You might also like
- CH 19Document21 pagesCH 19Sanjay Kumar100% (1)
- Helical Gears ProjectDocument42 pagesHelical Gears ProjectRavi Tarun100% (1)
- Shaper Machine SeminrDocument20 pagesShaper Machine SeminrSoumya Banerjee80% (5)
- Report On Helical Gear DesignDocument3 pagesReport On Helical Gear Designdanish100% (1)
- FMM - Unit Iv QBDocument52 pagesFMM - Unit Iv QBThiruvasagamoorthy KaNo ratings yet
- Chapter 3-BreakDocument37 pagesChapter 3-Breakkibromgidey12No ratings yet
- GearsDocument78 pagesGearsL.K. Bhagi100% (1)
- Rolling Contact BearingsDocument11 pagesRolling Contact BearingsritNo ratings yet
- Mechanical Design Project ReportDocument117 pagesMechanical Design Project ReportPlutus Mo100% (2)
- 64217Document28 pages64217amdevaNo ratings yet
- Bearing and Their Types PDFDocument6 pagesBearing and Their Types PDFOsaid Haq83% (6)
- TUTORIAL 3 Design of Shaft Key and CouplingDocument2 pagesTUTORIAL 3 Design of Shaft Key and Couplingrip111176100% (1)
- Chapter 3 Gears and Gear Trains 19 PDFDocument37 pagesChapter 3 Gears and Gear Trains 19 PDFMITTAPALLI PAVAN KUMAR REDDYNo ratings yet
- Project ReportDocument19 pagesProject ReportEr Nandkishor Prajapati86% (7)
- Design and Fabrication of Metal Bending MachineDocument12 pagesDesign and Fabrication of Metal Bending Machineshashi rayudu67% (3)
- Analysis of Scissor JackDocument30 pagesAnalysis of Scissor Jackdawit100% (4)
- Gear Box Design Assignment S2 2012Document10 pagesGear Box Design Assignment S2 2012Nang TruongNo ratings yet
- Cotter JointDocument18 pagesCotter JointritNo ratings yet
- Mech Lathe Machine ReportDocument15 pagesMech Lathe Machine ReportLary Dela Cruz Guevarra100% (1)
- Automats and Tool LayoutsDocument20 pagesAutomats and Tool LayoutsAyesha IshuNo ratings yet
- Design and Fabrication of Four Way Hacksaw MachineDocument22 pagesDesign and Fabrication of Four Way Hacksaw MachineDinesh KumarNo ratings yet
- Journal Bearing ApparatusDocument6 pagesJournal Bearing ApparatusGurmeet Mehma67% (6)
- Shaft LayoutDocument21 pagesShaft LayoutAmmar SafwtNo ratings yet
- Spur Gear Cutting On Universal Milling MachineDocument8 pagesSpur Gear Cutting On Universal Milling MachineMurali SiddarthNo ratings yet
- Couplings PDFDocument41 pagesCouplings PDFAshishAgarwal89% (18)
- Project Report On Analysis of Propeller ShaftDocument24 pagesProject Report On Analysis of Propeller ShaftGurpreet Singh50% (8)
- Flange CouplingDocument15 pagesFlange CouplingGanesh Dongre0% (1)
- ME8651qb Design of Transmission SystemsDocument18 pagesME8651qb Design of Transmission SystemsMURALI KRISHNAN RNo ratings yet
- Design and Fabrication of Pedal Operated Water PumpDocument14 pagesDesign and Fabrication of Pedal Operated Water PumpNagesh Sunny67% (3)
- Design and Fabrication of An Oldham Coupling Mechanism: Term ProjectDocument20 pagesDesign and Fabrication of An Oldham Coupling Mechanism: Term ProjectSidharth MalohtraNo ratings yet
- Design of CouplingsDocument44 pagesDesign of CouplingsAtish GhoshNo ratings yet
- CouplingDocument30 pagesCouplingAdmirable VishalNo ratings yet
- Project Report PDFDocument39 pagesProject Report PDFTejas Inamdar67% (3)
- Bevel Gears - PPT (Revised) PDFDocument47 pagesBevel Gears - PPT (Revised) PDFsidguru chinchole50% (2)
