You might also like
- Acoustic Tractor Beam: 35 Steps (With Pictures) PDFDocument38 pagesAcoustic Tractor Beam: 35 Steps (With Pictures) PDFAmirNo ratings yet
- Setting Up A Wireless Hotspot Using TP-Link TL-MR3020 Wireless N Router - AllDocument16 pagesSetting Up A Wireless Hotspot Using TP-Link TL-MR3020 Wireless N Router - AllMarcelo Kobs Kurz0% (1)
- Raspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)Document27 pagesRaspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)orangota100% (1)
- SLA 3d PrinterDocument80 pagesSLA 3d Printerbitu&piutaNo ratings yet
- Bitcoin and Lightning Network on Raspberry Pi: Running Nodes on Pi3, Pi4 and Pi ZeroFrom EverandBitcoin and Lightning Network on Raspberry Pi: Running Nodes on Pi3, Pi4 and Pi ZeroNo ratings yet
- Carving Contiguous and Fragmented Files With Object ValidationDocument12 pagesCarving Contiguous and Fragmented Files With Object ValidationpuggodNo ratings yet
- Autonomous Aerial Mapping: Team Name: Game of Drones AuthorsDocument11 pagesAutonomous Aerial Mapping: Team Name: Game of Drones AuthorsNewMANNo ratings yet
- Backpack Anti-Theft Alarm: InstructablesDocument31 pagesBackpack Anti-Theft Alarm: InstructablesPauline FraserNo ratings yet
- DIY 3D Printed Dremel CNC PDFDocument38 pagesDIY 3D Printed Dremel CNC PDFStephen OHaraNo ratings yet
- NodeMCU GPS Tracker Blynk App in IOT Platform - Hackster - Io PDFDocument7 pagesNodeMCU GPS Tracker Blynk App in IOT Platform - Hackster - Io PDFTECH IDEASNo ratings yet
- Design and Manufacture of Umanned Aerial Vehicles (UAV) Wing Structure Using Composite MaterialsDocument11 pagesDesign and Manufacture of Umanned Aerial Vehicles (UAV) Wing Structure Using Composite MaterialsPetraKrhačNo ratings yet
- IR Only Conversion For Sony CybershotDocument5 pagesIR Only Conversion For Sony CybershotSimone TunziNo ratings yet
- Building A Survival BatteryDocument12 pagesBuilding A Survival BatteryMax DemasiNo ratings yet
- Brock Technologies UAV Pneumatic Catapult BrochureDocument1 pageBrock Technologies UAV Pneumatic Catapult BrochureUAVs AustraliaNo ratings yet
- Tutorial - Arduino and SIM900 GSM Modules: Quality Device ProgrammerDocument15 pagesTutorial - Arduino and SIM900 GSM Modules: Quality Device ProgrammerLuis Flores100% (1)
- HPC Tool To See in LocksDocument2 pagesHPC Tool To See in Locksvarm1ntNo ratings yet
- How To Build Your Own Jet EngineDocument14 pagesHow To Build Your Own Jet Enginejoao carlosNo ratings yet
- Hafely Door Lock HH Catalogue Ffcat 4 1Document20 pagesHafely Door Lock HH Catalogue Ffcat 4 1Thilan SenarathneNo ratings yet
- Arduino Based Optical TachometerDocument12 pagesArduino Based Optical TachometerMarius DanilaNo ratings yet
- Onguard 2015Document56 pagesOnguard 2015Lukasz BorowiczNo ratings yet
- High-Range Wireless PowerDocument14 pagesHigh-Range Wireless PowerdewasuryantoNo ratings yet
- BDE ManualDocument20 pagesBDE ManualabortizNo ratings yet
- LaserDocument29 pagesLaserGaurav YadavNo ratings yet
- Robotic Arm 5 DOF TutorialDocument44 pagesRobotic Arm 5 DOF TutorialManish Narkhede83% (6)
- G CODE Manual BasicDocument13 pagesG CODE Manual BasicDejan StalovicNo ratings yet
