You might also like
- Curvilinear Coordinates and General TensorsDocument2 pagesCurvilinear Coordinates and General TensorsSayantanNo ratings yet
- Lec - Notes On ElectromagnetismDocument26 pagesLec - Notes On ElectromagnetismHabyarimana ProjecteNo ratings yet
- The Infinite Square Well: PHY3011 Wells and Barriers Page 1 of 17Document17 pagesThe Infinite Square Well: PHY3011 Wells and Barriers Page 1 of 17JumanoheNo ratings yet
- Sol5 PDFDocument31 pagesSol5 PDFMichael ARKNo ratings yet
- Two Step Methods For Variational Inequalities On Hadamard ManifoldsDocument5 pagesTwo Step Methods For Variational Inequalities On Hadamard ManifoldsSIDDHARTH MITRANo ratings yet
- 2.5.2 Multivariate DensityDocument12 pages2.5.2 Multivariate DensitymiltonsarriaNo ratings yet
- Additional Theory For Module 4: Dynamic Analysis: Eigensolution ExampleDocument7 pagesAdditional Theory For Module 4: Dynamic Analysis: Eigensolution ExamplephysicsnewblolNo ratings yet
- Parameter EstimationDocument34 pagesParameter EstimationJose Leonardo Simancas GarciaNo ratings yet
- cs229 Notes9 PDFDocument9 pagescs229 Notes9 PDFShubhamKhodiyarNo ratings yet
- Ed 2 4 New PDFDocument19 pagesEd 2 4 New PDFPronoy DasNo ratings yet
- Matrix Formulas For Semi Linear Back PropagationDocument30 pagesMatrix Formulas For Semi Linear Back PropagationdanielcrespinNo ratings yet
- Rarefied Gas Dynamics - DSMC CourseDocument50 pagesRarefied Gas Dynamics - DSMC CourseyicdooNo ratings yet
- 1 The Lorentz TransformationDocument9 pages1 The Lorentz TransformationRayShefhNo ratings yet
- Repor TensorDocument36 pagesRepor TensorTanu ChoudharyNo ratings yet
- Mathematical Economics: 1 What To StudyDocument23 pagesMathematical Economics: 1 What To Studyjrvv2013gmailNo ratings yet
- Coordinate Systems and TransformationsDocument20 pagesCoordinate Systems and TransformationsPraveen Nayak BhukyaNo ratings yet
- Tens CDocument10 pagesTens Ctn1750No ratings yet
- Lecture 12Document7 pagesLecture 12Dane SinclairNo ratings yet
- 1 Lorentz Invariance and QM: 1 dX (τ) dτ dX (τ) dτ 0Document5 pages1 Lorentz Invariance and QM: 1 dX (τ) dτ dX (τ) dτ 0joshua7312No ratings yet
- Covariance Matrix (W Krzanowski)Document5 pagesCovariance Matrix (W Krzanowski)ANDRES OLAYA MONTESNo ratings yet
- An Introduction To Polynomial Integration, The Natural Logarithm, and ArctangentDocument9 pagesAn Introduction To Polynomial Integration, The Natural Logarithm, and ArctangentAnonymous CEFIwCWNo ratings yet
- Physics 127a: Class Notes: Lecture 8: PolymersDocument11 pagesPhysics 127a: Class Notes: Lecture 8: PolymersBiros theodorNo ratings yet
- Interpolation Methods: Peter Wolfgang GR Aber Systems Analysis in Water ManagementDocument38 pagesInterpolation Methods: Peter Wolfgang GR Aber Systems Analysis in Water ManagementSam JohnNo ratings yet
- GR Problems5Document2 pagesGR Problems5Indrajit KamalanathanNo ratings yet
- Coordinate TransformationsDocument37 pagesCoordinate TransformationsVisakh MGNo ratings yet
- Karmarkar's Method: Appendix EDocument8 pagesKarmarkar's Method: Appendix Elaxmi mahtoNo ratings yet
- Handout B: Linear Algebra Cheat Sheet: 1.1 Vectors and MatricesDocument9 pagesHandout B: Linear Algebra Cheat Sheet: 1.1 Vectors and MatricesFrancisNo ratings yet
- Classical FieldsDocument95 pagesClassical FieldsHari BilasiNo ratings yet
- Introduction To DiscretizationDocument10 pagesIntroduction To DiscretizationpolkafNo ratings yet
- Contraction PDFDocument27 pagesContraction PDFMauriNo ratings yet