- Belt DriveDocument19 pagesBelt DriveHemraj Thakare0% (1)
- Introduction To Power Screw AssingmentDocument4 pagesIntroduction To Power Screw AssingmentZohaibShoukatBalochNo ratings yet
- Fabrication of Hydraulic Pipie Bending MachineDocument50 pagesFabrication of Hydraulic Pipie Bending MachineElakkiya Karthic100% (4)
- Four Way Hacksaw All CalculationDocument4 pagesFour Way Hacksaw All Calculationkanchan bone80% (5)
- Design and Analysis of IC Engine FinsDocument52 pagesDesign and Analysis of IC Engine FinsShiva KumarNo ratings yet
- Design of CouplingDocument75 pagesDesign of CouplingVatsal BhalaniNo ratings yet
- Gear DesignDocument22 pagesGear DesignKhalil Raza100% (4)
- Notes-1 (Turbomachines)Document24 pagesNotes-1 (Turbomachines)VIRAJ HADKARNo ratings yet
- Design of Roller Contact BearingDocument60 pagesDesign of Roller Contact BearingJatin ChaudhariNo ratings yet
- Beam Engine Mechanism Powered Circular Sawing Machine ReportDocument13 pagesBeam Engine Mechanism Powered Circular Sawing Machine Reportanon_604107846No ratings yet
- Experiment No 3Document3 pagesExperiment No 3pomar026100% (1)
- Flywheel Types and DesignDocument23 pagesFlywheel Types and DesignALL IN ONE0% (1)
- Spur Gear Problems PDFDocument79 pagesSpur Gear Problems PDFSharmila Shetty100% (1)
- Power HacksawDocument30 pagesPower Hacksawbilal shaikh100% (2)
- Chapter-2 Engineering Graphics PDFDocument47 pagesChapter-2 Engineering Graphics PDFVidya Narayan100% (2)
- Compression Test On Cast IronDocument11 pagesCompression Test On Cast IronEvan BoaloyNo ratings yet
- Corse Project Report: Report Title: Belt GrinderDocument18 pagesCorse Project Report: Report Title: Belt GrinderAHMED ALZAHRANINo ratings yet
- Centrifugal Pump - Project Reportcopy-1Document40 pagesCentrifugal Pump - Project Reportcopy-1DR SHNGM0% (1)
- JJ309 Fluid Mechanics Unit 5Document21 pagesJJ309 Fluid Mechanics Unit 5Adib AzharNo ratings yet
- Single-Stage GearboxDocument21 pagesSingle-Stage Gearboxapi-469023149No ratings yet
- Automobile Lab ManualDocument35 pagesAutomobile Lab ManualKeshav AsopaNo ratings yet
- Design and Fabrication of Shaft Driven Bicycle PDFDocument46 pagesDesign and Fabrication of Shaft Driven Bicycle PDFmustufa akolawalaNo ratings yet
- Shaft MSALDocument23 pagesShaft MSALparthadhav2020.mech1No ratings yet
- Sample Project ReportDocument46 pagesSample Project ReportRushabh Rajendra YerunkarNo ratings yet
- Integral Abutment Bridge Design (Modjeski and Masters) PDFDocument56 pagesIntegral Abutment Bridge Design (Modjeski and Masters) PDFAnderson UrreaNo ratings yet
- 4000 Liter Pharma Sweed Updates AQE9kZWVQLsbjb36Document1 page4000 Liter Pharma Sweed Updates AQE9kZWVQLsbjb36belkacem kisriNo ratings yet
- Racve Itd HawleDocument2 pagesRacve Itd HawleKenan HotiNo ratings yet
- Typical Self Climber Formwork: Access Ladder With CageDocument7 pagesTypical Self Climber Formwork: Access Ladder With CageJinxian XuNo ratings yet
- Model 2-Way, Direct-Acting, Solenoid-Operated Directional Blocking Poppet Valve (740 Series)Document3 pagesModel 2-Way, Direct-Acting, Solenoid-Operated Directional Blocking Poppet Valve (740 Series)Anurag JainNo ratings yet
- Ica 19001 05 Opt 1 Rev A PDFDocument12 pagesIca 19001 05 Opt 1 Rev A PDFtayo_bNo ratings yet
