You might also like
- Dominos Winning StrategiesDocument185 pagesDominos Winning StrategiesY Ammar IsmailNo ratings yet
- Buck 1948Document9 pagesBuck 1948Carlos Mora100% (1)
- Nfrc100a 2010Document49 pagesNfrc100a 2010Amy ShepardNo ratings yet
- 1.finite Impulse Response (FIR) FiltersDocument16 pages1.finite Impulse Response (FIR) FiltersSamet YılmazNo ratings yet
- Python Programming for Beginners Crash Course with Hands-On Exercises, Including NumPy, Pandas and MatplotlibFrom EverandPython Programming for Beginners Crash Course with Hands-On Exercises, Including NumPy, Pandas and MatplotlibNo ratings yet
- Lecture Notes (Chapter 2.3 Triple Integral)Document5 pagesLecture Notes (Chapter 2.3 Triple Integral)shinee_jayasila2080100% (1)
- Crane Company Within SingaporeDocument4 pagesCrane Company Within SingaporeRash AcidNo ratings yet
- ParaDocument5 pagesParaabhijit.mandalNo ratings yet
- Project2-S7 - 300 Ec GR II / PLC - 1 (CPU 319-3 PN/DP) / Program BlocksDocument1 pageProject2-S7 - 300 Ec GR II / PLC - 1 (CPU 319-3 PN/DP) / Program BlocksfcompartNo ratings yet
- Scaling 27676Document2 pagesScaling 27676MURLI MANOHARNo ratings yet
- Range FC (Fc4) : Totally Integrated Automation PortalDocument16 pagesRange FC (Fc4) : Totally Integrated Automation Portalfiras hamrouniNo ratings yet
- Efitech / PLC - 1 (CPU 1211C DC/DC/Rly)Document1 pageEfitech / PLC - 1 (CPU 1211C DC/DC/Rly)Antonio PassosNo ratings yet
- KITEX / Group - QE2 / QE 2 (CPU 1513-1 PN) / Program BlocksDocument19 pagesKITEX / Group - QE2 / QE 2 (CPU 1513-1 PN) / Program BlocksChimbhu SubramaniyamNo ratings yet
- Calculo LineaDocument2 pagesCalculo LineaOscar Andres Gonzalez CordobaNo ratings yet
- Hydroplantproject / PLC - 1 (Cpu 1511-1 PN) / Program Blocks: Simlogic (Fb1)Document3 pagesHydroplantproject / PLC - 1 (Cpu 1511-1 PN) / Program Blocks: Simlogic (Fb1)Rafael Sena SantanaNo ratings yet
- PID ControlDocument10 pagesPID ControlJefri Yan SipahutarNo ratings yet
- Btchuong 4Document2 pagesBtchuong 4truonghoang1998No ratings yet
- Flow - Control - 19146331 / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksDocument8 pagesFlow - Control - 19146331 / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksĐinh TháiNo ratings yet
- TCP Ip ModbusDocument8 pagesTCP Ip ModbuscarloswmerensNo ratings yet
- Regulacija: Network 1: Racunanje GreskeDocument5 pagesRegulacija: Network 1: Racunanje GreskeDraganBelosevacNo ratings yet
- VariablesDocument1 pageVariablesOscar Andres Gonzalez CordobaNo ratings yet
- 70 - FB - Tank230 (FB7105) : Totally Integrated Automation PortalDocument14 pages70 - FB - Tank230 (FB7105) : Totally Integrated Automation PortalOMiD QahqaieNo ratings yet
- Totally Integrated Automation Portal - analog FC3Document2 pagesTotally Integrated Automation Portal - analog FC3thang nguyenNo ratings yet
- PLC Tag BTVN2Document1 pagePLC Tag BTVN2Phạm Thanh BìnhNo ratings yet
- Totally Integrated Automation Portal Main ProgramDocument3 pagesTotally Integrated Automation Portal Main ProgramMladen DivacNo ratings yet
- VariablesDocument3 pagesVariablesdeybyklkNo ratings yet
- Chuong Trinh Dem San Pham Duoc Dong GoiDocument2 pagesChuong Trinh Dem San Pham Duoc Dong GoiVO XUAN NAMNo ratings yet
- Osp5000 DNCDocument2 pagesOsp5000 DNCNhân Nguyễn ĐạiNo ratings yet
- Genmed FbPIDControllerDocument3 pagesGenmed FbPIDControlleralicardozoNo ratings yet
- FT232 FT245 APIv131Document13 pagesFT232 FT245 APIv131KortnerNo ratings yet
- Settings SR345Document23 pagesSettings SR345LeandreNo ratings yet
- Banda Good / PLC - 2 (Cpu 1215C Ac/Dc/Rly)Document1 pageBanda Good / PLC - 2 (Cpu 1215C Ac/Dc/Rly)Juan PabloNo ratings yet
