You might also like
- BITS Pilani: Reconfigurable Computing Es ZG 554 / Mel ZG 554 Session 1Document23 pagesBITS Pilani: Reconfigurable Computing Es ZG 554 / Mel ZG 554 Session 1Rahamtulla MohammadNo ratings yet
- Hardware Software Co-Design: BITS PilaniDocument26 pagesHardware Software Co-Design: BITS PilanimadhavNo ratings yet
- Reconfigurable Computing ES ZG554 Session 1: BITS PilaniDocument18 pagesReconfigurable Computing ES ZG554 Session 1: BITS PilaniroykvincentNo ratings yet
- BITS Pilani: Hardware Software Co-Design ES/SE/SS ZG626, MEL ZG651 Session 1Document28 pagesBITS Pilani: Hardware Software Co-Design ES/SE/SS ZG626, MEL ZG651 Session 1vinay kumarNo ratings yet
- BITS Pilani: Hardware Software Co-Design ES/SE/SS ZG626, MEL ZG651 Session 2Document36 pagesBITS Pilani: Hardware Software Co-Design ES/SE/SS ZG626, MEL ZG651 Session 2vinay kumar100% (1)
- ESD Merged CS 01-11Document369 pagesESD Merged CS 01-11Slaney AguiarNo ratings yet
- Unit 1 and 2 PPTsDocument81 pagesUnit 1 and 2 PPTsKundankumar Saraf100% (2)
- ESD FullDocument932 pagesESD FullSlaney AguiarNo ratings yet
- Hardware Software Co-Design: BITS PilaniDocument38 pagesHardware Software Co-Design: BITS Pilaniswapna revuriNo ratings yet
- Embedded System DesignDocument4 pagesEmbedded System DesignMeenakshi SundaramNo ratings yet
- Agend A: BITS PilaniDocument367 pagesAgend A: BITS PilaniSameer KunalNo ratings yet
- Mechatronics and Automation Simulation LabDocument16 pagesMechatronics and Automation Simulation Labbalaji817150No ratings yet
- RTS Lecture 1 1642240037391Document24 pagesRTS Lecture 1 1642240037391Gaurav BagdeNo ratings yet
- BITS ZG553 Real Time Systems L-1 KGK 1564743779321 PDFDocument41 pagesBITS ZG553 Real Time Systems L-1 KGK 1564743779321 PDFhhNo ratings yet
- BITS Pilani: Computer Programming (MATLAB) Dr. Samir Kale Revision Class-01/03/2019Document166 pagesBITS Pilani: Computer Programming (MATLAB) Dr. Samir Kale Revision Class-01/03/2019harshalNo ratings yet
- IT1353 Embedded System (All 5 Units)Document71 pagesIT1353 Embedded System (All 5 Units)Dr. N.ShanmugasundaramNo ratings yet
- Bits Zg553 Rtos AllDocument797 pagesBits Zg553 Rtos AllShivam ShuklaNo ratings yet
- Eee Zg512 Ec-3r First Sem 2013-2014Document5 pagesEee Zg512 Ec-3r First Sem 2013-2014Shivam ShuklaNo ratings yet
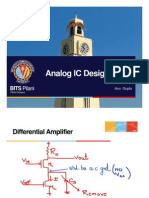
- Diff AmpDocument105 pagesDiff AmpNeha Pachauri100% (1)
- Q.1. (2) Q.2. Q.3. (3) Q.4Document1 pageQ.1. (2) Q.2. Q.3. (3) Q.4vithyaNo ratings yet
- CMOS IntroDocument45 pagesCMOS IntroNishanth Nish0% (1)
- Adsp All ModuleDocument175 pagesAdsp All Modulemohit bohra100% (1)
- Embedded System Design - NotesDocument110 pagesEmbedded System Design - NotesKishan SNo ratings yet
- Open Source Iot Lab For Educational Institutions: A Relevant, Authorised Image Will Be Added Here by The StaffDocument12 pagesOpen Source Iot Lab For Educational Institutions: A Relevant, Authorised Image Will Be Added Here by The StaffRanjith DNo ratings yet
- Bitszg553 Ec-3r Second Sem 2013-2014Document1 pageBitszg553 Ec-3r Second Sem 2013-2014Shivam ShuklaNo ratings yet
- Introduction To VLSI DesignDocument33 pagesIntroduction To VLSI DesignAnonymous P9xMOgEYt1No ratings yet
- NodeMCU PDFDocument40 pagesNodeMCU PDFNIKHIL ARORA100% (1)
- DM Batch 1 CombinedDocument400 pagesDM Batch 1 Combinedspraveen230% (1)
- 6 - Cyber Physical Systems PDFDocument21 pages6 - Cyber Physical Systems PDFNIKHIL ARORANo ratings yet
- Lastyear LectDocument496 pagesLastyear Lectsantosh vighneshwar hegdeNo ratings yet
