Improved Method for Determining the Remaining
Useful Life of a Component
Eric Bechhoefer Lei Xiao Xinghui Zhang
GPMS Int. Inc Donghua University Intelligent Mobile Robot Research
Cornwall, VT USA Shanghai, China Institute (Zhongshan)
eric@gpms-vt.com leixiao211@dhu.edu.cn Beijing, China
dynamicbnt@163.com
Abstract—High value asset vehicles, or vehicles where The growth of fatigue cracks has been studied extensively
safety/operational readiness is important, can greatly benefit from [6] and several models have been developed to explain high
an accurate remaining useful life (RUL) estimate. For these assets, cycle fatigue degradation. As reported in [5], crack growth can
RUL allows operators to realize revenue because of improved be modeled as a linear elastics fracture where the crack surface
availability. This paper uses an improved hybrid, high cycle is forced directly apart. This is known as an opening mode
fracture mechanics model to more accurately estimate the RUL. (Mode 1) failure model.
The hybrid method’s performance is validated using trendability
and monotonicity against two existing models using a real-world In a Mode 2 failure model, the crack surfaces move normal
data set. The improved model allows a longer time period to to the crack from and remain in the crack plane. Head’s theory
marshal the resources needed for repair or give operations is one such model that used this failure mode. Finally, if the
personnel an extended window to bring other assets to cover crack surface moves parallel to the crack as it forms and remains
missions that would otherwise be unavailable. in the crack plain, this is a Mode 3 failure. One such modeling
Keywords-RUL; PHM; Condition Monitoring; High Cycle
using this process is Dislocation theory [5].
Fatigue In “Contending Remaining Useful Life Algorithms” [9], the
authors explored RUL algorithms based on Mode 1, 2 and 3
I. INTRODUCTION failure models. While no model was perfect in its estimation, the
Often the true cost of unscheduled maintenance is not the data suggested that the actual degradation mode was a
repair cost of the asset, but the opportunity cost. Opportunity combination of Mode 1 and Mode 3 fatigue failure. It is
cost is the lost revenue or ability to perform a mission because hypothesized that because of the components often have
the asset is not available. While condition-based maintenance complex shapes, as gears/bearings, the component suffers
practices can often improve readiness and safety, it may not fatigue damage as a combination of modes. Hence, it is proposed
address the need for a prognostic. A prognostic capability that fatigue failure is a combination of Mode 1 and Mode 3
estimates the remaining useful life (RUL) of a monitoring damage. Furthermore, a combined, hybrid model would
component. The ability to inform an operator of an asset’s RUL facilitate a better prediction of crack growth. This, in turn, allows
allows the operator to order long lead time parts, schedule the for an improved estimate of the RUL.
asset for maintenance, and have available the skill set requires to
restore the assets’ damaged component to service. This then The other improvement is observation that while crack
allows the asset to be availability to generate revenue as opposed growth is nonlinear (e.g., the rate of change of a crack length
to being down some indefinite time for maintenance. This grows faster as the crack length increases), the RUL is linear.
proactive maintenance policy reduces the opportunity cost of That is, for any given load, the RUL rate of change (dRUL/dt) is
unscheduled maintenance by shifting it into scheduled always -1. For example, if the life of a component is given as
maintenance. 100 hours, after one hour of usage, the life should logically be
99 hours. This seemingly obvious observation can be used
While several RUL techniques have been reported, this mathematically to improve the estimate of the RUL calculation
proposed new algorithm improves upon exiting, model-based as it is an extra observable when using state reconstruction
RUL methods. The term improvement implies that the estimate algorithms.
of RUL is more consistently accurate over time (monotonicity
and trendability). This improvement was achieved using two II. BACKGROUND OF THE IMPROVEMENT
novel ideas. Commercially, there are several applications of condition
The first improvement is the realization that fatigue damage, monitoring where the estimate of RUL would be beneficial. For
such as spalling of a bearing, gear tooth root bending, or shaft example, in the wind power generation industry, condition
coupling failure, could result from a combination of degradation monitoring allows better balance of plant, and optimization of
modes. resources. The opportunity cost is the lost revenue when the
machine is down. When a wind turbine fails, because of the cost
of the crane for major maintenance, knowing the RUL of a
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
number of machines allows the operator to better schedule the
crane. As opposed to marshalling a crane four times to repair
four different wind turbines, if the RUL of four wind turbines is
known and its likely repair is needed in the next month, then the
crane is marshaled once and maintenance is conducted on all
four wind turbines, save cost.
Alternatively, in the aviation market, health and usage
monitoring systems (HUMS) have been developed to enhance
reliability and safety. While HUMS provides condition
monitoring support of the drivetrain, it typically supports engine
performance evaluation, fleet optimization quality assurance
(FOQA, which evaluates how the aircraft is flown) and RTB
(rotor track and balance, which is a common maintenance
requirement for helicopters).