- Design of CNC Machine Based Laser Engraver With Arduino UNODocument7 pagesDesign of CNC Machine Based Laser Engraver With Arduino UNOIJRASETPublicationsNo ratings yet
- Stow and Go Router Table PlanDocument3 pagesStow and Go Router Table PlanVali Postea100% (1)
- E BikeDocument58 pagesE BikeFabin Antony0% (1)
- The Floating Arm TrebuchetDocument9 pagesThe Floating Arm Trebuchetmarandan85No ratings yet
- Triton-Powered Saw TableDocument32 pagesTriton-Powered Saw Tableauger88No ratings yet
- How To Wire An Arduino Based 3 Axis CNC MachineDocument11 pagesHow To Wire An Arduino Based 3 Axis CNC MachineSetyo WidodoNo ratings yet
- DIY Arduino 3D Laser ScannerDocument8 pagesDIY Arduino 3D Laser ScannerHilman HazmiNo ratings yet
- Bouldering Wall PlansDocument5 pagesBouldering Wall PlansDennis ZarsueloNo ratings yet
- Axminster CMB115 ManualDocument24 pagesAxminster CMB115 Manualmikka26No ratings yet
- Blackmagic 3G-SDI Arduino Shield ManualDocument244 pagesBlackmagic 3G-SDI Arduino Shield ManualbopufouriaNo ratings yet
- Arduino Micro QuadcopterDocument5 pagesArduino Micro QuadcopterA Lo mejorNo ratings yet
- 3D Router When A CNC Machine Is OverkillDocument7 pages3D Router When A CNC Machine Is OverkillNehuen MapuNo ratings yet
- Hot Wire Manchine - User Manual-ENDocument41 pagesHot Wire Manchine - User Manual-ENZoliNo ratings yet
- DIY Battery Pack For Quadcopter (Recycling 18650 Cells From A Laptop)Document16 pagesDIY Battery Pack For Quadcopter (Recycling 18650 Cells From A Laptop)genmassaNo ratings yet
- Mini Bike LightDocument2 pagesMini Bike LightperacNo ratings yet
- RPi - GPIO Cheat Sheet PDFDocument4 pagesRPi - GPIO Cheat Sheet PDFadebolajo sundayNo ratings yet
- Axminster Lathe ManualDocument24 pagesAxminster Lathe ManualGary SmithNo ratings yet
- Mini CNC Milling Machine: InstructablesDocument26 pagesMini CNC Milling Machine: InstructablesMaxmore KarumamupiyoNo ratings yet
- Standalone Motion Controller DDCS V3.1 User's Guide: Shenzhen Digital Dream Numerical Technology Co., LTDDocument44 pagesStandalone Motion Controller DDCS V3.1 User's Guide: Shenzhen Digital Dream Numerical Technology Co., LTDFarhan Ashraf AliNo ratings yet
- DIY Bike Rollers PDFDocument9 pagesDIY Bike Rollers PDFEvandro MacedoNo ratings yet
- Obstacles Detection2Document10 pagesObstacles Detection2Rahul SawantNo ratings yet
- 1911 Part ListDocument1 page1911 Part ListBubo VirginianusNo ratings yet
- Arduino Uno R3 Battery TesterDocument4 pagesArduino Uno R3 Battery TesterbudituxNo ratings yet
- Blackmagic MultiView ManualDocument22 pagesBlackmagic MultiView ManualSyed Danish HasanNo ratings yet
- Arduino 3 Axis Mini Lazer Paper CutterDocument14 pagesArduino 3 Axis Mini Lazer Paper CutterMarius DanilaNo ratings yet
- Small Welder For Joining Nichrome and Nickel WiresDocument7 pagesSmall Welder For Joining Nichrome and Nickel WiresJulio_Cesar1981No ratings yet
- Wipo-Nift "Training The Trainers" Workshop On Intellectual Property RightsDocument72 pagesWipo-Nift "Training The Trainers" Workshop On Intellectual Property RightsRodion CiupercaNo ratings yet
- Quadcopters PresentationDocument20 pagesQuadcopters PresentationManikVermaNo ratings yet
- CNC DNCDocument9 pagesCNC DNCAkis CncNo ratings yet
