You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- S1/2 Regularization Methods and Fixed Point Algorithms for Affine Rank MinimizationDocument28 pagesS1/2 Regularization Methods and Fixed Point Algorithms for Affine Rank MinimizationVanidevi ManiNo ratings yet
- A Parametric Augmented Lagrangian Algorithm For Real-Time Economic NMPCDocument6 pagesA Parametric Augmented Lagrangian Algorithm For Real-Time Economic NMPCABET DTETINo ratings yet
- Altro IrosDocument6 pagesAltro IrosvoyageamarsNo ratings yet
- Control of ToysDocument6 pagesControl of ToysYessica RosasNo ratings yet
- RoboticsDocument7 pagesRoboticsfggdgNo ratings yet
- Mobility Management in CellularDocument18 pagesMobility Management in CellularLeur SenacheNo ratings yet
- Optimization Based Full Body Control For The Atlas RobotDocument8 pagesOptimization Based Full Body Control For The Atlas Robot曾龙No ratings yet
- Adaptive Affinity Propagation ClusteringDocument6 pagesAdaptive Affinity Propagation ClusteringPrathamesh PawarNo ratings yet
- Perceptron Mistake BoundDocument10 pagesPerceptron Mistake BoundIsmael KaïssyNo ratings yet
- Interior-Point Methods in Model Predictive Control: Stephen WrightDocument30 pagesInterior-Point Methods in Model Predictive Control: Stephen WrightIngole DeepakNo ratings yet
- Obstacle Avoidance For Kinematically Redundant ManDocument7 pagesObstacle Avoidance For Kinematically Redundant Manhuynh nguyen dinhNo ratings yet
- Application1_QFTDocument22 pagesApplication1_QFTArijit BoseNo ratings yet
- Algoritmo SQPDocument17 pagesAlgoritmo SQPGeno KronosNo ratings yet
- An Introduction To Quantum Annealing: Diego de Falco and Dario TamascelliDocument22 pagesAn Introduction To Quantum Annealing: Diego de Falco and Dario TamascelliKithminNo ratings yet
- Amsj 2023 N01 05Document17 pagesAmsj 2023 N01 05ntuneskiNo ratings yet
- 2 Denis Mosconi - RevisadoDocument8 pages2 Denis Mosconi - RevisadoDenis MosconiNo ratings yet
- Optimal-Power-Flow-Report by Debasish ChoudhuryDocument29 pagesOptimal-Power-Flow-Report by Debasish ChoudhuryDebasish ChoudhuryNo ratings yet
- A Quantum Approximate Optimization AlgorithmDocument16 pagesA Quantum Approximate Optimization AlgorithmBenjamin FranklinNo ratings yet
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDocument5 pagesFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanNo ratings yet
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDocument5 pagesFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanNo ratings yet
- Dynamic ProgrammingDocument28 pagesDynamic ProgrammingAbdallahi SidiNo ratings yet
- Sequential Monte Carlo Methods for Bayesian InferenceDocument6 pagesSequential Monte Carlo Methods for Bayesian Inferencememex1No ratings yet
- System Modeling Using Markov Chain and Matlab PDFDocument20 pagesSystem Modeling Using Markov Chain and Matlab PDFNazer HdaifehNo ratings yet
- Nonlinear Programming Based Sliding Mode Control of An Inverted PendulumDocument5 pagesNonlinear Programming Based Sliding Mode Control of An Inverted Pendulumvirus101No ratings yet
- Optimal Control TheoryDocument28 pagesOptimal Control TheoryDaniel WangNo ratings yet
- Constrained Optimization Solving Sample Average Aproximation CCPDocument32 pagesConstrained Optimization Solving Sample Average Aproximation CCPjmcfavzlrmywqrkgsrNo ratings yet
- Time Optimal Return of A Dynamic ObjectDocument6 pagesTime Optimal Return of A Dynamic ObjectAleksandr KoshelevNo ratings yet
- Improved Filtering-Smoothing Algorithm For GPS Positioning: Yi Cao, Xuchu MaoDocument5 pagesImproved Filtering-Smoothing Algorithm For GPS Positioning: Yi Cao, Xuchu MaoarashNo ratings yet
- Trajectory Control: T) Contains Centrifugal, Coriolis, and Gravitational Forces. TheDocument20 pagesTrajectory Control: T) Contains Centrifugal, Coriolis, and Gravitational Forces. TheCarlitos FerNo ratings yet
- Optimal Coordination of Overcurrent Relays using Simplex MethodDocument4 pagesOptimal Coordination of Overcurrent Relays using Simplex MethodSonal AggarwalNo ratings yet
- Examples of Adaptive MCMCDocument28 pagesExamples of Adaptive MCMCPutra ManggalaNo ratings yet
- GPS in Kalman FilterDocument5 pagesGPS in Kalman FilterChamil GomesNo ratings yet
- A Qubo Formulation of Minimum Multicut Problem Instances in Trees For D-Wave Quantum AnnealersDocument12 pagesA Qubo Formulation of Minimum Multicut Problem Instances in Trees For D-Wave Quantum AnnealersRodrigoNo ratings yet