Figure 1. Trending Upper Mast Ball Bearing with RUL of 53 Hours
Helicopters generate revenue only when they are performing
a mission. Hence there is a large opportunity cost associated with III.REQUIREMENTS FOR PROGNSTOICS AND RUL
down time. Many helicopter missions are also critical – such as ESTIMATION
firefighting or air ambulance services. As such, the operator may
A prognostic requires four data input to estimate a RUL:
pay a penalty when unable to meet a commitment.
1. The current health of the component,
The way aircraft and helicopters are operated is well suited
to exploiting the information that an RUL provides. Aviation 2. A threshold for the component health that indicates
assets in general, are maintenance intensive, requiring periodic when it is necessary to do a corrective maintenance
maintenance every 50 to 100 hours of flight time. Heavier action,
maintenance actions occur annually. Many commercial
operators achieve 500 to 800 hours of flight per year, or 30 to 60 3. Some metric of the predicted load that component
hours of flight time per month. It is rare for helicopter operators will see,
to achieve over 800 hours of annual flight time. 4. A model of the crack propagation or degradation
Hence, with a RUL capability of 70 to 100 hours, the model that takes the health of the component, and
opportunistic maintenance planning horizon is then one to two the predicted load to estimate the time until
months. Operators with accurate RUL can then ensure that the corrective maintenance is required.
right personnel, tools, and parts on hand to performance the HUMS and other condition monitoring systems are designed
maintenance. For example, Fig. 1. shows a trending upper mast to support drivetrain diagnostics. Most HUMS have several
ball bearing fault. The RUL recommends maintenance to be accelerometers used to acquire vibration, which is sampled
performed in 50 hours, although it has been trending for over the synchronously with a tachometer input. The tachometer zero
100 hours. The maintainer understands the bearing needed to be crossing data, along with configuration (such as the ratio from
replaced, but decided to wait until an annual inspection, which the tachometer to the shaft under analysis, the number of teeth
will occur in the near future. on a gear associated with that shaft and bearing fault data
frequency) allow the calculation of condition indicators. These
HUMS was mandated for Type 29 (heavy) helicopter
market, for over water transport. Here, condition monitoring is a condition indicators (CIs) represent features associated with
safety of flight concern as the helicopter can have long transit faults. For example, the residual kurtosis of the time
over water. In general, the light utility helicopter (Type 27 synchronous average increases linearly with the reduction is
aircraft) does not have over water transits, so HUMS is not a stiffness associated with a cracked tooth. See Vercer [1] for a
safety of flight concern. Instead, HUMS allows for reduced more detailed explanation of various condition indicator
unscheduled maintenance, an improved sense of safety, and algorithms.
improved readiness. To determine if maintenance is required or appropriate, an
For the upper mast ball fault (Fig. 1), the consequence of not evaluation is made with the calculated CIs for a given
doing maintenance is a chip light indicator. This would require component. In some systems this may be treated as a
the pilot to land as soon as practicable. After landing (which may classification problem. That is, machine learning or some
be a parking lot or convenient field) the pilot would inspect the artificial neural network (ANN) application classifies the
chip plug for the size of the metal debris. If large, the pilot would component, based on the CIs as nominal or damage.
perform a 30-minute power run and again inspect the plug. If the This methodology is not necessarily well suited to this
plug had more debris or chip light on the test run, the aircraft is application, as the fault detection problem is asymmetric. That
pulled from service. This then requires an inspection of the is, it is easy to get nominal data, but fault data is rare, expensive
gearbox, replacement of the faulted part and loss of revenue for and in general, not available. Consider, for example, the M250
perhaps a month. In this example, replacing the bearing C47 engine that is on the Bell 407. The power turbine side the
proactively to avoid unscheduled maintenance greatly reduced engine gearbox, has five shafts, which with three or more failure
cost. modes. There are six gears (with six failure modes) and thirteen
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
bearings (four failure modes) for a total or 5 × 3 + 6 × 6 + 12 of a fielded system will be what was designed. Consider the
× 4, or a total of 99 test conditions. Each of these engines cost thought experiment where the HI is the sum of two CIs (X and
roughly three-quarters of a million dollars. There is simple no Y) that are Gaussian with s = 1. Then the standard deviation of
way to empirically collect a representative dataset to test all X+Y is:
these test cases.