- Nontraditional Machining Processes: Mr. D. N. PatelDocument53 pagesNontraditional Machining Processes: Mr. D. N. PatelrrameshsmitNo ratings yet
- Hovercraft Building PlansDocument3 pagesHovercraft Building Plansinfineum100% (1)
- 7 Foot Axial Flux Wind TurbineDocument25 pages7 Foot Axial Flux Wind TurbineJune BugNo ratings yet
- Upgrade Your $3 Bluetooth Module To Have HID Firmware - 11 Steps (With Pictures)Document10 pagesUpgrade Your $3 Bluetooth Module To Have HID Firmware - 11 Steps (With Pictures)husa flaviuNo ratings yet
- Small Arduino CNC - AllDocument25 pagesSmall Arduino CNC - AllAhmed Toufan JulidinataNo ratings yet
- Laser Scanning Microscope - 13 Steps (With Pictures)Document23 pagesLaser Scanning Microscope - 13 Steps (With Pictures)Anang SuryanaNo ratings yet
- Arduino and HC-12 Long Range Wireless Communication Module - HowToMechatronicsDocument25 pagesArduino and HC-12 Long Range Wireless Communication Module - HowToMechatronicsJosé ManuelNo ratings yet
- Introduction To C++Document21 pagesIntroduction To C++José ManuelNo ratings yet
- Week 2Document19 pagesWeek 2José ManuelNo ratings yet
- Week 4Document26 pagesWeek 4José ManuelNo ratings yet
- 2 UkDocument2 pages2 UkJosé ManuelNo ratings yet
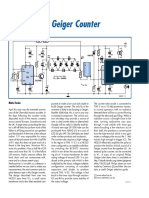
- Geiger Counter: Malte FischerDocument1 pageGeiger Counter: Malte FischerJosé Manuel100% (1)
- 1 UkDocument2 pages1 UkJosé ManuelNo ratings yet
- Week 3Document17 pagesWeek 3José ManuelNo ratings yet
- RC Servo Tester/Exerciser: Ray KingDocument2 pagesRC Servo Tester/Exerciser: Ray KingJosé ManuelNo ratings yet
- Week 1Document17 pagesWeek 1José ManuelNo ratings yet
- Increased Range For DVM: 2 V 910k 100k 20 V 1M 10k 200 V 1M 1k 2000 V 1M 100 200 Ma 0 1k 2 Ma 0 100 20 Ma 0 10 200 Ma 0 1Document1 pageIncreased Range For DVM: 2 V 910k 100k 20 V 1M 10k 200 V 1M 1k 2000 V 1M 100 200 Ma 0 1k 2 Ma 0 100 20 Ma 0 10 200 Ma 0 1José ManuelNo ratings yet
- Stepper Motor Controller: Gert BaarsDocument2 pagesStepper Motor Controller: Gert BaarsJosé ManuelNo ratings yet
- Hybrid Headphone Amp: Jeff MacaulayDocument2 pagesHybrid Headphone Amp: Jeff MacaulayJosé ManuelNo ratings yet
- Low Loss Step Down Converter: Michel FrankeDocument1 pageLow Loss Step Down Converter: Michel FrankeJosé ManuelNo ratings yet
- Amptitudes - MicrochipDocument5 pagesAmptitudes - MicrochipJosé ManuelNo ratings yet
- Universal LCD Module: Ullrich KreiensenDocument3 pagesUniversal LCD Module: Ullrich KreiensenJosé ManuelNo ratings yet
- Step-Down Converter Controller: Dirk Gehrke, Texas InstrumentsDocument2 pagesStep-Down Converter Controller: Dirk Gehrke, Texas InstrumentsJosé ManuelNo ratings yet
- Microchip Analog EbookDocument31 pagesMicrochip Analog EbookJosé ManuelNo ratings yet
- Tatad V Garcia Case DigestDocument1 pageTatad V Garcia Case DigestAlexNo ratings yet
- EMILE DURKHEIM On The Division of Labor in SocietyDocument23 pagesEMILE DURKHEIM On The Division of Labor in Societymalamati007100% (1)
- Stages of Identity: Theater Posters From The Magnes Collection (1903-1994) - Exhibition Labels (2016)Document8 pagesStages of Identity: Theater Posters From The Magnes Collection (1903-1994) - Exhibition Labels (2016)magnesmuseumNo ratings yet