- Modbus register map and error codes for solar inverterDocument34 pagesModbus register map and error codes for solar inverternitinNo ratings yet
- Arduinoprogrammingr1 150417185248 Conversion Gate02Document76 pagesArduinoprogrammingr1 150417185248 Conversion Gate02reyandyNo ratings yet
- GE power relay configuration documentDocument10 pagesGE power relay configuration documentCarlos CarreraNo ratings yet
- Bit Level InstructionsDocument8 pagesBit Level InstructionsOJ ACNo ratings yet
- Design of NHR1100 Single Loop Digital Display Parameter Indicator Based OnDocument4 pagesDesign of NHR1100 Single Loop Digital Display Parameter Indicator Based OnRicardoAgredaNo ratings yet
- 2021bahar - S7-1500 - V16 / PLC - 1 (CPU 1511-1 PN) / Program BlocksDocument5 pages2021bahar - S7-1500 - V16 / PLC - 1 (CPU 1511-1 PN) / Program BlocksAnonymous CnoUFthWl0No ratings yet
- EnerVista 345settingsDocument23 pagesEnerVista 345settingsLeandreNo ratings yet
- Modbus Configuration Report SettingsDocument46 pagesModbus Configuration Report SettingsnikerNo ratings yet
- AtPlus 2nd Gen. Modbus Interface - ENDocument7 pagesAtPlus 2nd Gen. Modbus Interface - ENPiotrNo ratings yet
- Ajustes Alim Canelo - 2020Document10 pagesAjustes Alim Canelo - 2020Carlos CarreraNo ratings yet
- DR 3: Adjustment Data and Scales Parameter Channel 1Document3 pagesDR 3: Adjustment Data and Scales Parameter Channel 1Miles DamaneNo ratings yet
- Service Reset - Jungheinrich EFG425Document1 pageService Reset - Jungheinrich EFG425Folkwin LapNo ratings yet
- TCP Ip Modbus Banco de DadosDocument1 pageTCP Ip Modbus Banco de DadoscarloswmerensNo ratings yet
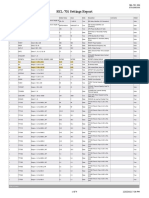
- SEL-701 Settings ReportDocument9 pagesSEL-701 Settings ReportJosé AntonioNo ratings yet
- Traffic - Lamp / PLC - 1 (CPU 1212C AC/DC/Rly) / Program Blocks: Counter - Down (Fb1)Document2 pagesTraffic - Lamp / PLC - 1 (CPU 1212C AC/DC/Rly) / Program Blocks: Counter - Down (Fb1)phong dauNo ratings yet
- AGC-4 Modbus Descriptions Software VersionDocument50 pagesAGC-4 Modbus Descriptions Software VersionJohan GantivaNo ratings yet
- PCV B 211220Document8 pagesPCV B 211220samuelNo ratings yet
- Startup (OB100)Document1 pageStartup (OB100)Mohammed Reda AitbellaNo ratings yet
- PLC Tags Examen U3Document1 pagePLC Tags Examen U3alon.ac72No ratings yet
- Direct Bilirubin: InstrumentDocument1 pageDirect Bilirubin: InstrumentEnrique DuarteNo ratings yet
- TiaDocument5 pagesTiaPiotrekBzdręgaNo ratings yet
- TABLADocument1 pageTABLAdeybyklkNo ratings yet
- Profibus Mapping For S120 Apc Epos Fb120: Application NotesDocument9 pagesProfibus Mapping For S120 Apc Epos Fb120: Application NotesAhmadNo ratings yet
- Modul BSSN d4Document12 pagesModul BSSN d4Tar JonoNo ratings yet
- SD WanDocument29 pagesSD WanДејан СенићNo ratings yet
- Mks Ct150 Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDocument2 pagesMks Ct150 Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNo ratings yet
- Modbus TCP - Cau Hinh ConnectDocument1 pageModbus TCP - Cau Hinh ConnectLê MinhNo ratings yet
- Modbus ListDocument14 pagesModbus Listgopi4444No ratings yet
- Norika WM Communication Quick ReferenceDocument1 pageNorika WM Communication Quick ReferencePhyo Phyo ZawNo ratings yet
- Craft Calculator V3 FinalDocument10 pagesCraft Calculator V3 FinalYonathan SetiantoNo ratings yet
- Nexgine Utility Lip ManualDocument26 pagesNexgine Utility Lip ManualBhola Raaz GuptaNo ratings yet
- # Question Type Accuracy: View Player DataDocument17 pages# Question Type Accuracy: View Player Dataissaaa SnackkkNo ratings yet
- Techfill BMS - CM Communication Protocol (600 Cells) B0Document6 pagesTechfill BMS - CM Communication Protocol (600 Cells) B0Firman DezaNo ratings yet