𝜎"#$ = $𝜎"! + 𝜎$! + 2𝜌𝜎" 𝜎$ (2)
However, a typical condition monitoring system can collect
10 to 20 acquisitions per hour. In a short operating period, the Here r is the correction between X and Y. If the correlation
probability distributions of the CIs can be well characterized. is near 0, the standard deviation is sqrt(2). However, if the
With such data, a formal hypothesis test can be implemented. correlation is nonzero (or worst case near 1) the standard
That is, the CIs are used to reject hypothesis that the components deviation is 2. Hence, the observed PFA (which is based on the
are nominal. Of course, for the performance of the hypothesis HI standard deviation) of the HUMS when the data is correlated
test to be valid (as measured by false alarm rate (Type I error) or with will be much higher than designed. This would result in
missed detection (Type II error)), the underlying assumptions of needless maintenance.
the test must be correct [2,3]. A whitening transform can be constructed using the
Cholesky decomposition of the inverse covariance matrix. This
IV. THRESHOLD SETTING USING HYPOTHSIS TESTING is in effect the square root of the covariance (i.e., standard
Consider that one of the most common condition indicators deviation). When multiply this by the measured vector of CIs
is magnitude derived from a Fourier Transform for some give (e.g., designated as CI), it will produce the identical and
frequency (such as shaft rate or bearing fault feature). For a independent conditions needed by the HI algorithm. The whiting
Gaussian signal, it can be shown that the distribution of the CI is transform is:
Rayleigh [2]. Note that the Rayleigh distributions mean value
and variance are: 𝑳𝑳𝑻 = 𝚺&𝟏 (3)
𝜇 = 𝛽$𝜋⁄2 , 𝜎 ! = (2 − 𝜋⁄2)𝛽! (1) where S is the sample covariance of the CIs used for the HI
algorithm. The HI algorithm become:
This is useful, as it shows that for nominal components, the
spectrum should be Rayleigh. Note that both the mean value and 𝐻𝐼 = 𝑠𝑐𝑎𝑙𝑒⁄𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 √𝑪𝑰𝑻 𝑳𝑳𝑻 𝑪𝑰 (4)
variance share the term b, and that the PDF can be described It can be show [3] that the distribution the HI in (4) is a
solely by this value b. Hence as the component degrades, as Nakagami distribution. The critical value is set by using the
measured by an increasing mean value or variance, there will be inverse cumulative probability function (ICPF). The ICPF
evidence to reject the null hypothesis that the component is requires a probability of false alarm. Usually, this is taken to be
healthy. small, such as 1e-6. Additionally, it requires the descriptive
As we noted, there are several different failure modes for any statistics for the Nakagami (h, w) where h is the n, number of
give components. It is also the case that not ever CI is sensitive CIs used in the HI algorithm and:
to each failure mode. For example, a bearing will have a cage, 𝜔 = 2𝑛⁄(2 − 𝜋⁄2) (5)
ball (roller element), inner race or outer race fault. To evaluate
the condition of the bearing, these four CIs would be needed to The scale value is used to define the HI value when the
evaluate the component health. Hence, from the perspective of component is deemed no longer nominal. That is, if the scale
the prognostic architecture, there is a choice. Should an RUL be value is 0.35, the component is identified at damaged. For a HI
estimated for each CI, or should the CIs be fused into a health using four CIs, the critical value for a PFA of 1e-6 is: 9.9744.
indicator (HI).
V. RUL CALCULATION
In the case of a CI approach to RUL, each CI is propagated The RUL will be defined at the time from the current HI
forward in time to calculate its RUL. The component CI is then value from (4), until the HI meets some upper threshold level.
the minimum of all the calculated RUL. This increases the This level represents damage where it is appropriate to do
computation burden and from a display perspective is not ideal maintenance. For aviation, and most application where the
– its far easier to calculate one HI and generate one RUL which desire is to optimize operational readiness, the RUL does not
is assigned directly to the component. represent the time of failure. The RUL is simply the time where
In using the HI approach, we can control the false alarm rate to not perform maintenance significantly reduces the reliability
by observing the HI is a function of the CIs distribution. This of the system. This paradigm ensures the continued safety and
will only be true if the CIs are independent (no correlation) and availability of the asset and supports existing maintenance task.
identical distributions (a term call IID). As we can show that Consider how the OEM develops a scheduled maintenance
many of the CIs are nearly Rayleigh (or can be transformed to interval. By analysis of the expected loads, the OEM determines
be Rayleigh), the issues resolve to making each Rayleigh CI both an inspection interval that should catch any propagating fault
identical and independent. By dividing by the CIs standard prior to the next inspection. Essentially, the interval is chosen
deviation, b will be: 1.5264 = 1⁄$2 − 𝜋⁄2. Hence, this is a such that the total system reliability remains high. For aviation,
method to make the CIs identical. the original equipment manufacturer (OEM) designs the
components to a reliability of “6-9s”, or that the probability of a
The process of removing correlation between CIs is known
as whitening. Whiting ensures that the realized false alarm rate component failure is less than 1e-6 per flight hour.
