You might also like
- Unit - 5 Serial CommunicationDocument51 pagesUnit - 5 Serial CommunicationM.venkateshNo ratings yet
- CommunicationDocument23 pagesCommunicationBarbie VeniNo ratings yet
- ES Unit-5Document67 pagesES Unit-5palaji pradeepNo ratings yet
- Serial Communication TutorialDocument12 pagesSerial Communication TutorialmCmAl100% (2)
- IOT ProtocolsDocument66 pagesIOT ProtocolsAttota Appa RaoNo ratings yet
- Unit 6 MCDocument44 pagesUnit 6 MCkaustubhNo ratings yet
- Unit-V Communication Interface Basics of Serial CommunicationDocument16 pagesUnit-V Communication Interface Basics of Serial CommunicationTechnoGateKhammamNo ratings yet
- Serial Communication Protocols and RTCDocument15 pagesSerial Communication Protocols and RTCMukesh PatidarNo ratings yet
- Fundamentals of Microcontroller & Its Application: Unit-IvDocument17 pagesFundamentals of Microcontroller & Its Application: Unit-IvRajan PatelNo ratings yet
- Basics of SPI Communication ProtocolDocument19 pagesBasics of SPI Communication ProtocolNEETHU PRAKASH100% (1)
- 05 Communication ProtocolDocument88 pages05 Communication ProtocolRobo KitNo ratings yet
- Serial InterfaceDocument19 pagesSerial InterfaceHafizNo ratings yet
- Chapter 3 - Serial Interfacing With Microprocessor Based SystemDocument28 pagesChapter 3 - Serial Interfacing With Microprocessor Based SystemSuroj BurlakotiNo ratings yet
- Data Communication: CT101 - Computing SystemsDocument23 pagesData Communication: CT101 - Computing SystemsMuneeb AhmadNo ratings yet
- An 1Document6 pagesAn 1Carlos H. GojleviciusNo ratings yet
- Basics of SPI Communication ProtocolDocument19 pagesBasics of SPI Communication ProtocolNEETHU PRAKASHNo ratings yet
- Uart, Spi & I2cDocument12 pagesUart, Spi & I2cdeepakacharya424No ratings yet
- MODULE 4: 8051 Serial Port Programming in Assembly and C: Microcontroller Notes:18EE52Document51 pagesMODULE 4: 8051 Serial Port Programming in Assembly and C: Microcontroller Notes:18EE52SuprithaNo ratings yet
- Data TransmissionDocument15 pagesData TransmissionLemar C. ManarpaacNo ratings yet
- Islamic University of Technology: EEE 4483 Digital Electronics & Pulse TechniquesDocument20 pagesIslamic University of Technology: EEE 4483 Digital Electronics & Pulse TechniquesMUHAMMAD JAWAD CHOWDHURY, 180041228No ratings yet
- CURS 6 Protocoale FireDocument38 pagesCURS 6 Protocoale FireCosmina DulhanNo ratings yet
- Chapter 3 - Serial Interfacing With Microprocessor Based SystemDocument28 pagesChapter 3 - Serial Interfacing With Microprocessor Based SystemAarav PoudelNo ratings yet
- Unit - 4: 4.1. Serial Data Communication - BasicsDocument16 pagesUnit - 4: 4.1. Serial Data Communication - BasicsRAJU VALLEPUNo ratings yet
- Microprocessor & Microcontrollers: Serial CommunicationDocument36 pagesMicroprocessor & Microcontrollers: Serial CommunicationAbdul Rehman AfzalNo ratings yet
- Devasi Sir SerialDocument18 pagesDevasi Sir Serialforloginusethis accountNo ratings yet
- UartDocument3 pagesUartGokul Kuthati100% (2)
- RS232, I2C, SPI - Serial Communication Protocols OverviewDocument20 pagesRS232, I2C, SPI - Serial Communication Protocols Overviewabhi_vlsiNo ratings yet
- Embedded Systems - Day 4Document37 pagesEmbedded Systems - Day 4199SARAS MISHRANo ratings yet
- Multi Channel UartDocument46 pagesMulti Channel UartSriram Pavan Kumar100% (1)
