You might also like
- Calm Water Resistance Prediction of A Container Ship Using Reynolds Averaged Navier Stokes Based SolverDocument6 pagesCalm Water Resistance Prediction of A Container Ship Using Reynolds Averaged Navier Stokes Based SolverShaksNo ratings yet
- Design Study and Full Scale MBS-CFD Simulation ofDocument10 pagesDesign Study and Full Scale MBS-CFD Simulation ofm1565778302No ratings yet
- Automated Marine Propeller Design Combining Hydrodynamics Models and Neural NetworksDocument10 pagesAutomated Marine Propeller Design Combining Hydrodynamics Models and Neural NetworksPoowadol NiyomkaNo ratings yet
- CFD Analysis of A Propeller Flow and Cavitation: S. Subhas Vfsaji S. Ramakrishna H. N DasDocument8 pagesCFD Analysis of A Propeller Flow and Cavitation: S. Subhas Vfsaji S. Ramakrishna H. N DasAlfa RidziNo ratings yet
- DES-based Computation of The Flow Around The Darpa SuboffDocument10 pagesDES-based Computation of The Flow Around The Darpa SuboffShahbazNo ratings yet
- Use of Commercial CFD Codes To Enhance Performance Prediction Capabilities For Planning BoatsDocument9 pagesUse of Commercial CFD Codes To Enhance Performance Prediction Capabilities For Planning Boatsgnd100No ratings yet
- 2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationsDocument10 pages2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationshenkNo ratings yet
- CFD Assessment of Ropax Hull Resistance With Various Initial Drafts and Trim AnglesDocument8 pagesCFD Assessment of Ropax Hull Resistance With Various Initial Drafts and Trim AnglesRahul SunilNo ratings yet
- Marine Propeller Design Using CFD ToolsDocument9 pagesMarine Propeller Design Using CFD ToolsadinaNo ratings yet
- Parametric Design and Optimization of High-Speed RDocument13 pagesParametric Design and Optimization of High-Speed RIszysax MediaNo ratings yet
- 03 Sname Integrated Simulation System For PropellerDocument16 pages03 Sname Integrated Simulation System For PropellerJ T Mendonça SantosNo ratings yet
- Improving CFD Ship Resistance Prediction AccuracyDocument7 pagesImproving CFD Ship Resistance Prediction AccuracyTat-Hien LeNo ratings yet
- Sjet 104 16-34Document20 pagesSjet 104 16-34Rakhi JadhavNo ratings yet
- Waverider Design and Analysis Using Computational Fluid DynamicsDocument6 pagesWaverider Design and Analysis Using Computational Fluid DynamicsabNo ratings yet
- Hull Form Improvement For SPXB Operated in Shallow Draft WaterDocument9 pagesHull Form Improvement For SPXB Operated in Shallow Draft WaterGita Marina AhadyantiNo ratings yet
- Twin Fin Concept For Cruise Ship - 2015Document68 pagesTwin Fin Concept For Cruise Ship - 2015Maurizio BernasconiNo ratings yet
- AUV Design - Shape, Drag and Practical IssuesDocument5 pagesAUV Design - Shape, Drag and Practical Issuesleiser123No ratings yet
- Asoe10016 20130930 082535 2982 38297 PDFDocument12 pagesAsoe10016 20130930 082535 2982 38297 PDFNoman KhanNo ratings yet
- PreReading L13 ESD Khorasanchi Et AlDocument10 pagesPreReading L13 ESD Khorasanchi Et AlTalish Mahmood TalishNo ratings yet
- WA2 3 HollenbachDocument9 pagesWA2 3 HollenbachMANIU RADU-GEORGIANNo ratings yet
- B16 Grapsas Epsmo05Document9 pagesB16 Grapsas Epsmo05Surjit DuttaNo ratings yet
- 22nd Chesapeake Sailing Symposium Numerical SimulationsDocument10 pages22nd Chesapeake Sailing Symposium Numerical SimulationsBillyNo ratings yet
- CFD Validation and Grid Sensitivity Studies of Full Scale Ship Self PropulsionDocument11 pagesCFD Validation and Grid Sensitivity Studies of Full Scale Ship Self PropulsionAshley KwambokaNo ratings yet
- Ship Hull Form Design and Optimization Based On CFDDocument9 pagesShip Hull Form Design and Optimization Based On CFDAshley KwambokaNo ratings yet