- MosfetDocument15 pagesMosfetDr-Sanjeev KashyapNo ratings yet
- Course Handout AE ZG518 Electric & Hybrid VehiclesDocument5 pagesCourse Handout AE ZG518 Electric & Hybrid VehiclesSindhuja ViswanathanNo ratings yet
- Group E: Embedded Systems: Dustin Graves CSCI 342 January 25, 2007Document33 pagesGroup E: Embedded Systems: Dustin Graves CSCI 342 January 25, 2007niteshwarbhardwajNo ratings yet
- CMOS Inverter SchematicDocument19 pagesCMOS Inverter SchematicdileshwarNo ratings yet
- Unit 1-EsiotDocument46 pagesUnit 1-EsiotSonia BajajNo ratings yet
- Laboratory Manual Cadence Tste80 07Document26 pagesLaboratory Manual Cadence Tste80 07chetan_bec2834No ratings yet
- Virtual Laboratory: Iit KharagpurDocument19 pagesVirtual Laboratory: Iit KharagpurSENTHIL RNo ratings yet
- Embedded SystemsDocument2 pagesEmbedded SystemsKavitha SubramaniamNo ratings yet
- A1429 VlsiDocument8 pagesA1429 VlsiratnamsNo ratings yet
- VLSI Design Question BankDocument10 pagesVLSI Design Question Bankbooks babuNo ratings yet
- Laboratory Exercise 4 Cmos Inverter LayoutDocument10 pagesLaboratory Exercise 4 Cmos Inverter Layoutapi-3696675No ratings yet
- Wireless Communication and RF System Design Using Matlab and SimulinkDocument40 pagesWireless Communication and RF System Design Using Matlab and SimulinkThương HDNo ratings yet
- Ultra Sonic Sensor PDFDocument14 pagesUltra Sonic Sensor PDFNIKHIL ARORA100% (1)
- Introduction To PSpiceDocument15 pagesIntroduction To PSpiceUmera Anjum100% (1)
- HWSW Co Design Unit-1notesDocument195 pagesHWSW Co Design Unit-1notesswapna revuriNo ratings yet
- 6 Months Electronics VLSI Design VerificationDocument26 pages6 Months Electronics VLSI Design VerificationAvadhesh Pandey0% (1)
- Embedded Systems DesignDocument141 pagesEmbedded Systems DesignAryan Hrushik SharmaNo ratings yet
- Analog Circuits: GATE EC Topic Wise QuestionsDocument50 pagesAnalog Circuits: GATE EC Topic Wise Questionsdeepthi1993100% (1)
- 4.chapter4 CMOS Multistages Differential AmplifierDocument60 pages4.chapter4 CMOS Multistages Differential Amplifierngoc an nguyenNo ratings yet
- ECE 410: VLSI Design Course Lecture Notes: (Uyemura Textbook)Document54 pagesECE 410: VLSI Design Course Lecture Notes: (Uyemura Textbook)BHANU PRAKASH0% (1)
- Chapter - 3 Deld 2017Document37 pagesChapter - 3 Deld 2017Anand GharuNo ratings yet
- 16EC454 ASIC Design SyllabusDocument2 pages16EC454 ASIC Design SyllabusGautami SumanNo ratings yet
- Power System Simulation Lab ManualDocument41 pagesPower System Simulation Lab ManualgokulchandruNo ratings yet
- Laboratory Manual CadenceDocument26 pagesLaboratory Manual Cadencekbmn2No ratings yet
- Realtime Operating System (15EC743 / 10EC762)Document124 pagesRealtime Operating System (15EC743 / 10EC762)well wisherNo ratings yet
- Digital Design Through Verilog HDL Course Outcomes For LabDocument1 pageDigital Design Through Verilog HDL Course Outcomes For LabSyed AshmadNo ratings yet
- Introduction To Machine Learning: Dr.S.Sankar Ganesh Vellore Institute of TechnologyDocument132 pagesIntroduction To Machine Learning: Dr.S.Sankar Ganesh Vellore Institute of TechnologysartgNo ratings yet
- EMBEDDED PPTDocument23 pagesEMBEDDED PPTArun Kumar MANo ratings yet
- Specification and Modelling Concepts Module 2Document56 pagesSpecification and Modelling Concepts Module 2tauseef qidwaiNo ratings yet
- L-2-2-Establishing Product Function: BITS PilaniDocument19 pagesL-2-2-Establishing Product Function: BITS PilaniSandhyaNo ratings yet