- Data Transmission: (Network and Data Communication)Document16 pagesData Transmission: (Network and Data Communication)Gaurav SaroyaNo ratings yet
- Peripheral Interfacing-Iii: ObjectivesDocument22 pagesPeripheral Interfacing-Iii: ObjectivesAnkit SethiaNo ratings yet
- Serial Data Transfer FundamentalsDocument16 pagesSerial Data Transfer Fundamentalssreekantha2013No ratings yet
- Design-AssignmentDocument9 pagesDesign-Assignmentrfvb5qtxk4No ratings yet
- Computer Networks and Distributed SystemsDocument29 pagesComputer Networks and Distributed SystemsNaser ArabNo ratings yet
- CENG507 Fall2020 Chap3Document49 pagesCENG507 Fall2020 Chap3Anonymous phisherNo ratings yet
- Data Communication FileDocument60 pagesData Communication FileKaran SinghNo ratings yet
- Serial Data Communication in 8051 MicrocontrollerDocument6 pagesSerial Data Communication in 8051 MicrocontrollerNileshNo ratings yet
- STM32F3 UsartDocument67 pagesSTM32F3 UsartZarija Aleksoski100% (1)
- SKCET Serial Communication LectureDocument56 pagesSKCET Serial Communication LecturepriyaNo ratings yet
- CommunicationsDocument24 pagesCommunicationsMohamed RashidNo ratings yet
- UNIT-1 Serial BusesDocument67 pagesUNIT-1 Serial BusesJalal WadoodNo ratings yet
- Com 318-CH5-7Document42 pagesCom 318-CH5-7Garry MehrokNo ratings yet
- Data Communications and Multiplexing: What Is Data Transmission?Document13 pagesData Communications and Multiplexing: What Is Data Transmission?AniketNo ratings yet
- Serial Communication Interview Questions and AnswersDocument9 pagesSerial Communication Interview Questions and AnswerszhangyiliNo ratings yet
- Serial CommunicationsDocument23 pagesSerial CommunicationsPhuoc Trung Tran100% (1)
- 1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatDocument5 pages1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatrajeshNo ratings yet
- Input-Output Interfaces and Communication ProtocolsDocument21 pagesInput-Output Interfaces and Communication ProtocolsBlackk SpydoNo ratings yet
- Sonet/Sdh: Channel 1 Channel 1Document7 pagesSonet/Sdh: Channel 1 Channel 1rthrbyNo ratings yet
- Topic: 1.2.1 Data Transmission: Chapter: 1.2 Communication and Internet TechnologiesDocument9 pagesTopic: 1.2.1 Data Transmission: Chapter: 1.2 Communication and Internet TechnologiesAditya GhoseNo ratings yet
- EMT 3202 - Notes 2Document30 pagesEMT 3202 - Notes 2burna.test22No ratings yet
- Chapter 4Document30 pagesChapter 4udgam pandeyNo ratings yet
- Embedded Systems Reference MaterialDocument59 pagesEmbedded Systems Reference Materialsreekar723No ratings yet
- Cam Unit Iv - Part I - v1Document19 pagesCam Unit Iv - Part I - v1shatanand SharmaNo ratings yet
- Networking CHAPTER 1Document8 pagesNetworking CHAPTER 1Aiko GerongNo ratings yet
- Synchronous Optical NetworkDocument5 pagesSynchronous Optical Networkdeepaknath2200No ratings yet
- One Bit at A Time, Slower and Less No of Cables RequiredDocument23 pagesOne Bit at A Time, Slower and Less No of Cables RequiredKiran KumarNo ratings yet
- Internetworking Devices: Cables Repeaters Hubs Bridges Switches RoutersDocument13 pagesInternetworking Devices: Cables Repeaters Hubs Bridges Switches RoutersPrashanth PrashuNo ratings yet
- Computer Networking: An introductory guide for complete beginners: Computer Networking, #1From EverandComputer Networking: An introductory guide for complete beginners: Computer Networking, #1Rating: 4.5 out of 5 stars4.5/5 (2)