- Computation of An Axisymmetric Jet Using OpenfoamDocument8 pagesComputation of An Axisymmetric Jet Using OpenfoamswatiNo ratings yet
- Multiphysics Simulation For Marine Applications: CD-adapcoDocument100 pagesMultiphysics Simulation For Marine Applications: CD-adapcoesmaeil013100% (2)
- Design Methods Coupled Sail and Appendage Design Method For Multihull Based On Numerical OptimisationDocument19 pagesDesign Methods Coupled Sail and Appendage Design Method For Multihull Based On Numerical OptimisationAshik AhmedNo ratings yet
- Etude de Cas STX Coque PDFDocument8 pagesEtude de Cas STX Coque PDFGraham WestbrookNo ratings yet
- Document2 PDFDocument16 pagesDocument2 PDFFernando RodríguezNo ratings yet
- SwatchDocument8 pagesSwatchemmaNo ratings yet
- CFD and Potential Ow Assessment of The Hydrodynamics of A KitefoilDocument43 pagesCFD and Potential Ow Assessment of The Hydrodynamics of A KitefoilNguyen Quoc AnhNo ratings yet
- Development of A Free Heaving OWC Model With Non-Linear PTO InteractionDocument15 pagesDevelopment of A Free Heaving OWC Model With Non-Linear PTO InteractionPhan Ngọc QuyênNo ratings yet
- Extended AbstractDocument10 pagesExtended Abstractmac cloudNo ratings yet
- Badoe Simman2014Document8 pagesBadoe Simman2014Prasad PatilNo ratings yet
- Comparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionDocument8 pagesComparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionKariem ZakiNo ratings yet
- 3D CFD Analysis of Multi-MW Wind Turbine PerformanceDocument14 pages3D CFD Analysis of Multi-MW Wind Turbine PerformancesurichiNo ratings yet
- (Scientific Proceedings Faculty of Mechanical Engineering) Preliminary Computational Fluid Dynamics (CFD) Simulation of EIIB Push Barge in Shallow WaterDocument7 pages(Scientific Proceedings Faculty of Mechanical Engineering) Preliminary Computational Fluid Dynamics (CFD) Simulation of EIIB Push Barge in Shallow WaterMohammed AttiaNo ratings yet
- Paper23109 113Document5 pagesPaper23109 113rogerNo ratings yet
- Analysis of The Behaviour of A 3600 TEU Container Ship and Her Propeller Using ANSYS CFXDocument8 pagesAnalysis of The Behaviour of A 3600 TEU Container Ship and Her Propeller Using ANSYS CFXSADULLAHNo ratings yet
- Sun, J. 2012. Hull Form DesignDocument10 pagesSun, J. 2012. Hull Form DesignManuel Esteban MercadoNo ratings yet
- On The Strength Assessment of A Small Liquid Petroleum Gas Carrier in Oblique Waves by 1D and 3D-FEM AnalysesDocument16 pagesOn The Strength Assessment of A Small Liquid Petroleum Gas Carrier in Oblique Waves by 1D and 3D-FEM AnalysesAlina NastasaNo ratings yet
- Numerical Simulations of The Hydrodynamic PerformaDocument18 pagesNumerical Simulations of The Hydrodynamic Performaمجتبی فرامرزیNo ratings yet
- Viscous Drag Calculations For Ship Hull Geometry: 1.0 AbstractDocument10 pagesViscous Drag Calculations For Ship Hull Geometry: 1.0 AbstractIsaac KocherlaNo ratings yet
- A Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisDocument7 pagesA Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisSalma SherbazNo ratings yet
- 1 s2.0 S2092678216305118 MainDocument10 pages1 s2.0 S2092678216305118 MainDhanang Reza PradicaNo ratings yet
- Modification and Analysis of Twin Screw Ship SternDocument13 pagesModification and Analysis of Twin Screw Ship SternMaciej ReichelNo ratings yet
- Ocean Engineering: K. Niklas, H. PruszkoDocument13 pagesOcean Engineering: K. Niklas, H. PruszkoAnthony MarineNo ratings yet
- FSI PaperDocument10 pagesFSI PaperHasan AdelNo ratings yet
- Hull Form Twin Skeg OptimizationDocument13 pagesHull Form Twin Skeg OptimizationLuis Angel ZorrillaNo ratings yet
