You might also like
- MAT137 Weekly GuideDocument111 pagesMAT137 Weekly GuidedanielNo ratings yet
- Set Notation Proof TechniquesDocument10 pagesSet Notation Proof TechniquesAli HedayatNo ratings yet
- Chapter 1Document4 pagesChapter 1nsavyimanajustinexcNo ratings yet
- Proofs Cheat SheetDocument6 pagesProofs Cheat SheethamzaNo ratings yet
- Notes by Dr. J. SantosDocument8 pagesNotes by Dr. J. SantosChristian LlactahuamanNo ratings yet
- Lecture 2: Strategies For ProofsDocument7 pagesLecture 2: Strategies For ProofsRahul AryanNo ratings yet
- Proof TechnologyDocument7 pagesProof TechnologyLokesh GowdaNo ratings yet
- MAT 115 Contradiction ProofDocument8 pagesMAT 115 Contradiction ProofKimondo KingNo ratings yet
- Direct Proofs and Counter ExamplesDocument14 pagesDirect Proofs and Counter ExamplesshoroukNo ratings yet
- Lecture 2Document11 pagesLecture 2The tricksterNo ratings yet
- MATH 504 - Combinatorics (Methods of Proof and DisproofDocument6 pagesMATH 504 - Combinatorics (Methods of Proof and DisproofArgie ClaroNo ratings yet
- Discrete Math ExercisesDocument6 pagesDiscrete Math ExercisesJennie Ron AblogNo ratings yet
- Proof by Contradiction (≤40 charsDocument8 pagesProof by Contradiction (≤40 charsZain Ul AbideenNo ratings yet
- Contrapositive Proof PDFDocument9 pagesContrapositive Proof PDFAngelia Claresta DorothyNo ratings yet
- MAT 115 Proving Non Conditional StmntsDocument6 pagesMAT 115 Proving Non Conditional StmntsKimondo KingNo ratings yet
- Proofs of Sets, Inequalities, and Rational NumbersDocument4 pagesProofs of Sets, Inequalities, and Rational NumbersUntung Teguh BudiantoNo ratings yet
- CS 70 Discrete Mathematics and Probability Theory Spring 2016 Rao and Walrand Note 2 1 ProofsDocument8 pagesCS 70 Discrete Mathematics and Probability Theory Spring 2016 Rao and Walrand Note 2 1 ProofsAyesha NayyerNo ratings yet
- Appendix I NCERT 12 MATHSDocument9 pagesAppendix I NCERT 12 MATHSAgam GoelNo ratings yet
- Quiz On Section 2.1 On Today Test #1 On Chapters 1, 2 Expected On 2/13 WednesdayDocument4 pagesQuiz On Section 2.1 On Today Test #1 On Chapters 1, 2 Expected On 2/13 Wednesdaygoflux pwnsNo ratings yet
- Chapter 5 - Mathematical ProofsDocument14 pagesChapter 5 - Mathematical ProofsTay SunshineNo ratings yet
- Proving Things: 1 Using and Proving Implications and EquivalencesDocument5 pagesProving Things: 1 Using and Proving Implications and EquivalenceshoalongkiemNo ratings yet
- METHODS OF PROOFSDocument9 pagesMETHODS OF PROOFSPotatoprysNo ratings yet
- ProofDocument2 pagesProofressunNo ratings yet
- Quiz On Section 2.1 On Wednesday Test #1 On Chapters 1, 2 Expected On 2/13 WednesdayDocument3 pagesQuiz On Section 2.1 On Wednesday Test #1 On Chapters 1, 2 Expected On 2/13 Wednesdaygoflux pwnsNo ratings yet
- Set TheoryDocument9 pagesSet TheoryFerl AguilarNo ratings yet
- Methods of ProofDocument18 pagesMethods of ProofMuhammad Fadhlan PerdanaNo ratings yet
- Section 3.1: Direct Proof and Counterexample 1Document7 pagesSection 3.1: Direct Proof and Counterexample 1jessicaNo ratings yet
- Proof by ContradictionDocument7 pagesProof by Contradictionapi-315354740No ratings yet
- PPT02 - Methods of ProofDocument18 pagesPPT02 - Methods of ProofDaniellaNo ratings yet