- 5 Slides AboutMagneticSusceptiblity 0 0Document10 pages5 Slides AboutMagneticSusceptiblity 0 0Gopinathan MNo ratings yet
- 8051 Interrupts: 1 Interrupt SourcesDocument5 pages8051 Interrupts: 1 Interrupt SourcescrsarinNo ratings yet
- 8051 Assembly Language ProgrammingDocument24 pages8051 Assembly Language ProgrammingJayven BorjaNo ratings yet
- MPMC Digtal NotesDocument129 pagesMPMC Digtal NotesMr.K Sanath KumarNo ratings yet
- Addressing Modes: SFR Registers, General Purpose RegistersDocument17 pagesAddressing Modes: SFR Registers, General Purpose RegistersGopinathan MNo ratings yet
- 3 8th Standard Term 3 5 in 1 Sura Guides Notes Download Tamil Medium 2Document121 pages3 8th Standard Term 3 5 in 1 Sura Guides Notes Download Tamil Medium 2Gopinathan MNo ratings yet
- Data TransferDocument4 pagesData TransferGopinathan MNo ratings yet
- 2 Chapter 1. Introduction To The Mc9S08Qg4/8 HardwareDocument3 pages2 Chapter 1. Introduction To The Mc9S08Qg4/8 HardwareGopinathan MNo ratings yet
- Addressing modes and arithmetic instructions for 8051 microcontrollerDocument32 pagesAddressing modes and arithmetic instructions for 8051 microcontrollerVineet Kumar PandeyNo ratings yet
- Cach25C - Chemistry - Ii: Öpõkuqøn Dû Gßóõà Gßú?Document6 pagesCach25C - Chemistry - Ii: Öpõkuqøn Dû Gßóõà Gßú?Gopinathan MNo ratings yet
- Unit - I Difference Between Microprocessor and MicrocontrollerDocument30 pagesUnit - I Difference Between Microprocessor and MicrocontrollerGopinathan MNo ratings yet
- Addressing Modes: SFR Registers, General Purpose RegistersDocument17 pagesAddressing Modes: SFR Registers, General Purpose RegistersGopinathan MNo ratings yet
- 17feb Physics PiiiDocument19 pages17feb Physics PiiiGopinathan MNo ratings yet
- Keyboard/Display Controller - Intel 8279Document16 pagesKeyboard/Display Controller - Intel 8279Anamika singhNo ratings yet
- CSIR-UGC NET Exam Guide for Chemical SciencesDocument3 pagesCSIR-UGC NET Exam Guide for Chemical SciencespikumarNo ratings yet
- Session Paper Number of Questions Marks Duration: First I 50 ×2 100 1 Hours 100 Questions 100×2 200 2 HoursDocument5 pagesSession Paper Number of Questions Marks Duration: First I 50 ×2 100 1 Hours 100 Questions 100×2 200 2 HoursGopinathan MNo ratings yet
- CSIR-UGC NET Physical Sciences Exam GuideDocument3 pagesCSIR-UGC NET Physical Sciences Exam GuideMaruthiNo ratings yet
- 27NOV Physics PII PDFDocument14 pages27NOV Physics PII PDFTrilok AkhaniNo ratings yet
- PG TRB PHYSICS STUDY MATERIAL - PDF'Document150 pagesPG TRB PHYSICS STUDY MATERIAL - PDF'Gopinathan M91% (11)
- Chemical Science - SET SyllabusDocument7 pagesChemical Science - SET SyllabusganeshNo ratings yet
- Provisional Application FormDocument1 pageProvisional Application FormGopinathan MNo ratings yet
- SllybusDocument4 pagesSllybusSourav DuttaNo ratings yet
- Periyar University: Procedure To Apply For CertificatesDocument2 pagesPeriyar University: Procedure To Apply For CertificatesGopinathan MNo ratings yet
- 33 3 ADocument32 pages33 3 AGopinathan MNo ratings yet
- 1dec Chemical Sciences PiiiDocument32 pages1dec Chemical Sciences PiiiYocobSamandrewsNo ratings yet
- 27NOV Physics PII PDFDocument14 pages27NOV Physics PII PDFTrilok AkhaniNo ratings yet
- Apr33317 ADocument32 pagesApr33317 AGopinathan MNo ratings yet
- 1dec Chemical Sciences PiiiDocument32 pages1dec Chemical Sciences PiiiYocobSamandrewsNo ratings yet
- Chemical Science Test BookletDocument32 pagesChemical Science Test BookletGopinathan MNo ratings yet
