You might also like
- 4 5865984522339750213Document35 pages4 5865984522339750213Raihan MahdiNo ratings yet
- Logo Design by TubikDocument46 pagesLogo Design by Tubikrandosm100% (1)
- Big O MIT PDFDocument9 pagesBig O MIT PDFJoanNo ratings yet
- The Miller-Rabin Randomized Primality TestDocument10 pagesThe Miller-Rabin Randomized Primality TestHung Nguyen0% (1)
- Chapter 5 Algorithmic ComplexityDocument4 pagesChapter 5 Algorithmic ComplexityKhalifaNo ratings yet
- Linear Algebra AnswersDocument364 pagesLinear Algebra Answersdull_matterNo ratings yet
- RPB 115Document12 pagesRPB 115demos70No ratings yet
- DSA Unit1 2Document93 pagesDSA Unit1 2Pankaj SharmaNo ratings yet
- LP Methods.S4 Interior Point MethodsDocument17 pagesLP Methods.S4 Interior Point MethodsnkapreNo ratings yet
- Basic Derandomization TechniquesDocument18 pagesBasic Derandomization TechniquesronalduckNo ratings yet
- Lec 5Document6 pagesLec 5Abraham woldeNo ratings yet
- 1 Parallel and Distributed ComputationDocument10 pages1 Parallel and Distributed ComputationEzio AuditoreNo ratings yet
- 1 Solving Systems of Linear InequalitiesDocument4 pages1 Solving Systems of Linear InequalitiesylwNo ratings yet
- Algorithms AnalysisDocument25 pagesAlgorithms Analysislyhoangkhang831No ratings yet
- Chap 43Document18 pagesChap 43fedege9691No ratings yet
- RandomizedDocument11 pagesRandomizedRAJENDRANNo ratings yet
- MIT18 05S14 Reading2Document6 pagesMIT18 05S14 Reading2Jesha Carl JotojotNo ratings yet
- Foca FileDocument16 pagesFoca FileShaweta ThakurNo ratings yet
- Lecture 08Document11 pagesLecture 08medsharanofficialNo ratings yet
- Complexity, The Changing Minimum and Closest Pair: 1 Las Vegas and Monte Carlo AlgorithmsDocument5 pagesComplexity, The Changing Minimum and Closest Pair: 1 Las Vegas and Monte Carlo AlgorithmsVu LongBienNo ratings yet
- 4lectures Statistical PhysicsDocument37 pages4lectures Statistical Physicsdapias09No ratings yet
- Practical Implementation of Fürer's AlgorithmDocument25 pagesPractical Implementation of Fürer's AlgorithmBoppidiSrikanthNo ratings yet
- Advanced Algorithms & Data Structures: Lecturer: Karimzhan Nurlan BerlibekulyDocument31 pagesAdvanced Algorithms & Data Structures: Lecturer: Karimzhan Nurlan BerlibekulyNaski KuafniNo ratings yet
- Cs 316: Algorithms (Introduction) : SPRING 2015Document44 pagesCs 316: Algorithms (Introduction) : SPRING 2015Ahmed KhairyNo ratings yet
- Randomized Algorithms: Methods and Techniques: Kuldeep Sharma Dr. Deepak GargDocument4 pagesRandomized Algorithms: Methods and Techniques: Kuldeep Sharma Dr. Deepak GargAgus HerawanNo ratings yet
- The Similarities and Differences Between Polynomials and IntegersDocument23 pagesThe Similarities and Differences Between Polynomials and IntegersGrant AtoyanNo ratings yet
- Dian Approximate OptimizerDocument14 pagesDian Approximate Optimizertamann2004No ratings yet
- BréhierEtal 2015Document34 pagesBréhierEtal 2015ossama123456No ratings yet
- BHN Kuliah 14 - Techniques For The Design of Algorithm1Document46 pagesBHN Kuliah 14 - Techniques For The Design of Algorithm1Risky ArisandyNo ratings yet
- Asymptotic Notation ExplainedDocument112 pagesAsymptotic Notation Explained36rajnee kantNo ratings yet
- Algorithm AnalysisDocument82 pagesAlgorithm AnalysisbeenagodbinNo ratings yet
- Treaps, Verification, and String MatchingDocument6 pagesTreaps, Verification, and String MatchingGeanina BalanNo ratings yet
- Name: CS 495/MA 405: Analysis of Algorithms - Test 1 Problem 1-1: Answer: Problem 1-2: AnswerDocument6 pagesName: CS 495/MA 405: Analysis of Algorithms - Test 1 Problem 1-1: Answer: Problem 1-2: AnswerIvaj ZuckerbergNo ratings yet
- DAA Unit 1,2,3-1 (1)Document46 pagesDAA Unit 1,2,3-1 (1)abdulshahed231No ratings yet