- Linear Algebraic Equations, SVD, and The Pseudo-Inverse: 1 A Little BackgroundDocument8 pagesLinear Algebraic Equations, SVD, and The Pseudo-Inverse: 1 A Little BackgroundZeus HeraklesNo ratings yet
- Notes On Derivatives of VectorsDocument12 pagesNotes On Derivatives of VectorsMirabella AstraNo ratings yet
- Variance and Standard Deviation Math 217 Probability and StatisticsDocument3 pagesVariance and Standard Deviation Math 217 Probability and StatisticsThầy Trung Cấp TốcNo ratings yet
- General Principles of Brane Kinematics and DynamicsDocument12 pagesGeneral Principles of Brane Kinematics and DynamicsOliver BardinNo ratings yet
- Ineq Lagrange PDFDocument7 pagesIneq Lagrange PDFGeta BercaruNo ratings yet
- Physics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Document12 pagesPhysics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Ali RazaNo ratings yet
- Theoretical Cosmology and Astrophysics Lecture Notes - Chapter 7Document8 pagesTheoretical Cosmology and Astrophysics Lecture Notes - Chapter 7pacos2020No ratings yet
- Lorentz TensorsDocument10 pagesLorentz TensorsGerardus Urrutia SNo ratings yet
- On The Eigenspectrum of The Gram Matrix and Its Relationship To The Operator EigenspectrumDocument18 pagesOn The Eigenspectrum of The Gram Matrix and Its Relationship To The Operator EigenspectrumMartine DumontNo ratings yet
- A Brief Survey of Differential Geometry: Adrian Down August 29, 2006Document5 pagesA Brief Survey of Differential Geometry: Adrian Down August 29, 2006NeenaKhanNo ratings yet
- The Multivariate Gaussian Distribution: 1 Relationship To Univariate GaussiansDocument10 pagesThe Multivariate Gaussian Distribution: 1 Relationship To Univariate Gaussiansandrewjbrereton31No ratings yet
- Series 1, Oct 1st, 2013 Probability and Related) : Machine LearningDocument4 pagesSeries 1, Oct 1st, 2013 Probability and Related) : Machine Learningshelbot22No ratings yet
- Homework in Mathematical Hydrodynamics: BJ Orn GustafssonDocument8 pagesHomework in Mathematical Hydrodynamics: BJ Orn GustafssonLeonard De Los ReyesNo ratings yet
- Proxscal 1Document14 pagesProxscal 1api-3765641100% (1)
- Quantum Field Theory Notes: Ryan D. Reece November 27, 2007Document23 pagesQuantum Field Theory Notes: Ryan D. Reece November 27, 2007jamaeeNo ratings yet
- Ps 1Document3 pagesPs 1wem qiaoNo ratings yet
- Electrodynamics-Point ParticlesDocument15 pagesElectrodynamics-Point ParticlesIrvin MartinezNo ratings yet
- Lecture 14: Principal Component Analysis: Computing The Principal ComponentsDocument6 pagesLecture 14: Principal Component Analysis: Computing The Principal ComponentsShebinNo ratings yet
- ch3 Special RelativityDocument6 pagesch3 Special RelativitybilalhussainsamtiaNo ratings yet
- Lecture 24Document9 pagesLecture 24Kenya LevyNo ratings yet
- Composite Quantum WellsDocument7 pagesComposite Quantum WellsRafael BautistaNo ratings yet
- A Simple Explanation of Partial Least SquaresDocument10 pagesA Simple Explanation of Partial Least Squarestianao kangNo ratings yet
- S10 Prodigies PPTDocument33 pagesS10 Prodigies PPTKrish GuptaNo ratings yet
- Hlektronika ShmeivseisDocument34 pagesHlektronika ShmeivseisPANKOPANKNo ratings yet
- Functions from Rn to Rm: Coordinate Transformations and Vector FieldsDocument14 pagesFunctions from Rn to Rm: Coordinate Transformations and Vector FieldsTeresa Villena GonzálezNo ratings yet
- UntitledDocument9 pagesUntitledAkash RupanwarNo ratings yet
