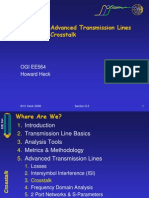
- Module 5: Advanced Transmission Lines Topic 3: Crosstalk: OGI EE564 Howard HeckDocument35 pagesModule 5: Advanced Transmission Lines Topic 3: Crosstalk: OGI EE564 Howard HeckVivek ShrivastavaNo ratings yet
- 《固体物理导论》 习题解答.charles Kittel.2004年第8版.introduction to Solid State Physics Solution ManualDocument61 pages《固体物理导论》 习题解答.charles Kittel.2004年第8版.introduction to Solid State Physics Solution ManualSane LeeNo ratings yet
- Assignment 1 - Fluid StaticsDocument3 pagesAssignment 1 - Fluid StaticsaarijNo ratings yet
- Flashcards - Topic 1 Measurements and Their Errors - AQA Physics A-LevelDocument113 pagesFlashcards - Topic 1 Measurements and Their Errors - AQA Physics A-LevellylyNo ratings yet
- EASA AC Redesign Manual V.0214-0815 PDFDocument140 pagesEASA AC Redesign Manual V.0214-0815 PDFDon FreemanNo ratings yet
- MCQ'SDocument14 pagesMCQ'SAnees EjazNo ratings yet
- 401985Document82 pages401985Julio Cesar Garcia ReyesNo ratings yet
- Reference Power Systems Protection Handbook PDFDocument196 pagesReference Power Systems Protection Handbook PDFJavier Condori Quilla100% (1)
- Theory and Application of Excavation Management System For Slurry TBM in SingaporeDocument18 pagesTheory and Application of Excavation Management System For Slurry TBM in SingaporeSAMİ ENİS ARIOĞLUNo ratings yet
- Bare Aluminium Conductors, ACSR and ABC Cables: Cables (M) Sdn. BHDDocument24 pagesBare Aluminium Conductors, ACSR and ABC Cables: Cables (M) Sdn. BHDgosalhs9395No ratings yet
- Relative Motion in One Dimension 1D and 2DDocument16 pagesRelative Motion in One Dimension 1D and 2DChristine RomanillosNo ratings yet
- Metal Oxide Varistors Datasheet PDFDocument1 pageMetal Oxide Varistors Datasheet PDFHernàn NùñezNo ratings yet
- Gyroscopic Forces Modeled in AnsysDocument92 pagesGyroscopic Forces Modeled in AnsysGiuseppe Failla100% (1)
- Ca HD4-R (En) H 1VCP000028-1602Document64 pagesCa HD4-R (En) H 1VCP000028-1602LEANDRONo ratings yet
- DK17 - EN, 400 KV Cable Project Aarhus-AalborgDocument4 pagesDK17 - EN, 400 KV Cable Project Aarhus-Aalborgb33lawNo ratings yet
- 7b Oil BurnersDocument45 pages7b Oil BurnersArul SankaranNo ratings yet
- Center of GravityDocument45 pagesCenter of GravityMandrata LimdrawanNo ratings yet
- C - Trigonometric IdentitiesDocument37 pagesC - Trigonometric IdentitiesMaroNo ratings yet
- IED-Review Engineering Formula SheetDocument10 pagesIED-Review Engineering Formula Sheetedhy_03100% (1)
- Mathcad - Duopitch Roof Wind Design LoadsDocument13 pagesMathcad - Duopitch Roof Wind Design LoadsValentin100% (1)
- Free Settling: Settling and Sedimentation For Solid-Liquid SeparationDocument14 pagesFree Settling: Settling and Sedimentation For Solid-Liquid SeparationDM JavierNo ratings yet
- (Ramesh Bansal (Eds.) ) Handbook of Distributed Gen (B-Ok - Xyz)Document813 pages(Ramesh Bansal (Eds.) ) Handbook of Distributed Gen (B-Ok - Xyz)Abdurrahman shuaib100% (2)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (409)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- Chernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterFrom EverandChernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterRating: 4 out of 5 stars4/5 (264)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsFrom EverandThe Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsRating: 5 out of 5 stars5/5 (5)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- The Reality Revolution: The Mind-Blowing Movement to Hack Your RealityFrom EverandThe Reality Revolution: The Mind-Blowing Movement to Hack Your RealityRating: 4.5 out of 5 stars4.5/5 (19)