- Free Electrons LabsDocument46 pagesFree Electrons LabsAbbas Raza ZaidiNo ratings yet
- Samsung sgh-l770 Service Manual PDFDocument21 pagesSamsung sgh-l770 Service Manual PDFjose03No ratings yet
- SBC ShematicsDocument16 pagesSBC ShematicsTom TommyNo ratings yet
- 041 03997 0 Adg714Document16 pages041 03997 0 Adg714Syed TanveerNo ratings yet
- The 8051 Microcontroller Based Embedded SystemsDocument45 pagesThe 8051 Microcontroller Based Embedded Systemsmanishpatel_7950% (8)
- TDA7563BDocument33 pagesTDA7563BDiego AndroidNo ratings yet
- HDC 2022Document49 pagesHDC 2022DaniNo ratings yet
- HP03SDocument7 pagesHP03SMinh Trí KnightNo ratings yet
- AVR Development Board Features and Programming GuideDocument17 pagesAVR Development Board Features and Programming GuideVipul MistryNo ratings yet
- Triumph Board Led LCD Service ManualDocument18 pagesTriumph Board Led LCD Service ManualJani LeoNo ratings yet
- AmeyDocument30 pagesAmeyameyraut0021No ratings yet
- Technical Training II Manual 2022 Sem ADocument35 pagesTechnical Training II Manual 2022 Sem ACc CcNo ratings yet
- COMPAQ A900 LA-3981P v10 1022 - JBL81Document42 pagesCOMPAQ A900 LA-3981P v10 1022 - JBL81Abubakar SidikNo ratings yet
- 24AA64/24LC64/24FC64: 64K I C™ Serial EEPROMDocument45 pages24AA64/24LC64/24FC64: 64K I C™ Serial EEPROMJuan Carlos CrespoNo ratings yet
- EepromDocument16 pagesEepromRafael Ricardo Zacarias Castillo100% (1)
- Tda 7313Document15 pagesTda 7313jordachadiNo ratings yet
- Digital Controlled Stereo Audio Processor with Loudness and Volume ControlDocument13 pagesDigital Controlled Stereo Audio Processor with Loudness and Volume ControlJose BenavidesNo ratings yet
- Neil Cameron - ESP32 Formats and CommunicationDocument657 pagesNeil Cameron - ESP32 Formats and CommunicationSai Krishna K VNo ratings yet
- Monolithic Digital Stereo FM Transmitter Radio-Station-on-a-Chip™Document23 pagesMonolithic Digital Stereo FM Transmitter Radio-Station-on-a-Chip™EISENNo ratings yet
- Eex4436 Assignment 01. 416960756Document18 pagesEex4436 Assignment 01. 416960756RusHan SenavirathnaNo ratings yet
- PCF8574 and PCF8574A I/O ExpandersDocument2 pagesPCF8574 and PCF8574A I/O ExpandersAndrei AdrianNo ratings yet
- 2 MarksDocument30 pages2 MarksAnitha Kumari SivathanuNo ratings yet
- PGA305 Signal Conditioner and Transmitter For Pressure SensorsDocument81 pagesPGA305 Signal Conditioner and Transmitter For Pressure SensorsFaisalNo ratings yet
- Intel® Core™ I7-900 Mobile Processor Extreme Edition Series, Intel® Core™ I7-800 and I7-700 Mobile Processor Series Datasheet - Volume 2Document313 pagesIntel® Core™ I7-900 Mobile Processor Extreme Edition Series, Intel® Core™ I7-800 and I7-700 Mobile Processor Series Datasheet - Volume 2aqua01100% (1)
- SingleTact ManualDocument32 pagesSingleTact ManualMohammed Yasser AlgailanyNo ratings yet
- How To Isolate Signal and Power For I C InterfacesDocument3 pagesHow To Isolate Signal and Power For I C InterfacesCícero Domingos JuniorNo ratings yet
- Abbriviations SiemensDocument12 pagesAbbriviations SiemensmahmoudidworkNo ratings yet
- Sths 34 PF 80Document13 pagesSths 34 PF 80davidNo ratings yet
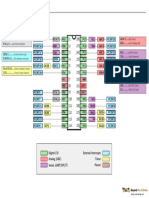
- ATmega328 Pin Diagram Cheat SheetDocument1 pageATmega328 Pin Diagram Cheat SheeterxetoNo ratings yet
- QN-8035 - Sintonia FMDocument39 pagesQN-8035 - Sintonia FMSergio MuriloNo ratings yet