- Econometrics (EM2008) The K-Variable Linear Regression ModelDocument46 pagesEconometrics (EM2008) The K-Variable Linear Regression ModelSelMarie Nutelliina GomezNo ratings yet
- Lec8 SeriesDocument21 pagesLec8 SeriesKondwani BandaNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- C7.5 Lecture 14: The Schwarzschild Solution 1: The Metric and Gravitational RedshiftDocument13 pagesC7.5 Lecture 14: The Schwarzschild Solution 1: The Metric and Gravitational RedshiftBhat SaqibNo ratings yet
- Lecture15 Schwarzschild2Document13 pagesLecture15 Schwarzschild2Bhat SaqibNo ratings yet
- C7.5 Lecture 16: The Schwarzschild Solution 4: Black Holes and SingularitiesDocument13 pagesC7.5 Lecture 16: The Schwarzschild Solution 4: Black Holes and SingularitiesBhat SaqibNo ratings yet
- C7.5 Lecture 12: Differential Geometry 8: More About The Curvature TensorDocument12 pagesC7.5 Lecture 12: Differential Geometry 8: More About The Curvature TensorBhat SaqibNo ratings yet
- C7.5 Lecture 14: The Schwarzschild Solution 1: The Metric and Gravitational RedshiftDocument13 pagesC7.5 Lecture 14: The Schwarzschild Solution 1: The Metric and Gravitational RedshiftBhat SaqibNo ratings yet
- GW Theory IntroDocument18 pagesGW Theory IntroBhat SaqibNo ratings yet
- Iit Jam Physics 2008Document5 pagesIit Jam Physics 2008s_adhyaNo ratings yet
- GW Theory IntroDocument18 pagesGW Theory IntroBhat SaqibNo ratings yet
- C7.5 Lecture 18: The Schwarzschild Solution 5: Black Holes, White Holes, WormholesDocument13 pagesC7.5 Lecture 18: The Schwarzschild Solution 5: Black Holes, White Holes, WormholesBhat SaqibNo ratings yet
- GR2-1. The Differential Line Element in Cartesian and Polar CoordinatesDocument19 pagesGR2-1. The Differential Line Element in Cartesian and Polar CoordinatesBhat SaqibNo ratings yet
- CCSC Coaching Centre Khanda: Physics PaperDocument3 pagesCCSC Coaching Centre Khanda: Physics PaperBhat SaqibNo ratings yet
- C7.5 Lecture 21: Cosmology 3: Cosmological Models and The Big BangDocument19 pagesC7.5 Lecture 21: Cosmology 3: Cosmological Models and The Big BangBhat SaqibNo ratings yet
- The Variational Principle in Field Theory & the Canonical Energy Momentum TensorDocument28 pagesThe Variational Principle in Field Theory & the Canonical Energy Momentum TensorBhat SaqibNo ratings yet
- Classical Field Theory: Maxwell Equations: April 28, 2010Document38 pagesClassical Field Theory: Maxwell Equations: April 28, 2010Bhat SaqibNo ratings yet
- Classical Mechanics - Sample MaterialDocument18 pagesClassical Mechanics - Sample Materialatultiwari8No ratings yet
- Physics On Curved Spaces: Kostas Kokkotas December 4, 2019Document45 pagesPhysics On Curved Spaces: Kostas Kokkotas December 4, 2019Bhat SaqibNo ratings yet
- Special RelativityDocument17 pagesSpecial RelativityDiego M GranziolNo ratings yet
- PH20029 NotesDocument71 pagesPH20029 NotesBhat SaqibNo ratings yet
- 01 - Interference of Light Jeemain - Guru PDFDocument47 pages01 - Interference of Light Jeemain - Guru PDFKazsaFahrentholdNo ratings yet
- ChromatographyDocument33 pagesChromatographyBhat SaqibNo ratings yet
- Field, Force, Energy and Momentum in Classical ElectrodynamicsDocument351 pagesField, Force, Energy and Momentum in Classical ElectrodynamicsBhat SaqibNo ratings yet
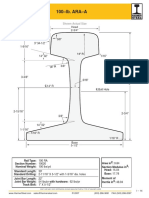
- 100 Lb-Yd ARA-ADocument1 page100 Lb-Yd ARA-ADario Bravo BordaNo ratings yet
- CH302 Assignments 2020BDocument5 pagesCH302 Assignments 2020BMike VhurinosharaNo ratings yet
- NICOLE HILL - Orbital DiagramsDocument4 pagesNICOLE HILL - Orbital DiagramsNICOLE HILLNo ratings yet