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
Condition monitoring can then be thought of as a virtual By taking the crack length a as the current measured value
inspection. The RUL is then estimating when a virtual inspection ao, and using estimating of the inverse crack growth rate (dN/da),
would require maintenance. Hence, an RUL triggered the constants cancel out, leaving the number of cycles:
maintenance event results in the repair of a damaged component +-
!
and restores the system to the OEM’s design reliability. From 𝑎 − 𝑎/ Q𝑎. ⁄𝑎/ R
the perspective of the maintainer, then: 𝑁 = −𝑑𝑁P𝑑𝑎 . N𝑚 (9)
P2 − 1
• The HI has a low probability of false alarm, and when Substituting the crack growth exponent as 4 (common for
the HI is greater than scale (in this example, 0.35), the steal) the estimate of the number of cycles for the RUL is:
component is no longer nominal.
𝑎
• When the HI is greater the 0.75 (e.g., Warning), it is 𝑁 = −𝑑𝑁P𝑑𝑎 × 𝑎. × 𝑙𝑛 I /P𝑎. K (10)
highly likely that the component is damaged, and the As most machines operate at a constant RPM, N is then
maintainer should schedule maintenance. proportional to time. We have no direct observation of crack
• The RUL is the time from the current HI value to a value length on the component, so one uses the HI (based on the CIs)
of 1. The HI is greater than 1, the component is in Alarm as a surrogate for crack length. Hence, it is assumed that the
and maintenance should be initiated. component health (the HI) is proportional to damage, such that
(10) defines the RUL estimate where the current HI replaces ao,
• For an HI of one, the component shows physical and 1 replaces af.
damage, but is not at risk of catastrophic failure.
From (6), we see that the crack growth rate is a function of
From numerous run-to-failure experiments, we have found gross strain. Higher cyclic strain accelerates the rate of crack
that bearings typically fail catastrophically with HI values growth. However, during the integration of (8), the terms for
between 10 and 20, whereas a gear failure occurs at an HI of 3 strain cancel out, implying the gross training between
to 5. It is important to note that an HI of 1 does not indicate subsequent measurement of a0 is the same. Load will vary with
failure. Failure for many assets is life threatening or causes time, but on average will be similar. However, it’s clear that as
added expense due to collateral damage. Instead, the HI load/usage increase, it will affect (5) resulting in a shorter RUL.
threshold of 1 is a balance between maximizing the usage of the To model more aggressive loads to estimate, say, a worst case
component while reducing the risk of collateral damage and/or bound on RUL, apply a correction of -dN/da × 1.10 in (10).
failure under operation. Performing maintenance when the HI is
1 restore the reliability of the system to the OEM designed. B. Fatique Crack Propogation using The Dislocation Theory
Model
Hence, the RUL is the define as the estimated time from the
measured HI until the HI is 1. If crack propagation is driven by anti-plane strain, the this is
a Mode 3 failure. In this case, the crack tip is represented as an
A. Fatique Crack Propogation using The Linear Elastic array of small dislocation on the component’s plane, which are
Model continuously distributed. The rate of change in the crack growth
Assuming a Mode 1 fatigue crack model undergoing tensile is then a function of the accumulated plastic strain at the crack
cyclic loading of less than 30% of yield, the rate of change of the tip. When the strain exceeds this critical value, the crack
crack length (2a), is shown to be: propagates. The change in crack length per stress cycle is then:
() () )# 0$%&
'
= 𝐷(Δ𝐾)+ (6) (*
= 120 (
(11)
(*
where
While similar to (9), it is noted that the crack growth exponent
• The rate of change of the half crack length per cycle is is the Dislocation Theory is 2 vs. 4. Inverting, integrating, and
da/dN, changing terms gives:
• D is a material constant 𝑁 = −𝑑𝑁P𝑑𝑎 × 𝑎. × Q2𝑎/ − 2$𝑎. R (12)
• DK is the gross stain (s corrected by a shape factor a) C. The Combined Mode Fracture Mechanics Model
• m is the crack growth exponent, typically 4. Equations
We will use the health paradigm where the RUL is the time
Substituting DK into (6) gives: from the current health to and health of 1. As noted, in [9]. Then,
() ,- + +- by assuming that the fatigue failure is a combination of fracture
(*
= 𝐷 I2𝜎(𝜋) ! 𝛼K 𝑎 ! (7) modes 1 and 3, we can combine (10) and (12) to give a fracture
Inverting and integrating to get the number of cycles, N is: mechanics model as:
&+- 𝑁 = −𝑑𝑁P𝑑𝑎 × 𝑎. × Q−2 + 2$𝑎. R (13)
𝑁 = ∫) ! 𝑎
) !