- 04 ProvingDocument3 pages04 ProvingMaica Albert BallanganNo ratings yet
- Introduction to Mathematical ProofsDocument51 pagesIntroduction to Mathematical Proofsap johnNo ratings yet
- Types of ProofDocument4 pagesTypes of ProofDhiyanti War HtpNo ratings yet
- Mathematical Proofs: Existence and Proof by ContradictionDocument31 pagesMathematical Proofs: Existence and Proof by ContradictionTesla GaneshwaraNo ratings yet
- Methods of Proof (Discrete Math)Document28 pagesMethods of Proof (Discrete Math)api-33642484No ratings yet
- Contra PositiveDocument9 pagesContra Positivehmalikn7581No ratings yet
- C C C C C C: Date: October 4, 2016Document2 pagesC C C C C C: Date: October 4, 2016John NgandweNo ratings yet
- ExtraExamples 1 6Document4 pagesExtraExamples 1 6Djun MingNo ratings yet
- Methods of proof and disproofDocument42 pagesMethods of proof and disproofMichael James A. DaligdigNo ratings yet
- Fullnotes 21Document52 pagesFullnotes 21asiyahsharif1303No ratings yet
- Math AnswerDocument4 pagesMath AnswerEual UchihaNo ratings yet
- Discrete Structure Proof Techniques (Proof By Induction, Contraposition, Contradiction, Implication)Document9 pagesDiscrete Structure Proof Techniques (Proof By Induction, Contraposition, Contradiction, Implication)pubgpure505No ratings yet
- A Guide For Making ProofsDocument11 pagesA Guide For Making Proofsgule88No ratings yet
- MA103 - Exercise 4 SolutionsDocument11 pagesMA103 - Exercise 4 SolutionsChandan VarsaniNo ratings yet
- Cs6503 Toc Unit 1 VBDocument58 pagesCs6503 Toc Unit 1 VBAppasami G100% (1)
- CSE 2213: Discrete Mathematics: Modified Slides (Based On The Source Mentioned Below)Document22 pagesCSE 2213: Discrete Mathematics: Modified Slides (Based On The Source Mentioned Below)Israat PorshiNo ratings yet
- Set ProofsDocument15 pagesSet ProofsarunguptabooksNo ratings yet
- Ignou Mca Mcs-013 Solved Assignment 2011Document15 pagesIgnou Mca Mcs-013 Solved Assignment 2011Meera Sukhesh100% (1)
- Introduction to Probability LecturesDocument267 pagesIntroduction to Probability LecturesBhatt TekendraNo ratings yet
- W8 Proofs - PDF - 2Document10 pagesW8 Proofs - PDF - 2vererarNo ratings yet
- 1 Proof by ContradictionDocument12 pages1 Proof by ContradictionCris CNo ratings yet
- DM Unit II CH 1finalDocument91 pagesDM Unit II CH 1finalKhaja AhmedNo ratings yet
- Mathematical Reasoning: Methods of ProofDocument23 pagesMathematical Reasoning: Methods of ProofAbu OUbaidaNo ratings yet
- X) P (X) - There Are Two Types ofDocument32 pagesX) P (X) - There Are Two Types ofKeshav AggarwalNo ratings yet
- Chapter 1 - 2Document11 pagesChapter 1 - 2Kyle Haunter0% (1)
- Methods of ProofDocument30 pagesMethods of ProofSurayya JabeenNo ratings yet
- BSED MATHEMATICS 2F LOGIC AND SET THEORY REPORTDocument11 pagesBSED MATHEMATICS 2F LOGIC AND SET THEORY REPORTQaillah Shane QuillaNo ratings yet
- Chapter-1.7Document11 pagesChapter-1.7Asif RahmanNo ratings yet
- What'S Culture Got To Do With It?Document34 pagesWhat'S Culture Got To Do With It?Ali HedayatNo ratings yet
- HW1 Template-2021FDocument3 pagesHW1 Template-2021FAli HedayatNo ratings yet
- Mat137 Week 3 Quiz 1 MorningDocument1 pageMat137 Week 3 Quiz 1 MorningAli HedayatNo ratings yet
- Ubc 2011 Fall Arkoh Ruby BeckyDocument113 pagesUbc 2011 Fall Arkoh Ruby BeckyAli HedayatNo ratings yet