- Lesson 1 and 2 - Single Entry System, Correction of ErrorsDocument8 pagesLesson 1 and 2 - Single Entry System, Correction of ErrorsThe Brain Dump PHNo ratings yet
- Unleash The Warrior WithinDocument217 pagesUnleash The Warrior WithinIbis12100% (1)
- The Meaning of The HousesDocument15 pagesThe Meaning of The HousesAnnie ToriNo ratings yet
- BA316 International Business Trade Module 3 1Document12 pagesBA316 International Business Trade Module 3 1Pamela Rose CasenioNo ratings yet
- hCCNN-Managua September 18th, 21 Full Name Darwin Francisco Siezar Aguilar Level: 2A ScoreDocument2 pageshCCNN-Managua September 18th, 21 Full Name Darwin Francisco Siezar Aguilar Level: 2A ScoreCariliz AguilarNo ratings yet
- Environmental Health and Sustainable Development in Ogoni DR Uzorka MainDocument31 pagesEnvironmental Health and Sustainable Development in Ogoni DR Uzorka MainBettyNo ratings yet
- The Impact of Waiting in LineDocument6 pagesThe Impact of Waiting in LineGustavo SantosNo ratings yet
- Art Therapy and PsychoticDocument12 pagesArt Therapy and PsychoticcacaNo ratings yet
- Nazi Germany IGCSE QuestionDocument2 pagesNazi Germany IGCSE QuestionNeema AkalaNo ratings yet
- Case Study Questions: Group NameDocument9 pagesCase Study Questions: Group NameVersha RaniNo ratings yet
- Mca in NimcetDocument31 pagesMca in NimcetAmar SarkarNo ratings yet
- SAS Motors PresentationDocument18 pagesSAS Motors PresentationAngad TractorsNo ratings yet
- Coduri PR VWDocument196 pagesCoduri PR VWAlexandru CepanNo ratings yet
- Virtual Testing of Protection Systems Using Digital Twin Technology - PaperDocument9 pagesVirtual Testing of Protection Systems Using Digital Twin Technology - PaperMiguel Alfredo Perez OrtizNo ratings yet
- List of Clients For Machine Tool ProductsDocument5 pagesList of Clients For Machine Tool ProductsShreemati WandkarNo ratings yet
- La Vida en Pobreza - Oscar Lewis Puerto Rico and The Culture ofDocument284 pagesLa Vida en Pobreza - Oscar Lewis Puerto Rico and The Culture ofManojNo ratings yet
- Charcot JointDocument8 pagesCharcot JointAtika SugiartoNo ratings yet
- IMT - Supply Chain MGMT - Session 11&12Document49 pagesIMT - Supply Chain MGMT - Session 11&12Himanish BhandariNo ratings yet
- Surat Pengenalan Fakulti FirstSolarDocument4 pagesSurat Pengenalan Fakulti FirstSolarMohd Izzat Abd GhaniNo ratings yet
- IC Restaurant Balanced Scorecard ExampleDocument1 pageIC Restaurant Balanced Scorecard Examplemuscdalife100% (1)
- Gansul 2009 MinutesDocument13 pagesGansul 2009 Minutesneter58100% (1)
- Cisco Show CommandsDocument20 pagesCisco Show CommandsNorbert OngNo ratings yet
- ĐỀ TIẾNG ANH - ÔN TUYỂN SINH 10 SỐ 02Document4 pagesĐỀ TIẾNG ANH - ÔN TUYỂN SINH 10 SỐ 02Minh ChâuNo ratings yet
- 01 Overview of StatisticsDocument33 pages01 Overview of StatisticsJohn Lewis SuguitanNo ratings yet
- Cem V90 System 001 enDocument219 pagesCem V90 System 001 enAutomation WorksNo ratings yet
- 4th Competency Mapping (Final)Document11 pages4th Competency Mapping (Final)Mitz JazNo ratings yet
- Skin Studio Powerpoint RevisedDocument8 pagesSkin Studio Powerpoint RevisedAngelo Jay MacaraegNo ratings yet