You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 011177073Document7 pages011177073Adrian Cocis100% (1)
- Data - Analysis On Rape VictimsDocument11 pagesData - Analysis On Rape VictimsHarish BNo ratings yet
- BRM Lecture 2 - 053 Bridge Resource ManagementDocument23 pagesBRM Lecture 2 - 053 Bridge Resource ManagementMichael Miller100% (5)
- CFBC Maintenance CostDocument16 pagesCFBC Maintenance Costyogeshmangal1317100% (1)
- 250 HMI 475 SpecsDocument3 pages250 HMI 475 SpecsProyectil De Proyecto100% (1)
- Robin Alston Library History SourcesDocument52 pagesRobin Alston Library History SourcesAndrew PrescottNo ratings yet
- Introduction To SAP UI5Document11 pagesIntroduction To SAP UI5EugeneNo ratings yet
- BRM Group 10 - PaezDocument13 pagesBRM Group 10 - Paezpriyam dixitNo ratings yet
- Maag WA One-Stage Gear Unit: For Horizontal Mill DrivesDocument8 pagesMaag WA One-Stage Gear Unit: For Horizontal Mill DrivesMuhammadNo ratings yet
- Application of Eigenvalues and Eigenvectors.Document10 pagesApplication of Eigenvalues and Eigenvectors.Harish BNo ratings yet
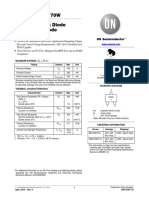
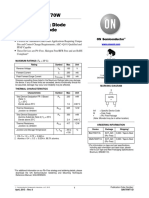
- BAV70W, SBAV70W Dual Switching Diode Common Cathode: FeaturesDocument5 pagesBAV70W, SBAV70W Dual Switching Diode Common Cathode: FeaturesHarish BNo ratings yet
- BAV70W, SBAV70W Dual Switching Diode Common Cathode: FeaturesDocument5 pagesBAV70W, SBAV70W Dual Switching Diode Common Cathode: FeaturesHarish BNo ratings yet
- Harish B Ufc Data AnalysisDocument19 pagesHarish B Ufc Data AnalysisHarish BNo ratings yet
- Audde BookDocument80 pagesAudde BookHarish BNo ratings yet
- Honeywell CT45XP CT45 Configuration Guide GLOBAL V2Document47 pagesHoneywell CT45XP CT45 Configuration Guide GLOBAL V2Roy SalasNo ratings yet
- 22 CONSTANTIN Doru Teza 5oct - 2018 - Signed - Teza Doctorat Imbunatatire Comfort Sisteme TransportDocument137 pages22 CONSTANTIN Doru Teza 5oct - 2018 - Signed - Teza Doctorat Imbunatatire Comfort Sisteme TransportCășeriu BiancaNo ratings yet
- Chapter 4: Redemption of Pref Share & Debentures Topic: Redemption of Debentures. Practice QuestionsDocument53 pagesChapter 4: Redemption of Pref Share & Debentures Topic: Redemption of Debentures. Practice QuestionsMercy GamingNo ratings yet
- FM formulas-Unit-6ADocument12 pagesFM formulas-Unit-6AÃkŞʜʌy VəřMʌNo ratings yet
- Audiolingual Method (Alm) : Elt MethodologyDocument11 pagesAudiolingual Method (Alm) : Elt Methodologyrm53No ratings yet
- Samuel Kostecki: About MeDocument2 pagesSamuel Kostecki: About Mesamuel kosteckiNo ratings yet
- What Is National Security ActDocument3 pagesWhat Is National Security ActlolNo ratings yet
- 10 Questions For Comprehensive Succession PlanningDocument2 pages10 Questions For Comprehensive Succession PlanningBESmithIncNo ratings yet
- Undergraduate Research ProjectDocument47 pagesUndergraduate Research ProjectToyin Michael Onagoruwa XviNo ratings yet
- 077154C-000-STC-0490-000 - B - STD - Const. DrawingDocument79 pages077154C-000-STC-0490-000 - B - STD - Const. DrawingDarshan PanchalNo ratings yet
- Catalogo Marmol Artificial - Kingkonree International China Surface Industrial Co., LTDDocument67 pagesCatalogo Marmol Artificial - Kingkonree International China Surface Industrial Co., LTDTDNRamonNo ratings yet
- DDQ-20L6SC CN-090Document41 pagesDDQ-20L6SC CN-090Alfredo Valencia RodriguezNo ratings yet
- Updated: Mimaropa Regional Research and Development Agenda (MRDA) 2018-2022Document22 pagesUpdated: Mimaropa Regional Research and Development Agenda (MRDA) 2018-2022Jomer GonzalesNo ratings yet
- Rebuilding The Base: How Al-Qaida Could ResurgeDocument13 pagesRebuilding The Base: How Al-Qaida Could ResurgeguiludwigNo ratings yet
- Apple Imac G4 800 - Apple - Q59 - MLB - DVT - 051-6497 - Rev13Document69 pagesApple Imac G4 800 - Apple - Q59 - MLB - DVT - 051-6497 - Rev13Raul Alexandru CuldaNo ratings yet
- Commercial Non-Commercial: Customs InvoiceDocument2 pagesCommercial Non-Commercial: Customs InvoiceJavierNo ratings yet
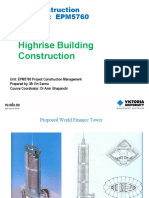
- 2C Highrise ConstructionDocument30 pages2C Highrise ConstructionfunkkataNo ratings yet
- Chemistry Stage 6 Year 12 Assessment Task and Marking Guidelines Titration Prac ExamDocument6 pagesChemistry Stage 6 Year 12 Assessment Task and Marking Guidelines Titration Prac ExamD Ray0% (1)
- Version For Internet Nutrition Spreadsheet (With Workout Tracker)Document10 pagesVersion For Internet Nutrition Spreadsheet (With Workout Tracker)GeraldyneNo ratings yet
- Ict351 4 Logical FormulasDocument32 pagesIct351 4 Logical FormulastheoskatokaNo ratings yet
- Stone Washing Process of Denim FabricDocument11 pagesStone Washing Process of Denim FabricNguyễn Huy CườngNo ratings yet
- Sample Reciprocity LetterDocument1 pageSample Reciprocity LetterRrichard Prieto MmallariNo ratings yet