N , + 𝑑𝑎 (8)
"
𝐷 I2𝜎(𝜋) -! 𝛼K Note that in the mechanization of a solution, a0 is the current
health (HI), and dN/da is the inverse derivative of HI (e.g.,
dHI/dt). Hence, the calculation of the derivate is an essential part
of solving for the RUL. Without loss of generality, an unbiased
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
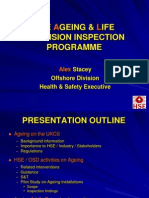
estimate of the HI and dHI/dt can be calculated with a Kalman hours. Here it is seen that the hybrid model compares favorably
filter or other State Observer for linear systems. with the existing models. We can quantify the accuracy by
looking at the mean and standard deviation of the error between
D. Calculation of RUL with Two Inputs each model and the ideal RUL. The ideal RUL decreases by 1
Past mechanization of RUL has used state observer (for for each hour of usage.
example, Kalman Filter, or Alpha-Beta-Gama filter) to give an
unbiased estimate or RUL (e.g., N in (13)), and its first and Zooming into the shorter time period (from -300 to -50
second derivative. This innovation expands the measurement hours), the hybrid model performs better than the other
matrix to include inputs for the RUL and uses -1 as the RUL conventional models.
derivative as input. As noted, this extra input, which has not been
reported in earlier works, allows a second input to improve the 50
Error Linear Elastic
observability of the state observer. 40
Error Dislocation
Hybrid Error with -1dRUL/dt
30
20
RUL (Hours)
10
-10
-20
-30
-40
-300 -250 -200 -150 -100 -50
Error (Hours)
Figure 4. Residual Error of the RUL Models
VI. RUL PERFORMANCE
Figure 2. Process flow of RUL Estimation
One measure of accuracy performance is to measure the
mean error and standard deviation of error over the period of
Combining the improved RUL model using a combination
time. Here we see that the (Table I) that both the mean and
(e.g., hybrid model) of fracture mechanics models and the use of
standard error of the RUL is lowest for the hybrid model.
a second RUL observable as -1 for dRUL/dt significantly
improve the accuracy of the prediction. Figure 3 shows a TABLE I. STATISTICAL COMPARISON OF THREE MODELS
comparison of models.
Model Mean Error StD of Error
1000
RUL Linear Elastic
RUL Dislocation
Linear Elastic Model 2.44 hours 18.22 hours
900 Hybrid RUL with -1dRUL/dt
Ideal
Dislocation Model -11.68 hours 14.00 hours
800
700
Hybrid Model -1.96 hours 10.72 hours
600 This simplified performance metric does not adequately
Estimate RUL
500
capture the dynamics and complexity of the propagation of the
RUL over time. Therefore, a more satisfactory metric was given
400
in [8], where Dr. Coble introduces the concept of monotonicity
300 and trendability as RUL performance metrics.
200 Monotonicity is usually adopted to state the underlying
100
positive or negative trend of a series of health indicators. It is
also used to evaluate the fitness of the extracted health indicator
for RUL prediction. In [8], monotonicity can be measured given
0
-700 -600 -500 -400 -300 -200 -100 0
Remaining Useful Life (Hours)
by
Figure 3. Comparison of RUL Model.
æ h+ h- ö
I monotonicity =mean ç indicator - indicator ÷
Note that on this fault, which is a high-speed bearing, both è n -1 n -1 ø
(14)
the Linear Elastic and Dislocation models overshot ideal RUL
from -600 to -300 hours. The hybrid model is much closer to the Where n is the number of observations in a particular
ideal RUL. This is due to the extra observable input of -1 for history, the monotonicity of a series of RUL is given by the
dRUL/dt. Figure 4 compares the performance from -300 to 50
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
average difference of the fraction of positive (h+indicator) and
negative (h-indicator) derivatives for each RUL estimate.