- Other Complexity Classes and Measures: Chapter 29 of The Forthcoming CRC Handbook On Algorithms and Theory of ComputationDocument39 pagesOther Complexity Classes and Measures: Chapter 29 of The Forthcoming CRC Handbook On Algorithms and Theory of ComputationJ Luis MlsNo ratings yet
- SEM5 - ADA - RMSE - Questions Solution1Document58 pagesSEM5 - ADA - RMSE - Questions Solution1DevanshuNo ratings yet
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDocument4 pagesChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsNo ratings yet
- Numerical Analysis - Chapter3 PDFDocument22 pagesNumerical Analysis - Chapter3 PDFvmedeauNo ratings yet
- Integer Factorization Algorithms: Connelly BarnesDocument17 pagesInteger Factorization Algorithms: Connelly BarnesRubens Vilhena FonsecaNo ratings yet
- Factor IzationDocument13 pagesFactor Izationoitc85No ratings yet
- ESO211 (Data Structures and Algorithms) Lectures 1 To 3: 1 Random Access MachineDocument5 pagesESO211 (Data Structures and Algorithms) Lectures 1 To 3: 1 Random Access MachineApoorv AgarwalNo ratings yet
- Computational Complexity TheoryDocument6 pagesComputational Complexity TheoryIndra Budhi KurniawanNo ratings yet
- Biocontrol - Week 3, Lecture 1: Goals of This LectureDocument19 pagesBiocontrol - Week 3, Lecture 1: Goals of This LecturefrancoelisaNo ratings yet
- The Power of RandomnessDocument24 pagesThe Power of RandomnessdanielNo ratings yet
- Asymptotic Analysis: ObjectivesDocument20 pagesAsymptotic Analysis: ObjectivesKyle DandoyNo ratings yet
- 232ICS202 02 ComplexityAnalysisDocument46 pages232ICS202 02 ComplexityAnalysismodyzombie82No ratings yet
- PENNON—An Augmented Lagrangian Method for SDPDocument20 pagesPENNON—An Augmented Lagrangian Method for SDPMahmoudNo ratings yet
- 0.1 Worst and Best Case AnalysisDocument6 pages0.1 Worst and Best Case Analysisshashank dwivediNo ratings yet
- PRIMES is in P: Deterministic Polynomial-Time Algorithm for Primality TestingDocument9 pagesPRIMES is in P: Deterministic Polynomial-Time Algorithm for Primality Testingwoodbrent7No ratings yet
- NP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Document29 pagesNP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Aleksandr TerranovaNo ratings yet
- Algo AnalysisDocument24 pagesAlgo AnalysisAman QureshiNo ratings yet
- Lec3 PDFDocument9 pagesLec3 PDFyacp16761No ratings yet
- Mario R. Melchiori CPA Universidad Nacional Del Litoral Santa Fe - ArgentinaDocument8 pagesMario R. Melchiori CPA Universidad Nacional Del Litoral Santa Fe - ArgentinashrutigarodiaNo ratings yet
- Machine Learning - Problem Setup, Conditional Probability, MLEDocument6 pagesMachine Learning - Problem Setup, Conditional Probability, MLEtarun guptaNo ratings yet
- New index calculus algorithm achieves L(1/4 + o(1)) complexityDocument23 pagesNew index calculus algorithm achieves L(1/4 + o(1)) complexityawais04No ratings yet
- Markov Models ExplainedDocument10 pagesMarkov Models ExplainedraviNo ratings yet
- Crypto ReportDocument12 pagesCrypto ReportAC AviShekNo ratings yet
- A Singular Value Thresholding Algorithm For Matrix CompletionDocument28 pagesA Singular Value Thresholding Algorithm For Matrix CompletionphaniNo ratings yet
- Random Projections and Orthogonal Matching PursuitDocument7 pagesRandom Projections and Orthogonal Matching PursuitArindamNo ratings yet
- Factoring Algorithm Based On Parameterized Newton Method-Zhengjun Cao and Lihua LiuDocument7 pagesFactoring Algorithm Based On Parameterized Newton Method-Zhengjun Cao and Lihua LiuLuiz MattosNo ratings yet
- Research PaperDocument10 pagesResearch PaperAaron StewartNo ratings yet
- Lecture 5Document13 pagesLecture 5kostas_ntougias5453No ratings yet