- Aero-Structural Blade Design of A High-Power Wind Turbine: Bruno M. Tojo and Andr e C. MartaDocument14 pagesAero-Structural Blade Design of A High-Power Wind Turbine: Bruno M. Tojo and Andr e C. MartaMIGUEL ANGEL DURON SAAVEDRANo ratings yet
- Development of A CFD Model For Propeller Simulation: Lodz University of TechnologyDocument16 pagesDevelopment of A CFD Model For Propeller Simulation: Lodz University of TechnologyAlfian ArfahNo ratings yet
- Design Study of Podded Propulsion System For Naval ShipDocument8 pagesDesign Study of Podded Propulsion System For Naval Shippal_malayNo ratings yet
- Contrllable-Pitch Propeller ModelDocument16 pagesContrllable-Pitch Propeller Modelalfborbr100% (1)
- KCS - CTDocument8 pagesKCS - CTakıle neseNo ratings yet
- J Energy 2019 07 091Document16 pagesJ Energy 2019 07 091teguh syafmedioNo ratings yet
- Small-Craft Power PredictionsDocument33 pagesSmall-Craft Power PredictionsbourneremembersNo ratings yet
- Aiaa Les Moin-SquarebackDocument9 pagesAiaa Les Moin-SquarebackPrateek JaiswalNo ratings yet
- Timedomain Aeroelastic Analysis of Agard 4456 WingDocument5 pagesTimedomain Aeroelastic Analysis of Agard 4456 WingHassanNo ratings yet
- 3-IMO A206 Wheel House Poster PDFDocument1 page3-IMO A206 Wheel House Poster PDFKostyantinBondarenkoNo ratings yet
- A910 22 English VersionDocument20 pagesA910 22 English VersionWing WingNo ratings yet
- A910 22 English VersionDocument20 pagesA910 22 English VersionWing WingNo ratings yet
- 3-IMO A206 Wheel House Poster PDFDocument1 page3-IMO A206 Wheel House Poster PDFKostyantinBondarenkoNo ratings yet
- NASA Research Summarizes Wing Section Characteristics at Subcritical SpeedsDocument17 pagesNASA Research Summarizes Wing Section Characteristics at Subcritical SpeedsciksunNo ratings yet
- GAS Carriers L Z 75,000 CBM (Part 2) : Tenaga SatuDocument5 pagesGAS Carriers L Z 75,000 CBM (Part 2) : Tenaga SatuciksunNo ratings yet
- Im and SEO 2010 Ship Manoeuvring Performance Experiments Using A Free Running Model ShipDocument5 pagesIm and SEO 2010 Ship Manoeuvring Performance Experiments Using A Free Running Model ShipciksunNo ratings yet
- Propellers. Inboard Propellers and Speed Calculation Marine Engines 2.1L 16LDocument28 pagesPropellers. Inboard Propellers and Speed Calculation Marine Engines 2.1L 16Lanon_844391780100% (1)
- Propellers. Inboard Propellers and Speed Calculation Marine Engines 2.1L 16LDocument28 pagesPropellers. Inboard Propellers and Speed Calculation Marine Engines 2.1L 16Lanon_844391780100% (1)
- Chi 2006Document4 pagesChi 2006ciksunNo ratings yet
- Presentations of Resistance and Propulsion DataDocument28 pagesPresentations of Resistance and Propulsion DataciksunNo ratings yet
- Fu Kuba 1996Document7 pagesFu Kuba 1996ciksunNo ratings yet
- Engineering Bernoulli Equation PDFDocument19 pagesEngineering Bernoulli Equation PDFkhairul hisyamNo ratings yet
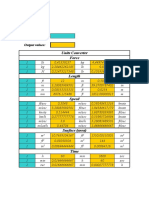
- Input Values: Output Values:: Units Converter ForceDocument5 pagesInput Values: Output Values:: Units Converter ForceJeyder GeorgeNo ratings yet
- Dosing Pumps GuideDocument11 pagesDosing Pumps GuideBilal AhmadNo ratings yet
- Flow and Pressure Control ValvesDocument9 pagesFlow and Pressure Control ValvesMaryland SalcedoNo ratings yet
- Heat Transfer Experiment #1Document17 pagesHeat Transfer Experiment #1Yana UyoiNo ratings yet
- Effect of Hydraulic Accumulator On The System Parameters of An Open Loop Transmission SystemDocument5 pagesEffect of Hydraulic Accumulator On The System Parameters of An Open Loop Transmission SystemAshutosh DongarwarNo ratings yet
- Bernoulli Eqn Waste Water LabDocument10 pagesBernoulli Eqn Waste Water LabMuhamad IzzanNo ratings yet
- 4th Sem Hydraulic MICROPROJECTDocument16 pages4th Sem Hydraulic MICROPROJECTOmkar Jambhale100% (1)