- Euclid Contest: The Centre For Education in Mathematics and Computing Cemc - Uwaterloo.caDocument6 pagesEuclid Contest: The Centre For Education in Mathematics and Computing Cemc - Uwaterloo.caHarry HuNo ratings yet
- MAT137 Quiz3-1mDocument1 pageMAT137 Quiz3-1mAli HedayatNo ratings yet
- HW3 TemplateDocument1 pageHW3 TemplateAli HedayatNo ratings yet
- MAT137 Week 3Document12 pagesMAT137 Week 3Ali HedayatNo ratings yet
- HW3 Written - Ali HedayatDocument1 pageHW3 Written - Ali HedayatAli HedayatNo ratings yet
- Tutorial Exercise For Week 3Document1 pageTutorial Exercise For Week 3Ali HedayatNo ratings yet
- Year 7 Exam ArtDocument4 pagesYear 7 Exam ArtBarminga KamurenNo ratings yet
- Adoc - Pub - Bagaimana Motivasi Berprestasi Mendorong KeberhasiDocument18 pagesAdoc - Pub - Bagaimana Motivasi Berprestasi Mendorong KeberhasiDWIKI RIYADINo ratings yet
- Advanced Materials For Hydrogen ProductionDocument150 pagesAdvanced Materials For Hydrogen ProductionGhazanfar SheikhNo ratings yet
- Inspection & Testing Requirements Scope:: Test and Inspection PerDocument7 pagesInspection & Testing Requirements Scope:: Test and Inspection PerWael ChouchaniNo ratings yet
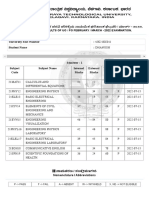
- DhanushDocument2 pagesDhanushAbhishek ANo ratings yet
- A Dating of The Deluge Is It AttainableDocument73 pagesA Dating of The Deluge Is It Attainablealipha saputraNo ratings yet
- Defining Public HealthDocument36 pagesDefining Public Healthv.shivakumarNo ratings yet
- Physically Crosslinked Closed Cell Polyolefin Foam Insulation For DuctsDocument8 pagesPhysically Crosslinked Closed Cell Polyolefin Foam Insulation For DuctsĐặng Văn SiêuNo ratings yet
- Listado 13Document436 pagesListado 13Abel Hernandez SoteloNo ratings yet
- UROP Proceedings 2015-16Document95 pagesUROP Proceedings 2015-16alex61937No ratings yet
- Stellisept - Med - Scrub MSDSDocument10 pagesStellisept - Med - Scrub MSDSChoice OrganoNo ratings yet
- Flushing and Passivation SystemDocument2 pagesFlushing and Passivation Systemmyo myint aungNo ratings yet
- đề 20Document5 pagesđề 20duongnguyenthithuy2008No ratings yet
- Manesar Case QuestionsDocument3 pagesManesar Case QuestionsShivam AroraNo ratings yet
- Cbse Ix-X Social Science 2022-23 PisDocument52 pagesCbse Ix-X Social Science 2022-23 PisAditi JaniNo ratings yet
- Lecture 12 - Mass Balance ApproachDocument18 pagesLecture 12 - Mass Balance ApproachAshhad ShafiqueNo ratings yet
- COTE Y2 V4 by Anime BoiiDocument284 pagesCOTE Y2 V4 by Anime BoiiDog DogNo ratings yet
- PK Mitomycin C in LCMSDocument13 pagesPK Mitomycin C in LCMSRuthNo ratings yet
- Phonons 1-D Linear Chain of AtomsDocument12 pagesPhonons 1-D Linear Chain of Atomsمؤيد العليNo ratings yet
- Innatek BCST-50 BarCode Scanner Supplementary ManualDocument25 pagesInnatek BCST-50 BarCode Scanner Supplementary ManualBruno MagneNo ratings yet
- Final CBoW 2020 (Dilnesaw)Document267 pagesFinal CBoW 2020 (Dilnesaw)dilnesaw teshomeNo ratings yet
- Wa0016.Document7 pagesWa0016.amjad.khan12133122No ratings yet
- FTI 2021 Tech Trends Volume AllDocument504 pagesFTI 2021 Tech Trends Volume AlljapamecNo ratings yet
- January 2005 QP - C1 EdexcelDocument20 pagesJanuary 2005 QP - C1 EdexcelAbid KhanNo ratings yet