- Moments and Deviations: 3.1. Markov's InequalityDocument27 pagesMoments and Deviations: 3.1. Markov's InequalityMirza AbdullaNo ratings yet
- Proof: Applying Markov's Inequality, For Any: 0 PR (1 +) PRDocument19 pagesProof: Applying Markov's Inequality, For Any: 0 PR (1 +) PRMirza AbdullaNo ratings yet
- 1 Minimum Spanning Tree (MST) : Lecture Notes CS:5360 Randomized AlgorithmsDocument9 pages1 Minimum Spanning Tree (MST) : Lecture Notes CS:5360 Randomized AlgorithmsMirza AbdullaNo ratings yet
- 2.1. Random Variables and ExpectationDocument22 pages2.1. Random Variables and ExpectationMirza AbdullaNo ratings yet
- 5.2.2. Application: Bucket Sort: 12-Feb-15 Mat-72306 Randal, Spring 2015 207Document26 pages5.2.2. Application: Bucket Sort: 12-Feb-15 Mat-72306 Randal, Spring 2015 207Mirza AbdullaNo ratings yet
- Randomized Algorithms: Prof. Tapio ElomaaDocument37 pagesRandomized Algorithms: Prof. Tapio ElomaaMirza AbdullaNo ratings yet
- 1 Markov's Inequality: Lecture Notes CS:5360 Randomized AlgorithmsDocument11 pages1 Markov's Inequality: Lecture Notes CS:5360 Randomized AlgorithmsMirza AbdullaNo ratings yet
- More Robust Hashing: Cuckoo Hashing With A Stash: Adam Kirsch Michael Mitzenmacher Udi WiederDocument25 pagesMore Robust Hashing: Cuckoo Hashing With A Stash: Adam Kirsch Michael Mitzenmacher Udi WiederMirza AbdullaNo ratings yet
- 06 RandomizedRoundingDocument6 pages06 RandomizedRoundingMirza AbdullaNo ratings yet
- 0910 RandomWalks2Document32 pages0910 RandomWalks2Mirza AbdullaNo ratings yet
- Linear Probing With 5-Independent Hashing: Lecture Notes OnDocument13 pagesLinear Probing With 5-Independent Hashing: Lecture Notes OnMirza AbdullaNo ratings yet
- 0910 RandomWalks2Document32 pages0910 RandomWalks2Mirza AbdullaNo ratings yet
- 1 Karger's Mincut Algorithm: Lecture Notes CS:5360 Randomized AlgorithmsDocument9 pages1 Karger's Mincut Algorithm: Lecture Notes CS:5360 Randomized AlgorithmsMirza AbdullaNo ratings yet
- 1 Deterministic Quicksort: Notes Cs:5360 Randomized AlgorithmsDocument5 pages1 Deterministic Quicksort: Notes Cs:5360 Randomized AlgorithmsMirza AbdullaNo ratings yet
- 05 ChernoffBounds-2019Document22 pages05 ChernoffBounds-2019Mirza AbdullaNo ratings yet
- CS5330 Week 7, 2019Document20 pagesCS5330 Week 7, 2019Mirza AbdullaNo ratings yet
- Randomized Algorithms Week 1 PuzzleDocument24 pagesRandomized Algorithms Week 1 Puzzlesidhant bansalNo ratings yet
- 03 HashingDocument21 pages03 HashingMirza AbdullaNo ratings yet
- Lower Bound On Deterministic Evaluation Algorithms For NOR Circuits - Yao's Principle For Proving Lower BoundsDocument61 pagesLower Bound On Deterministic Evaluation Algorithms For NOR Circuits - Yao's Principle For Proving Lower BoundsMirza AbdullaNo ratings yet
- Old Notes From 2018. To Be Updated After ClassDocument24 pagesOld Notes From 2018. To Be Updated After ClassMirza AbdullaNo ratings yet
- 06 FlajoletMartinDocument9 pages06 FlajoletMartinMirza AbdullaNo ratings yet
- Sublinear Algorithms: Sofya RaskhodnikovaDocument24 pagesSublinear Algorithms: Sofya RaskhodnikovaMirza AbdullaNo ratings yet
- Applications of Yao's Minimax Principle: Game Tree EvaluationDocument12 pagesApplications of Yao's Minimax Principle: Game Tree EvaluationMirza AbdullaNo ratings yet
- Skript 05Document4 pagesSkript 05Mirza AbdullaNo ratings yet
- Yao's Minimax Principle: Game Tree EvaluationDocument30 pagesYao's Minimax Principle: Game Tree EvaluationMirza AbdullaNo ratings yet
- Lect 20Document5 pagesLect 20Mirza AbdullaNo ratings yet
- Min Max GamesDocument68 pagesMin Max GamesMirza AbdullaNo ratings yet
- Lecture 2: Lower Bounds For Randomized AlgorithmsDocument10 pagesLecture 2: Lower Bounds For Randomized AlgorithmsMirza AbdullaNo ratings yet