- Users-Guide PD-E-01-Operating-Instruction-PUB-5138735-000Document220 pagesUsers-Guide PD-E-01-Operating-Instruction-PUB-5138735-000siboNo ratings yet
- Fluid Mechanics Lecture Notes on Ideal FlowDocument22 pagesFluid Mechanics Lecture Notes on Ideal FlowAlsharksi AviationNo ratings yet
- GRIGNARD REAGENTS, REDUCTION & ALKANESDocument52 pagesGRIGNARD REAGENTS, REDUCTION & ALKANESPRIYANSHU KUMARNo ratings yet
- Grade 11 Chemistry Midterm Assessment TableDocument1 pageGrade 11 Chemistry Midterm Assessment TableCrisanta GanadoNo ratings yet
- How Airplanes FlyDocument15 pagesHow Airplanes Flymehul da aviatorNo ratings yet
- Numerical Analysis On Building Envelope Moisture Condensation: A Case Study Using The Glaser Diagram MethodDocument10 pagesNumerical Analysis On Building Envelope Moisture Condensation: A Case Study Using The Glaser Diagram MethodElanur MayaNo ratings yet
- 3 - Formation Pressures For Well DesignDocument20 pages3 - Formation Pressures For Well DesignSlim.BNo ratings yet
- Understanding Resonance in PhysicsDocument11 pagesUnderstanding Resonance in PhysicsArnel Palomares OrculloNo ratings yet
- Lecture Nine: Best Vision Sphere (BVS) and Stenopaeic SlitDocument24 pagesLecture Nine: Best Vision Sphere (BVS) and Stenopaeic Slithenok birukNo ratings yet
- Physics137a sp2004 mt2 Hardtke Soln PDFDocument3 pagesPhysics137a sp2004 mt2 Hardtke Soln PDFHawtShawtNo ratings yet
- Science Practice Test 1Document9 pagesScience Practice Test 1Jake Morales100% (1)
- Physics Notes Form 5Document221 pagesPhysics Notes Form 5tonikay219No ratings yet
- 5th Sem SyllabusDocument19 pages5th Sem SyllabusRaimond RosarioNo ratings yet
- Aluminum XHHW-2 600V, XLPE Insulation: ApplicationDocument1 pageAluminum XHHW-2 600V, XLPE Insulation: ApplicationJuan Rivera DuronNo ratings yet
- Instruction Manual For Mig/Mag (Co2) Welding Machine: Warpp Engineers Pvt. LTDDocument14 pagesInstruction Manual For Mig/Mag (Co2) Welding Machine: Warpp Engineers Pvt. LTDchristopher ng'ang'a kamauNo ratings yet
- V-500 Series: Enhanced Performance With Optimal ControlDocument6 pagesV-500 Series: Enhanced Performance With Optimal ControlCristobal CamposNo ratings yet
- Problem Set-02Document2 pagesProblem Set-02linn.pa.pa.khaing.2020.2021.fbNo ratings yet
- Electric Machines - Principles, Applications, and Control Schematics 2nd EditionDocument642 pagesElectric Machines - Principles, Applications, and Control Schematics 2nd EditionMirza MehanovićNo ratings yet
- Analog Servo Drive System PDFDocument6 pagesAnalog Servo Drive System PDFZeljko BorkovicNo ratings yet
- Tutorial Chapter 7Document2 pagesTutorial Chapter 7Fareez SedakaNo ratings yet
- Pros & Cons of Centralized Vacuum SystemsDocument66 pagesPros & Cons of Centralized Vacuum SystemsDjapaNo ratings yet
- R4815N1 Rectifier: FeaturesDocument2 pagesR4815N1 Rectifier: FeaturesDanny AvilésNo ratings yet
- Spincel 5 plus-URIT-5380 Service ManualDocument57 pagesSpincel 5 plus-URIT-5380 Service ManualSergey Suldin100% (5)
- PIPE AND TUBE - Comparison of SpecificationsDocument4 pagesPIPE AND TUBE - Comparison of Specificationsnate anantathatNo ratings yet
- 3500-25 Enhanced Keyphasor Module Datasheet - 141532Document8 pages3500-25 Enhanced Keyphasor Module Datasheet - 141532Erick SánchezNo ratings yet
- Los Tres ModelosDocument7 pagesLos Tres ModelosRicardo CortezNo ratings yet
- 4 Module 2 Content Sheet Part 2: Math 180 Worksheets W4Document7 pages4 Module 2 Content Sheet Part 2: Math 180 Worksheets W4Deep PrajapatiNo ratings yet