- AI Unit 1 PDFDocument51 pagesAI Unit 1 PDFAshishNo ratings yet
- D4643Document5 pagesD4643Ruddy EspejoNo ratings yet
- Statistics For Biology and Health: M. Gail K. Krickeberg J. M. Samet A. Tsiatis W. WongDocument579 pagesStatistics For Biology and Health: M. Gail K. Krickeberg J. M. Samet A. Tsiatis W. WongViníciusSeixasNo ratings yet
- Ilham Shalabi, Imam Muhammad Bin Saud Islamic UniversityDocument20 pagesIlham Shalabi, Imam Muhammad Bin Saud Islamic Universityaron victoryNo ratings yet
- How To Comply With NADCAP AC7114 For LED UV LampsDocument4 pagesHow To Comply With NADCAP AC7114 For LED UV LampsRaistlin1No ratings yet
- FAO Fisheries & Aquaculture - Cultured Aquatic Species Information Programme - Penaeus Vannamei (Boone, 1931)Document14 pagesFAO Fisheries & Aquaculture - Cultured Aquatic Species Information Programme - Penaeus Vannamei (Boone, 1931)Dalis FaNo ratings yet
- Summary: Atomic Habits by James Clear: An Easy & Proven Way to Build Good Habits & Break Bad OnesFrom EverandSummary: Atomic Habits by James Clear: An Easy & Proven Way to Build Good Habits & Break Bad OnesRating: 5 out of 5 stars5/5 (1633)
- Can't Hurt Me by David Goggins - Book Summary: Master Your Mind and Defy the OddsFrom EverandCan't Hurt Me by David Goggins - Book Summary: Master Your Mind and Defy the OddsRating: 4.5 out of 5 stars4.5/5 (382)
- Summary of 12 Rules for Life: An Antidote to ChaosFrom EverandSummary of 12 Rules for Life: An Antidote to ChaosRating: 4.5 out of 5 stars4.5/5 (294)
- The Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessFrom EverandThe Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessRating: 5 out of 5 stars5/5 (456)
- The One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsFrom EverandThe One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsRating: 4.5 out of 5 stars4.5/5 (708)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaFrom EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaRating: 4.5 out of 5 stars4.5/5 (266)
- Tiny Habits by BJ Fogg - Book Summary: The Small Changes That Change EverythingFrom EverandTiny Habits by BJ Fogg - Book Summary: The Small Changes That Change EverythingRating: 4.5 out of 5 stars4.5/5 (110)
- Summary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsFrom EverandSummary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsNo ratings yet
- Summary of Slow Productivity by Cal Newport: The Lost Art of Accomplishment Without BurnoutFrom EverandSummary of Slow Productivity by Cal Newport: The Lost Art of Accomplishment Without BurnoutRating: 1 out of 5 stars1/5 (1)
- Essentialism by Greg McKeown - Book Summary: The Disciplined Pursuit of LessFrom EverandEssentialism by Greg McKeown - Book Summary: The Disciplined Pursuit of LessRating: 4.5 out of 5 stars4.5/5 (187)
- Summary of The Anxious Generation by Jonathan Haidt: How the Great Rewiring of Childhood Is Causing an Epidemic of Mental IllnessFrom EverandSummary of The Anxious Generation by Jonathan Haidt: How the Great Rewiring of Childhood Is Causing an Epidemic of Mental IllnessNo ratings yet
- The War of Art by Steven Pressfield - Book Summary: Break Through The Blocks And Win Your Inner Creative BattlesFrom EverandThe War of Art by Steven Pressfield - Book Summary: Break Through The Blocks And Win Your Inner Creative BattlesRating: 4.5 out of 5 stars4.5/5 (273)