- Lec 3Document9 pagesLec 3Mirza AbdullaNo ratings yet
- Linux Lab 03 Mounting & ViDocument1 pageLinux Lab 03 Mounting & Vismile4ever54No ratings yet
- Cloud Forum Asia BrochureDocument6 pagesCloud Forum Asia BrochuregembelkayaNo ratings yet
- Erro CtreeDocument37 pagesErro Ctreemarcianovc1189No ratings yet
- Submittal Builder: Silent Steel Framing SystemDocument6 pagesSubmittal Builder: Silent Steel Framing SystemZebNo ratings yet
- Pink Abstract Hipster Travel MagazineDocument9 pagesPink Abstract Hipster Travel MagazineMaddy EscuderoNo ratings yet
- Huawei IMS Solution Protocol ListDocument37 pagesHuawei IMS Solution Protocol Listmiladshahi100% (1)
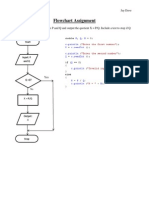
- Jay Dave Flowchart AssignmentDocument5 pagesJay Dave Flowchart Assignmentapi-225496804No ratings yet
- Navigation in SAP Systems: Introduction To Navigation in SAP Solutions On The Basis of SAP S/4HANADocument27 pagesNavigation in SAP Systems: Introduction To Navigation in SAP Solutions On The Basis of SAP S/4HANASaswat SamantarayNo ratings yet
- Index of FilesDocument62 pagesIndex of FilesPhani Pinnamaneni0% (1)
- Litwin - 2011-Technological Change at Work The Impact of EmployeeDocument28 pagesLitwin - 2011-Technological Change at Work The Impact of EmployeeCatalinMarianAlexandruNo ratings yet
- Driver Deployment Utility v2.0.0.32468 Release NotesDocument4 pagesDriver Deployment Utility v2.0.0.32468 Release NotesDaniel NituNo ratings yet
- Competitive Analysis of The VMware VRealize Cloud Management SuiteDocument37 pagesCompetitive Analysis of The VMware VRealize Cloud Management Suiteracso1000No ratings yet
- IP200 Installation User GuideDocument34 pagesIP200 Installation User GuideVodafone Business SurveillanceNo ratings yet
- Extend contract fact sheetDocument4 pagesExtend contract fact sheetFarzhell Farley EliangNo ratings yet
- Evaluate Electrical Insulation with Compact PD DetectorDocument5 pagesEvaluate Electrical Insulation with Compact PD DetectorRenato CapeliniNo ratings yet
- Kazuo Habiro and Jean-Baptiste Meilhan - On The Kontsevich Integral of Brunnian LinksDocument14 pagesKazuo Habiro and Jean-Baptiste Meilhan - On The Kontsevich Integral of Brunnian LinksGmoniconNo ratings yet
- Empanneled Hospitals As On 300718Document5 pagesEmpanneled Hospitals As On 300718PAKAM MALLESWARAMMANo ratings yet
- 2 7490 Decade CounterDocument4 pages2 7490 Decade Countervirikris100% (1)
- EC Centrifugal Fan G1G133DE1902 ENGDocument5 pagesEC Centrifugal Fan G1G133DE1902 ENGWagesusilo23121986_No ratings yet
- Analysis and design of animated film "THE STRUGGLEDocument16 pagesAnalysis and design of animated film "THE STRUGGLEAgus FROSTNo ratings yet
- Answers Student Text: UNIT 1 Decimals and FractionsDocument4 pagesAnswers Student Text: UNIT 1 Decimals and FractionsChristineNo ratings yet
- Kenandy - Salesforce ERP - Off PageDocument2 pagesKenandy - Salesforce ERP - Off PageDominic AykaraNo ratings yet
- Problem Definition: FPGA Implementation of D Flip Flop: Program CodeDocument4 pagesProblem Definition: FPGA Implementation of D Flip Flop: Program CodeDebayan BairagiNo ratings yet
- Hes Resume Cover Letter GuideDocument21 pagesHes Resume Cover Letter GuideMattia AmbrosiniNo ratings yet
- MATH042 - Lesson 8Document16 pagesMATH042 - Lesson 8Yukimura SanadaNo ratings yet
- Lab Assignment 7: Nishiv Singh (B20MT029) Google Colab Notebooks Link: Task 1Document3 pagesLab Assignment 7: Nishiv Singh (B20MT029) Google Colab Notebooks Link: Task 1Nishiv SinghNo ratings yet
- AIIMS appointment slip for orthopedics on 26 DecDocument2 pagesAIIMS appointment slip for orthopedics on 26 DecSatya NarayanNo ratings yet