- UBIQUITOUSDocument4 pagesUBIQUITOUSvinay kumarNo ratings yet
- PervasiveDocument4 pagesPervasivevinay kumarNo ratings yet
- In UxDocument4 pagesIn Uxvinay kumarNo ratings yet
- DISCIPLINEDocument4 pagesDISCIPLINEvinay kumarNo ratings yet
- COMPUTINGDocument4 pagesCOMPUTINGvinay kumarNo ratings yet
- TASKING TriCore Tools Linker Tips - Tricks - WEBDocument12 pagesTASKING TriCore Tools Linker Tips - Tricks - WEBvinay kumarNo ratings yet
- C: T.E. S: Tcs Q B T - I: (Academic Year 2018-19 Odd Sem)Document3 pagesC: T.E. S: Tcs Q B T - I: (Academic Year 2018-19 Odd Sem)jayabaNo ratings yet
- Finite Automata With Output: Lecture ObjectiveDocument6 pagesFinite Automata With Output: Lecture ObjectiveAyazNo ratings yet
- F5 - FSM Modelling and Synthesis PDFDocument91 pagesF5 - FSM Modelling and Synthesis PDF陈晟音乐族--王子No ratings yet
- Automata - What Is It?: Formal Definition of A Finite AutomatonDocument35 pagesAutomata - What Is It?: Formal Definition of A Finite AutomatonShaista SaeedNo ratings yet
- 2way & With Output AutomataDocument25 pages2way & With Output Automatapramod198965No ratings yet
- CENG 5133: Computer Architecture Design: Sequential CircuitsDocument22 pagesCENG 5133: Computer Architecture Design: Sequential Circuitsgopika hariNo ratings yet
- Coa D1Document32 pagesCoa D1Csk CskNo ratings yet
- Top 30+ Most Asked VLSI Interview Questions (2021) : 1) What Do You Understand by Boolean Logic?Document11 pagesTop 30+ Most Asked VLSI Interview Questions (2021) : 1) What Do You Understand by Boolean Logic?Nic JonesNo ratings yet
- Chapter-1: Sequence Detector Using Moore MachineDocument17 pagesChapter-1: Sequence Detector Using Moore MachineVaibhaviNo ratings yet
- Regular ExpressiontzzzDocument46 pagesRegular ExpressiontzzzYimenu TesfahunNo ratings yet
- Counter& State MachinesDocument55 pagesCounter& State MachinesFahim MahmudNo ratings yet
- 248 Lab 11Document10 pages248 Lab 11Tyron BiggumsNo ratings yet
- Flat (Complete Notes)Document91 pagesFlat (Complete Notes)varshitapericherla24No ratings yet
- Sequencer 110Document2 pagesSequencer 110maha8 balaNo ratings yet
- TOCDocument12 pagesTOCYash SugandhiNo ratings yet
- Alford C.digital Design VHDL Laboratory Notes.1996Document62 pagesAlford C.digital Design VHDL Laboratory Notes.1996Ion CaimacanNo ratings yet
- Moore Mealy Machine Lecture-1Document15 pagesMoore Mealy Machine Lecture-1ali yousafNo ratings yet
- DD Slides6Document57 pagesDD Slides6tanay.s1No ratings yet
- Unit IDocument10 pagesUnit IManish ValechhaNo ratings yet
- Switching Theory and Logic DesignDocument8 pagesSwitching Theory and Logic DesignVenkat ChadalavadaNo ratings yet
- Module 61 Finite State Machines PROFDocument14 pagesModule 61 Finite State Machines PROFJohn Ace FaustinoNo ratings yet
- Stateflow® User's Guide PDFDocument1,554 pagesStateflow® User's Guide PDFVictor Colpo NavarreteNo ratings yet
- Cs402 Collection of Old PapersDocument30 pagesCs402 Collection of Old Paperscs619finalproject.com67% (3)
- FSM DesignDocument61 pagesFSM DesignParesh SawantNo ratings yet
- State MachinesDocument10 pagesState Machinesطه عمر طهNo ratings yet
- Automata Moore MealyMachineDocument6 pagesAutomata Moore MealyMachineratna.patilNo ratings yet
- Clocked Synchronous State MachinesDocument2 pagesClocked Synchronous State MachinesMahesh AbnaveNo ratings yet
- Tap FSMDocument39 pagesTap FSMMadhukumar KsNo ratings yet
- De ManualDocument56 pagesDe ManualBhuvanesh Kakarla AP21110010593No ratings yet