You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Steady State Performance Analysis of Hydrostatic Transmission System (HST)Document4 pagesSteady State Performance Analysis of Hydrostatic Transmission System (HST)polat035No ratings yet
- Active Suspension and Anti-Lock Braking Systems For Passenger CarsDocument8 pagesActive Suspension and Anti-Lock Braking Systems For Passenger Carspolat035No ratings yet
- Mathematical Modelling and Digital Simulation of Asymmetric Hy-Draulic Motors Fitted With Dynamics Compensating Mechanical-Hydraulic NetworksDocument4 pagesMathematical Modelling and Digital Simulation of Asymmetric Hy-Draulic Motors Fitted With Dynamics Compensating Mechanical-Hydraulic Networkspolat035No ratings yet
- AIM09 0228pneumaticDocument6 pagesAIM09 0228pneumaticpolat035No ratings yet
- Scientific Review: Controlling of EDM Servo System Using Fuzzy Logic ControllerDocument5 pagesScientific Review: Controlling of EDM Servo System Using Fuzzy Logic Controllerpolat035No ratings yet
- アイマン アリ ,大 内 英 俊 ,アハメッド アボ・イスマイル Fuzzy Model Reference Learning Control for Positioning an Electro―Hydraulic Servo System Ayman A. ALY, Hidetoshi OHUCHI, Ahmed Abo―ISMAILDocument6 pagesアイマン アリ ,大 内 英 俊 ,アハメッド アボ・イスマイル Fuzzy Model Reference Learning Control for Positioning an Electro―Hydraulic Servo System Ayman A. ALY, Hidetoshi OHUCHI, Ahmed Abo―ISMAILpolat035No ratings yet
- An Intelligent Electro-Hydraulic Servo Drive Positioning: Detiček, E. - Župerl, UDocument11 pagesAn Intelligent Electro-Hydraulic Servo Drive Positioning: Detiček, E. - Župerl, Upolat035No ratings yet
- Modeling and Simulation On Fuzzy-PID Position Controller of Electro Hydraulic Servo SystemDocument6 pagesModeling and Simulation On Fuzzy-PID Position Controller of Electro Hydraulic Servo Systempolat035No ratings yet
- Feedback Linearisation Control For Electrohydrauiic Syste:Ms of A Robotic ExcavatorDocument6 pagesFeedback Linearisation Control For Electrohydrauiic Syste:Ms of A Robotic Excavatorpolat035No ratings yet
- Drager-Primus-Manual de Servicio-101-150Document50 pagesDrager-Primus-Manual de Servicio-101-150jesus molinaNo ratings yet
- E 477 ContentDocument52 pagesE 477 ContentbhavikNo ratings yet
- Medium Voltage CablesDocument82 pagesMedium Voltage Cablesmealysr100% (1)
- Hyper TerminalDocument6 pagesHyper TerminalLua Cheong Hong100% (1)
- Ewsd Overview One DayDocument58 pagesEwsd Overview One DayWaqar AsmatNo ratings yet
- Asian VLF Observation Network Pontianak Station: - UpdateDocument13 pagesAsian VLF Observation Network Pontianak Station: - UpdateOemar BakrieNo ratings yet
- AP1000 Air Purger PUBL-7890 2021 ENDocument2 pagesAP1000 Air Purger PUBL-7890 2021 ENSalahNo ratings yet
- Mass w200 ManualDocument76 pagesMass w200 ManualjellyjohnNo ratings yet
- Polycab Price List - Wires and Cables March 2019Document2 pagesPolycab Price List - Wires and Cables March 2019Belectric entpNo ratings yet
- Data SheetDocument19 pagesData SheetRobertoBarbosaNo ratings yet
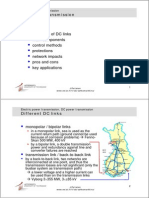
- Topics: Principles of DC Links Main Components Control Methods Protections Network Impacts Pros and Cons Key ApplicationsDocument16 pagesTopics: Principles of DC Links Main Components Control Methods Protections Network Impacts Pros and Cons Key Applicationselvaz1973No ratings yet