- How Not to Die by Michael Greger MD, Gene Stone - Book Summary: Discover the Foods Scientifically Proven to Prevent and Reverse DiseaseFrom EverandHow Not to Die by Michael Greger MD, Gene Stone - Book Summary: Discover the Foods Scientifically Proven to Prevent and Reverse DiseaseRating: 4.5 out of 5 stars4.5/5 (83)
- How To Win Friends and Influence People by Dale Carnegie - Book SummaryFrom EverandHow To Win Friends and Influence People by Dale Carnegie - Book SummaryRating: 5 out of 5 stars5/5 (555)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessFrom EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessRating: 4.5 out of 5 stars4.5/5 (327)
- Steal Like an Artist by Austin Kleon - Book Summary: 10 Things Nobody Told You About Being CreativeFrom EverandSteal Like an Artist by Austin Kleon - Book Summary: 10 Things Nobody Told You About Being CreativeRating: 4.5 out of 5 stars4.5/5 (128)
- Psycho-Cybernetics by Maxwell Maltz - Book SummaryFrom EverandPsycho-Cybernetics by Maxwell Maltz - Book SummaryRating: 4.5 out of 5 stars4.5/5 (91)
- Summary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionFrom EverandSummary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionNo ratings yet
- Book Summary of The Subtle Art of Not Giving a F*ck by Mark MansonFrom EverandBook Summary of The Subtle Art of Not Giving a F*ck by Mark MansonRating: 4.5 out of 5 stars4.5/5 (577)
- Summary of Atomic Habits by James ClearFrom EverandSummary of Atomic Habits by James ClearRating: 5 out of 5 stars5/5 (168)
- Summary, Analysis, and Review of Daniel Kahneman's Thinking, Fast and SlowFrom EverandSummary, Analysis, and Review of Daniel Kahneman's Thinking, Fast and SlowRating: 3.5 out of 5 stars3.5/5 (2)
- Designing Your Life by Bill Burnett, Dave Evans - Book Summary: How to Build a Well-Lived, Joyful LifeFrom EverandDesigning Your Life by Bill Burnett, Dave Evans - Book Summary: How to Build a Well-Lived, Joyful LifeRating: 4.5 out of 5 stars4.5/5 (61)
- Sell or Be Sold by Grant Cardone - Book Summary: How to Get Your Way in Business and in LifeFrom EverandSell or Be Sold by Grant Cardone - Book Summary: How to Get Your Way in Business and in LifeRating: 4.5 out of 5 stars4.5/5 (86)
- Blink by Malcolm Gladwell - Book Summary: The Power of Thinking Without ThinkingFrom EverandBlink by Malcolm Gladwell - Book Summary: The Power of Thinking Without ThinkingRating: 4.5 out of 5 stars4.5/5 (114)
- Summary of Bad Therapy by Abigail Shrier: Why the Kids Aren't Growing UpFrom EverandSummary of Bad Therapy by Abigail Shrier: Why the Kids Aren't Growing UpRating: 5 out of 5 stars5/5 (1)
- Summary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursFrom EverandSummary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursNo ratings yet
- Summary of It's Not You by Ramani Durvasula: Identifying and Healing from Narcissistic PeopleFrom EverandSummary of It's Not You by Ramani Durvasula: Identifying and Healing from Narcissistic PeopleNo ratings yet
- Summary of Some People Need Killing by Patricia Evangelista:A Memoir of Murder in My CountryFrom EverandSummary of Some People Need Killing by Patricia Evangelista:A Memoir of Murder in My CountryNo ratings yet