- Configuración Del DispositivoDocument3 pagesConfiguración Del DispositivoJosé ZamoraNo ratings yet
- FRABA - Absolute - Encoder / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksDocument3 pagesFRABA - Absolute - Encoder / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksAhmed YacoubNo ratings yet
- WWW - Servorepair.ca: Scroll Down To View Your Document!Document55 pagesWWW - Servorepair.ca: Scroll Down To View Your Document!Ednelson CostaNo ratings yet
- Controlling of A 3-Phased Asynchronous Motor OverDocument6 pagesControlling of A 3-Phased Asynchronous Motor OverAhmed YacoubNo ratings yet
- Manual Ixarc Ocd DPDocument48 pagesManual Ixarc Ocd DPyugie oktavianaNo ratings yet
- Fraba Absolute EncoderDocument2 pagesFraba Absolute EncoderAhmed YacoubNo ratings yet
- Toshiba SMMS-7 VRF CatalogueDocument106 pagesToshiba SMMS-7 VRF CatalogueMyo Sein67% (3)
- Uncertainty in Measurements - Lab ReportDocument4 pagesUncertainty in Measurements - Lab ReportStaniaNo ratings yet
- El 5036 V2 PDFDocument86 pagesEl 5036 V2 PDFCriss TNo ratings yet
- DE Monthly Assessment - IDocument5 pagesDE Monthly Assessment - IJay KakadiyaNo ratings yet
- SD Card Formatter 5.01 User's Manual: July 15, 2021Document11 pagesSD Card Formatter 5.01 User's Manual: July 15, 2021Alexis GutierrezNo ratings yet
- Chapter 4 1 Indefinite IntegralDocument21 pagesChapter 4 1 Indefinite IntegralMinh Huỳnh LêNo ratings yet
- Domestic Water-Supply - TheoryDocument19 pagesDomestic Water-Supply - Theoryyarzar17No ratings yet
- Chapter Arithmetic and Geometric Progressions 024005Document14 pagesChapter Arithmetic and Geometric Progressions 024005ravichandran_brNo ratings yet
- Pov Aml Threshold Tuning Qualitative Approach ProtivitiDocument5 pagesPov Aml Threshold Tuning Qualitative Approach Protivitisimha1177No ratings yet
- Chapter 8Document2 pagesChapter 8Riza Mae AlceNo ratings yet
- Intolrableboss IIMB DisplayDocument2 pagesIntolrableboss IIMB DisplayMansi ParmarNo ratings yet
- Revison 5 - Adverbs of TimeDocument50 pagesRevison 5 - Adverbs of Timeluis fernandoNo ratings yet
- ComplexDocument35 pagesComplexKetso MolapoNo ratings yet
- DLL Els Quarter 1 Week 5Document4 pagesDLL Els Quarter 1 Week 5alyssa.ballonNo ratings yet
- Evaluation of Earthquake-Induced Cracking of Embankment DamsDocument21 pagesEvaluation of Earthquake-Induced Cracking of Embankment DamsMARCOS ABRAHAM ALEJANDRO BALDOCEDA HUAYASNo ratings yet
- Laboratory Exercise Set #10 Printers General Instructions:: Lab 11.1 Backing Up An Ios Device To A PC or Mac Using ItunesDocument29 pagesLaboratory Exercise Set #10 Printers General Instructions:: Lab 11.1 Backing Up An Ios Device To A PC or Mac Using ItunesSam MadroneroNo ratings yet
- Lisa Van Krieken CVDocument1 pageLisa Van Krieken CVapi-525455549No ratings yet
- Monopolistic screening in the labor marketDocument6 pagesMonopolistic screening in the labor marketKand HroppaNo ratings yet
- Risktec Drilling Soc 0.3 PDFDocument16 pagesRisktec Drilling Soc 0.3 PDF1sNo ratings yet
- Frontal - Cortex Assess Battery FAB - ScaleDocument2 pagesFrontal - Cortex Assess Battery FAB - Scalewilliamsa01No ratings yet
- Ds 311 2 General Pre-Start Check List (B)Document4 pagesDs 311 2 General Pre-Start Check List (B)Miguel RomoNo ratings yet
- Einas Mansour - Curriculum VitaeDocument3 pagesEinas Mansour - Curriculum VitaeEinas MansourNo ratings yet
- Monika Soni PDFDocument16 pagesMonika Soni PDFdeepak guptaNo ratings yet
- Cost-Time-Resource Sheet for Rumaila Oil Field Engineering ServicesDocument13 pagesCost-Time-Resource Sheet for Rumaila Oil Field Engineering ServicesonlyikramNo ratings yet