- 01 GreenUp Highbay PresentationDocument23 pages01 GreenUp Highbay PresentationHusnain AssociatesNo ratings yet
- Static RAM OperationDocument12 pagesStatic RAM Operationgongster100% (3)
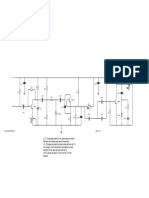
- Livewire - Professional Edition - Circuito TransmisorDocument1 pageLivewire - Professional Edition - Circuito TransmisorRey TiburonNo ratings yet
- Bus Tie Duct (BTD) Bus Bar Trunking System - Rawalpindi CMH: Specialist inDocument8 pagesBus Tie Duct (BTD) Bus Bar Trunking System - Rawalpindi CMH: Specialist inHamad GulNo ratings yet
- Aiwa CX Jpk331Document80 pagesAiwa CX Jpk331fredyariasdNo ratings yet
- Conductance Questions and Answers: Q. What Is Conductance?Document4 pagesConductance Questions and Answers: Q. What Is Conductance?johan_andradef8376No ratings yet
- Data Exchange Worksheet 1 BradleyDocument3 pagesData Exchange Worksheet 1 Bradleyapi-523316592No ratings yet
- Motorpact™ 200/400/450 A Vacuum Contactors Contactores en Vacío Motorpact™ de 200, 400 y 450 A Contacteurs Sous Vide Motorpact 200/400/450 ADocument76 pagesMotorpact™ 200/400/450 A Vacuum Contactors Contactores en Vacío Motorpact™ de 200, 400 y 450 A Contacteurs Sous Vide Motorpact 200/400/450 AEduardo Castañares VillarroelNo ratings yet
- Model E2 Ve2 Manual Rev 2.3.13Document68 pagesModel E2 Ve2 Manual Rev 2.3.13manoj tyagiNo ratings yet
- Legrand New Pop UpDocument20 pagesLegrand New Pop UpAdinugroho SunardiNo ratings yet
- Kingston Hyper Fury HX318LC11FBK2 - 16Document2 pagesKingston Hyper Fury HX318LC11FBK2 - 16Paul KarijaNo ratings yet
- Module 3: Electropneumatics: Relay Control SystemDocument36 pagesModule 3: Electropneumatics: Relay Control Systemanon_444174592No ratings yet
- Development of An Edge-Element Model For AC Loss Computation of High-Temperature SuperconductorsDocument10 pagesDevelopment of An Edge-Element Model For AC Loss Computation of High-Temperature SuperconductorsAndrea MussoNo ratings yet
- Electrical Design of High-Speed Induction Motors of Up To 15 MW and 20000 RPMDocument7 pagesElectrical Design of High-Speed Induction Motors of Up To 15 MW and 20000 RPMzachxie100% (1)
- Gujarat Technological University Chandkheda, Ahmedabad Affiliated HJD Institute of Technical Education & ResearchDocument33 pagesGujarat Technological University Chandkheda, Ahmedabad Affiliated HJD Institute of Technical Education & ResearchJaimin ChainaniNo ratings yet
- Spare Bushing Work FilesDocument16 pagesSpare Bushing Work FilesBarry79xNo ratings yet
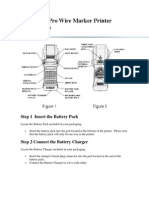
- Brady I.D. Pro Wire Marker Printer Instructions: Step 1 Insert The Battery PackDocument7 pagesBrady I.D. Pro Wire Marker Printer Instructions: Step 1 Insert The Battery PackinggerardoNo ratings yet
- New Mobility Concepts: Soc Classification Level 1 © Nokia Siemens NetworksDocument54 pagesNew Mobility Concepts: Soc Classification Level 1 © Nokia Siemens NetworksTry TestNo ratings yet
- 01 Vol4 Circuit Kinematic Couplings Co-Simulation SkewDocument352 pages01 Vol4 Circuit Kinematic Couplings Co-Simulation SkewSamuel MolinariNo ratings yet