- ATT III - 2. Use Internal Communication SystemsDocument9 pagesATT III - 2. Use Internal Communication Systemsedwin90276No ratings yet
- Minyu: Jaw Crusher Ms4230Document40 pagesMinyu: Jaw Crusher Ms4230ventura.curayNo ratings yet
- JK Paper Launders Annexure-1 Rev.1Document1 pageJK Paper Launders Annexure-1 Rev.1kasvikrajNo ratings yet
- Typical Plan For Construction of 2 STOREY Regular Workshop 4 CLASSROOM SHS - ResizedDocument37 pagesTypical Plan For Construction of 2 STOREY Regular Workshop 4 CLASSROOM SHS - ResizedAshley Van Goele BalubarNo ratings yet
- Turning (Lathe) - Group 2Document31 pagesTurning (Lathe) - Group 2Paul Christian GerobinNo ratings yet
- Carpentry Report - Engineering Workshop Lab - Second/2004Document10 pagesCarpentry Report - Engineering Workshop Lab - Second/2004ahm531100% (2)
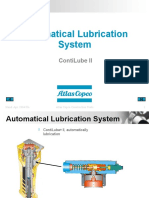
- ContiLube IIDocument17 pagesContiLube IIatakanNo ratings yet
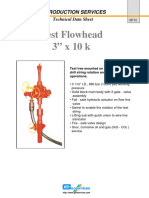
- Test Flowhead 3" X 10 K: Production ServicesDocument2 pagesTest Flowhead 3" X 10 K: Production Servicesshakouri1370_8902064No ratings yet
- Brompton Rear Hinge Bushing ReplacementDocument2 pagesBrompton Rear Hinge Bushing ReplacementLyricalSmokerNo ratings yet
- Subject: Renovation Works at Prayer Room of The Accord Home Owners AssociationDocument2 pagesSubject: Renovation Works at Prayer Room of The Accord Home Owners Associationrumnaz khanNo ratings yet
- Brosur MRBDocument15 pagesBrosur MRBTrellindo Solusi TeknikNo ratings yet
- Safe Work Method Statement For Testing & Commissioning of DX Split UnitsDocument5 pagesSafe Work Method Statement For Testing & Commissioning of DX Split Unitsvin ssNo ratings yet
- Report of Inspection, Testing & Maintenance of Standpipe SystemsDocument8 pagesReport of Inspection, Testing & Maintenance of Standpipe SystemsCubzlookNo ratings yet
- Designs and Types of Wrenches PDFDocument4 pagesDesigns and Types of Wrenches PDFRodolfo Castro Jr.No ratings yet
- MATH Timber Design and Construction MethDocument4 pagesMATH Timber Design and Construction MethJeth Verdejo RiveroNo ratings yet
- UN 5222-02 Part2 - UD-AU-000-EB-00017 PDFDocument4 pagesUN 5222-02 Part2 - UD-AU-000-EB-00017 PDFManjeet SainiNo ratings yet
- Critical Lift Plan: - Load Is Greater Than 85 Percent of Mobile Crane Rated Capacity, or Greater Than 90 Percent ofDocument6 pagesCritical Lift Plan: - Load Is Greater Than 85 Percent of Mobile Crane Rated Capacity, or Greater Than 90 Percent ofberatcansuNo ratings yet
- CTR Pillar 61037-38 MIKOMI StatusDocument2 pagesCTR Pillar 61037-38 MIKOMI StatusMuhammad UsmanNo ratings yet
- LetoffsystemsDocument109 pagesLetoffsystemsabiyNo ratings yet
- Bomba Warman 3x2Document44 pagesBomba Warman 3x2Alex ContrerasNo ratings yet
- TESCO Casing Drive SystemDocument22 pagesTESCO Casing Drive SystemJohnSmith50% (2)
- Unequal Angles... BS EN 10056-1:1999: BSI ShopDocument3 pagesUnequal Angles... BS EN 10056-1:1999: BSI ShopPrayogo Hadi SNo ratings yet
- LQ4 LQ9 Engine Manual L510016Document229 pagesLQ4 LQ9 Engine Manual L510016Kyle Dubay100% (3)
- Demolish and Extension BoQ - Supply and Installation - 141019Document3 pagesDemolish and Extension BoQ - Supply and Installation - 141019Patrick SipatelaNo ratings yet