Alternatively, trendability is defined to indicate the degree
to which a series of RUL have the same underlying shape and
can be described by the same functional form. In [8], trendability
is given by the smallest linear correlation across a series RUL
series as,
I trendability = min ( rcorrcoef ) (15)
Initially, trendability was characterized by comparing the
fraction of positive first and second derivatives in a series of
health indicators. It should have a different functional form
compared with (14). Even though (15) is an available measure
of trendability, it cannot form the trend over the time horizon of
the RUL, as the RUL prediction is a time-series regression
problem. In consideration of the trendability meaning, a new
measure for trendability is proposed in this paper as, Figure 5. Trendability of Contending RUL Models
-
N i*
H tw - H twj* Presented is a physics-based modeling of a high fatigue
I trendability = remaining useful life (RUL) algorithm. This model-based
N TW (16) approach has the advantage of not needing extensive training
where TW means the size of a given time window. is the Hi*TW from exemplars/fault data sets, as it is based on the relationship
average value of RUL in the ith time window. Hi*TW is then the processes noise of a nominal component and the rate of change
corresponding values in the adjacent time window. NTW indicates of component over time. Three models were compared: the
the total number of time windows. The numerator in (16) linear elastic model, a dislocation theory-based model, and a
indicates the number of negative values from the comparison of hybrid model, which combines both the linear elastics and
average health indicators in each two adjacent time windows dislocation model. It was hypothesized that due to the complex
among NTW. shape of the component (e.g., a gears/bearing) that fractures due
to fatigue may have multiple propagation modes (Mode 1 and
The performance metrics (namely, monotonicity and Mode 3). Further, it was hypothesized that the rate of change of
trendability) compare the three different RUL extracted from the RUL should be -1 (e.g., the RUL decrements by one hour for
different models. The results are listed in Table 2. Here we see each hour of life that is consumed). Using accuracy,
that the monotonicity and trendability from the hybrid method monotonicity and trendability as metrics, the performance of
show better performance than the linear elastic or dislocation these models was compared.
methods. This is because the hybrid method can obtain greater
values of monotonicity and trendability, which means the RUL In summary, the hybrid model (combination of the linear
from the hybrid method is more monotonic and trendable, and elastic and dislocation theory models, with a secondary
hence, higher accuracy. observable) gives a much better estimate of RUL as the fault
initially propagates. Furthermore, as the RUL decreases, the
Table II. compares the RUL performance (monotonicity extra observable reduces the standard deviation of the RUL
and trendability) of different models estimate over other models and improves both the monotonicity
and trendability of the RUL. This improved estimate and
TABLE II. TABLE 1 COMPARISON OF MONOTONICITY AND reduced variance allow maintainer and operators to schedule
TRENDABILITY OF DIFFERENT RUL MODELS
their assets better to improve availability and increase revenue.
MODLE HI from HI from HI from
linear elastic dislocation hybrid ACKNOWLEDGMENT
method method method
We would like to thank Dr. Kai Goebel, VP, Director of
MONOTONICITY 0.5647 0.5528 0.8495 Intelligent Systems Lab at Parc. Dr. Goebel's insight that failure
TRENDABILITY 0.7857 0.7810 0.9286
may have complex modes and that combining models may
improve the RUL performance was the start of this effort.
REFERENCES
From (16), the trendability value is related to the time [1] P. Vercer, M. Kreidl, R. Smit, "Condition Indicators for Gearbox
window. In Table II, the time window is set to 20. To stress the Condition Monitoring Systems," Acta Polytechnica, vol. 45, no. 6, 2005.
variation impacted by the time window, the time window is [2] E. Bechhoefer, A. Bernhard, "A Generalized Process for Optimal
changed from 10 hours to 200 by 10 increments in each step; the Threshold Setting in HUMS," IEEE Aerospace Conference, MT, USA,
results are shown in Figure 5. As can be seen, the hybrid method March 2007.
always shows a higher trendability value compared with the [3] E. Bechhoefer, D. He, P. Dempsey, "Gear Health Threshold Setting
contending methods. Based On a Probability of False Alarm," Conference of the Prognostics
and Health Management Society, 2011.
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
[4] E. Bechhoefer, A. Bernhard, "Use of Non-Gaussian Distribution for [8] Coble, Jamie Baalis, "Merging Data Sources to Predict Remaining Useful
Analysis of Shaft Components," IEEE Aerospace Conference, 2005. Life – An Automated Method to Identify Prognostic Parameters" Ph.D.
[5] F. Beer, E. Johnston, Mechanics of Materials, McGraw-Hill, New York, diss., University of Tennessee, 2010.
1992. http://trace.tennessee.edu/utk_graddiss/683
[6] N. Frost, K. March, and L. Pook, Metal Fatigue, Dover Publication, [9] Bechhoefer, E., & Dube, M. (2020). Contending Remaining Useful Life
Mineola, NY, 1999. Algorithms. Annual Conference of the PHM Society, 12(1), 9.
https://doi.org/10.36001/phmconf.2020.v12i1.1274
[7] Bar-Shalom, Multitarget-Multisensor Tracking: Application and
Advances, Artech House, 1992.