- Friction Factor For Turbulent Pipe FlowDocument16 pagesFriction Factor For Turbulent Pipe Flowyu won hoNo ratings yet
- 100 Basic Mechanical Engineering Interview Questions Answers PDF Basic Mechanical Engineering Interview Questions Answers PDFDocument9 pages100 Basic Mechanical Engineering Interview Questions Answers PDF Basic Mechanical Engineering Interview Questions Answers PDFRahulBharti100% (1)
- Duns and Ros (1966) two-phase flow correlationsDocument4 pagesDuns and Ros (1966) two-phase flow correlationsJuan BloqNo ratings yet
- Report 4 Fluid Lab 22Document20 pagesReport 4 Fluid Lab 22Mariam DalloulNo ratings yet
- 06 WSP-1Document12 pages06 WSP-1tienNo ratings yet
- Drag ForceDocument7 pagesDrag ForceehsankotNo ratings yet
- The Rolling Up of The Trailing Vortex Sheet and Its Effect On The Downwash Behind WingsDocument13 pagesThe Rolling Up of The Trailing Vortex Sheet and Its Effect On The Downwash Behind WingsDanildoNo ratings yet
- Hydraulics Uniform Flow Open ChannelDocument74 pagesHydraulics Uniform Flow Open ChannelAnep Ameer0% (1)
- Chapter 8 - Natural ConvectionDocument23 pagesChapter 8 - Natural ConvectionFrancis5801No ratings yet
- Compressible FlowDocument59 pagesCompressible FlowJanuarSianipar100% (2)
- E.E 204 Hydrostatic Problems SolutionsDocument2 pagesE.E 204 Hydrostatic Problems SolutionsMohammed Amin100% (1)
- Valve List TemplateDocument10 pagesValve List Templateeke230% (1)
- Offshore Dynamic ResponsesDocument36 pagesOffshore Dynamic ResponsesnikhilNo ratings yet
- IV Mech Me3492 H&P Unit IDocument56 pagesIV Mech Me3492 H&P Unit Irakeshsakthi003No ratings yet
- Capillarity:: Expression of Capillary RiseDocument3 pagesCapillarity:: Expression of Capillary RiseVivek KarthikNo ratings yet
- Mae 5130: Viscous Flows: Lecture 3: Kinematic PropertiesDocument23 pagesMae 5130: Viscous Flows: Lecture 3: Kinematic Propertiesriteish singhNo ratings yet
- Flow Experiment Determines Discharge CoefficientsDocument15 pagesFlow Experiment Determines Discharge CoefficientsLai YenNo ratings yet
- Effective Viscosity Prediction of Crude Oil-Water Mixtures With High Water FractionDocument11 pagesEffective Viscosity Prediction of Crude Oil-Water Mixtures With High Water FractionVanessa RiosNo ratings yet
- The Venturi and Nozzle PDFDocument8 pagesThe Venturi and Nozzle PDFlumengentiunNo ratings yet
- Section 5: Finite Volume Methods For The Navier Stokes EquationsDocument27 pagesSection 5: Finite Volume Methods For The Navier Stokes EquationsUmutcanNo ratings yet
- Introduction to Wonji Shoa Sugar Factory Pump ClassificationsDocument27 pagesIntroduction to Wonji Shoa Sugar Factory Pump ClassificationssenaNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (50)
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 2.5 out of 5 stars2.5/5 (3)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationFrom EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationRating: 1 out of 5 stars1/5 (1)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsFrom EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNo ratings yet
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideFrom Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideRating: 3.5 out of 5 stars3.5/5 (7)
- Waves and Beaches: The Powerful Dynamics of Sea and CoastFrom EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastRating: 4 out of 5 stars4/5 (1)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeFrom EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeRating: 3.5 out of 5 stars3.5/5 (4)
- Basic Alarm Electronics: Toolbox Guides for Security TechniciansFrom EverandBasic Alarm Electronics: Toolbox Guides for Security TechniciansJohn SangerRating: 4 out of 5 stars4/5 (1)