2021 Global Reliability and Prognostics and Health Management
(PHM-Nanjing)
You might also like
- Vehicle Health Monitoring On A TruckDocument19 pagesVehicle Health Monitoring On A TruckEric BechhoeferNo ratings yet
- Estimating Helicopter Gross Weight Using HUMS DataDocument5 pagesEstimating Helicopter Gross Weight Using HUMS DataEric BechhoeferNo ratings yet
- Comprehensive Condition Monitoring Analysis For Power Plant Boiler Circulator PumpsDocument7 pagesComprehensive Condition Monitoring Analysis For Power Plant Boiler Circulator PumpsEric BechhoeferNo ratings yet
- Processing For Improved Spectral AnalysisDocument5 pagesProcessing For Improved Spectral AnalysisEric BechhoeferNo ratings yet
- PHM13 AeDocument8 pagesPHM13 AeEric BechhoeferNo ratings yet
- Improved Spectral Estimation of Signals Using Quadratic InterpolationDocument6 pagesImproved Spectral Estimation of Signals Using Quadratic InterpolationEric BechhoeferNo ratings yet
- Bechhoefer Cycloid Gearbox-PaperDocument12 pagesBechhoefer Cycloid Gearbox-PaperEric BechhoeferNo ratings yet
- Contending RUL AlgorithmsDocument10 pagesContending RUL AlgorithmsEric BechhoeferNo ratings yet
- A Model For Inferred Gross Weight Using HUMS DataDocument5 pagesA Model For Inferred Gross Weight Using HUMS DataEric BechhoeferNo ratings yet
- PHM 2019 ComprehensiveGearFaultAlgorithmsDocument11 pagesPHM 2019 ComprehensiveGearFaultAlgorithmsEric BechhoeferNo ratings yet
- Improved Spectral Estimation of Signals Using Quadratic InterpolationDocument11 pagesImproved Spectral Estimation of Signals Using Quadratic InterpolationEric BechhoeferNo ratings yet
- Signal Processing To Reduce The Effect of Gear DynamicsDocument7 pagesSignal Processing To Reduce The Effect of Gear DynamicsEric BechhoeferNo ratings yet
- Low Computation, Nonlinear Component Trend AnalysisDocument6 pagesLow Computation, Nonlinear Component Trend AnalysisEric BechhoeferNo ratings yet
- MFPT2019 Bearing FaultDocument9 pagesMFPT2019 Bearing FaultEric BechhoeferNo ratings yet
- Condition Monitoring of A Cycloid GearboxDocument5 pagesCondition Monitoring of A Cycloid GearboxEric BechhoeferNo ratings yet
- Low Computation Acoustic Emissions Structural Health Monitoring Through Analog Signal Pre-ProcessingDocument7 pagesLow Computation Acoustic Emissions Structural Health Monitoring Through Analog Signal Pre-ProcessingEric BechhoeferNo ratings yet
- Remaining Useful Life Calculation of A Component Using Hybrid Fatigue Crack ModelDocument8 pagesRemaining Useful Life Calculation of A Component Using Hybrid Fatigue Crack ModelEric BechhoeferNo ratings yet
- Signal Processing To Reduce The Effect of Gear DynamicsDocument7 pagesSignal Processing To Reduce The Effect of Gear DynamicsEric BechhoeferNo ratings yet
- Estimating Helicopter Gross Weight Using HUMS DataDocument5 pagesEstimating Helicopter Gross Weight Using HUMS DataEric BechhoeferNo ratings yet
- Estimating Helicopter Gross Weight Using HUMS DataDocument5 pagesEstimating Helicopter Gross Weight Using HUMS DataEric BechhoeferNo ratings yet
- A Comprehensive Analysis of The Performance of Gear Fault Detection AlgorithmsDocument11 pagesA Comprehensive Analysis of The Performance of Gear Fault Detection AlgorithmsEric BechhoeferNo ratings yet
- Signal Processing Techniques To Improve An Acoustic Emmissons SensorDocument8 pagesSignal Processing Techniques To Improve An Acoustic Emmissons SensorEric BechhoeferNo ratings yet
- Time Synchronous Average Based Acoustic Emission Signal Analysis On Gear Fault DetectionDocument9 pagesTime Synchronous Average Based Acoustic Emission Signal Analysis On Gear Fault DetectionEric BechhoeferNo ratings yet
- Processing For Improved Spectral AnalysisDocument6 pagesProcessing For Improved Spectral AnalysisEric BechhoeferNo ratings yet
- Rotor Track and Balance ImprovementsDocument9 pagesRotor Track and Balance ImprovementsEric BechhoeferNo ratings yet
- An Enhanced Time Synchronous Averaging For Rotating Equpiment AnalysisDocument10 pagesAn Enhanced Time Synchronous Averaging For Rotating Equpiment AnalysisEric BechhoeferNo ratings yet
- Analog Signal Processing To Improve Acoustic Emissions SensingDocument13 pagesAnalog Signal Processing To Improve Acoustic Emissions SensingEric BechhoeferNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PD Cen TR 13445-9-2011Document46 pagesPD Cen TR 13445-9-2011MaiDuyNo ratings yet
- Blade Design Calvin John PDFDocument35 pagesBlade Design Calvin John PDFElijah NormanNo ratings yet
- TÜVIS-Prüfgrundlagen AD 2000 Code Evaluation StressesDocument8 pagesTÜVIS-Prüfgrundlagen AD 2000 Code Evaluation StressesUfuk ÇİMENNo ratings yet
- An Analysis of Metal Fatigue Based On Hysteresis EnergyDocument5 pagesAn Analysis of Metal Fatigue Based On Hysteresis EnergyKhouloud GharbiNo ratings yet
- Def Stan 00-970 Part 7-2Document159 pagesDef Stan 00-970 Part 7-2rokhgireh_hojjatNo ratings yet
- Field Performance of BlueCoil Including Performance of Mechanically Damaged CTDocument15 pagesField Performance of BlueCoil Including Performance of Mechanically Damaged CTbehrooz rajabshehniNo ratings yet
- Api RP 8BDocument6 pagesApi RP 8BAntonio França0% (1)
- Ship Vibration Calculation and Measurement TechniquesDocument51 pagesShip Vibration Calculation and Measurement Techniquesphuocthontu100% (1)
- Bombardier Transportation Fast Tracking Rail Vehicle DesignDocument17 pagesBombardier Transportation Fast Tracking Rail Vehicle DesignAltairEnlightenNo ratings yet
- Alcan Anglais Chap.00.IntroDocument8 pagesAlcan Anglais Chap.00.IntroJohn RongNo ratings yet
- Metal Replacement Forum 2014Document287 pagesMetal Replacement Forum 2014eitan-dalia4971100% (1)
- Annex 6: FDS DOC (2001) 06 (Rev.3) Annex 6 / 297Document39 pagesAnnex 6: FDS DOC (2001) 06 (Rev.3) Annex 6 / 297Vasil GeorgievNo ratings yet
- HSE Offshore Ageing Programme InspectionDocument33 pagesHSE Offshore Ageing Programme InspectionEyoma EtimNo ratings yet
- Theory Sine Sweep Vs Random Vibration TestingDocument2 pagesTheory Sine Sweep Vs Random Vibration TestingblakolNo ratings yet
- Socie 3.0 Multiaxial FatigueDocument127 pagesSocie 3.0 Multiaxial FatigueKuan Tek Seang50% (2)
- Causes of Boiler Tube Leakage and MeasuresDocument19 pagesCauses of Boiler Tube Leakage and MeasuresNhật TuấnNo ratings yet
- Finite Element Analysis of Stress-Strain and Deflection in Flexible PavementsDocument12 pagesFinite Element Analysis of Stress-Strain and Deflection in Flexible PavementsMohammed SumerNo ratings yet
- 10.1.1.144.9002 SW FatigueDocument13 pages10.1.1.144.9002 SW Fatigueb_wooNo ratings yet
- Fundamental Theory of Damages ExplainedDocument30 pagesFundamental Theory of Damages ExplainedMisge ChekoleNo ratings yet
- Conexiones y Aplicaciones Estructurales de Compuestos Poliméricos Reforzados Con Fibra para Infraestructura Civil en Entornos AgresivosDocument15 pagesConexiones y Aplicaciones Estructurales de Compuestos Poliméricos Reforzados Con Fibra para Infraestructura Civil en Entornos Agresivosjose mauricio muñoz bolivarNo ratings yet
- Managing Ageing Threats On The RAAF PC-9 AircraftDocument28 pagesManaging Ageing Threats On The RAAF PC-9 AircraftIan WhitingNo ratings yet
- Ap T188 11Document82 pagesAp T188 11adjiNo ratings yet
- Vibration Analysis of Cracked BeamDocument80 pagesVibration Analysis of Cracked Beamyq zhangNo ratings yet
- CH 6Document19 pagesCH 6Omar AbdullahNo ratings yet
- Mutton 2004Document16 pagesMutton 2004Maicon RossiniNo ratings yet
- Review On Internal Combustion Engine Vibrations and MountingsDocument12 pagesReview On Internal Combustion Engine Vibrations and MountingsSanthosh KumarNo ratings yet
- Manual Instron 8802 Servohydraulic Fatigue Testing SystemDocument2 pagesManual Instron 8802 Servohydraulic Fatigue Testing SystemOssamaElKhalNo ratings yet
- Design of Bolted Connections in Steel StructuresDocument4 pagesDesign of Bolted Connections in Steel StructuresHarish T S Gowda0% (1)
- Frame Designing and Architecture of Electric Dirt Bike-IJRASETDocument16 pagesFrame Designing and Architecture of Electric Dirt Bike-IJRASETIJRASETPublicationsNo ratings yet
- Esslinger-2004-The Railway Accident of Eschede-Published VersionDocument24 pagesEsslinger-2004-The Railway Accident of Eschede-Published VersionBiruk YifruNo ratings yet