- 15467d0b1209f60 EkDocument5 pages15467d0b1209f60 EkAlireza AlmasNo ratings yet
- Ecc09-Ctrl MatchingDocument6 pagesEcc09-Ctrl MatchingluzpachecoblNo ratings yet
- Hybrid LQ-Optimization Using Dynamic Programming: V. Azhmyakov, R. Galvan-Guerra, and M. EgerstedtDocument9 pagesHybrid LQ-Optimization Using Dynamic Programming: V. Azhmyakov, R. Galvan-Guerra, and M. EgerstedtBetaSolDelEsteNo ratings yet
- FOPDT Model CharacterizationDocument6 pagesFOPDT Model CharacterizationHugo EGNo ratings yet
- Markov Chain Monte Carlo and Variational Inference: Bridging The GapDocument9 pagesMarkov Chain Monte Carlo and Variational Inference: Bridging The GapnothardNo ratings yet
- Article 23Document6 pagesArticle 23hk germanNo ratings yet
- Model-Free RL for Minimal-Cost Variance ControlDocument6 pagesModel-Free RL for Minimal-Cost Variance ControlVrushabh DongeNo ratings yet
- NP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Document29 pagesNP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Aleksandr TerranovaNo ratings yet
- Convergence of the generalized-α scheme for constrained mechanical systemsDocument18 pagesConvergence of the generalized-α scheme for constrained mechanical systemsCesar HernandezNo ratings yet
- Optimization Is Everywhere: Some Motivation Examples From RoboticsDocument48 pagesOptimization Is Everywhere: Some Motivation Examples From RoboticsRudnei BarbosaNo ratings yet
- The Inertial Relaxed Algorithm With Armijo-Type Line Search For Solving Multiple-Sets Split Feasibility ProblemDocument18 pagesThe Inertial Relaxed Algorithm With Armijo-Type Line Search For Solving Multiple-Sets Split Feasibility ProblemCarlos TavaresNo ratings yet
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocument9 pagesLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalNo ratings yet
- CIR CalibrationDocument8 pagesCIR CalibrationNicolas Lefevre-LaumonierNo ratings yet
- E08 Planning PDFDocument1 pageE08 Planning PDFPraveen D JadhavNo ratings yet
- Optimization, Learning, and Games With Predictable SequencesDocument22 pagesOptimization, Learning, and Games With Predictable SequencesIrwan Adhi PrasetyaNo ratings yet
- Asymptotically Optimal Stabilising Quadratic Control An Inverted PendulumDocument10 pagesAsymptotically Optimal Stabilising Quadratic Control An Inverted PendulumKuldeep KumarNo ratings yet
- Robotics2 20.06.05Document9 pagesRobotics2 20.06.05Logon WolNo ratings yet
- Abstract Interpretation with Ellipsoids and Conic ExtrapolationDocument19 pagesAbstract Interpretation with Ellipsoids and Conic ExtrapolationWalter HuNo ratings yet
- A Binary Percentile Sin-Cosine Optimisation Algorithm Applied To The Set Covering ProblemDocument11 pagesA Binary Percentile Sin-Cosine Optimisation Algorithm Applied To The Set Covering ProblemSrini vasNo ratings yet
- Control of Uncertain Robot ManipulatorsDocument11 pagesControl of Uncertain Robot ManipulatorsVikNo ratings yet
- Design FrequencyDocument5 pagesDesign FrequencyGustavo SánchezNo ratings yet
- Quantization of Discrete Probability Distributions: Qualcomm Inc. 5775 Morehouse Drive, San Diego, CA 92121Document6 pagesQuantization of Discrete Probability Distributions: Qualcomm Inc. 5775 Morehouse Drive, San Diego, CA 92121Anonymous BWVVQpxNo ratings yet
- O Q V C D R L: Ptimizing Uantum Ariational Ircuits With EEP Einforcement EarningDocument8 pagesO Q V C D R L: Ptimizing Uantum Ariational Ircuits With EEP Einforcement EarninghaptakNo ratings yet
- Chattering Free Sliding Mode Control in Magnetic Levitation SystemDocument7 pagesChattering Free Sliding Mode Control in Magnetic Levitation SystemBhaskar BiswasNo ratings yet
- L 293 DDocument21 pagesL 293 DAtep PrajaNo ratings yet
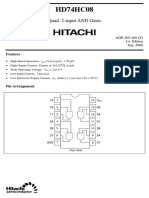
- HD74HC08: Quad. 2-Input AND GatesDocument6 pagesHD74HC08: Quad. 2-Input AND GatespzkrmaNo ratings yet
- 4N25, 4N26, 4N27, 4N28: Vishay SemiconductorsDocument7 pages4N25, 4N26, 4N27, 4N28: Vishay SemiconductorsRichie MartinezNo ratings yet
- CD 4067 BDocument18 pagesCD 4067 Bnguyentan_dat212No ratings yet
- Avr C User ManualDocument77 pagesAvr C User ManualpzkrmaNo ratings yet
- Maximum Capacity.: ME 4710 Motion and Control Saturation, Pre-Filters, Motion Trajectories and FeedforwardDocument3 pagesMaximum Capacity.: ME 4710 Motion and Control Saturation, Pre-Filters, Motion Trajectories and FeedforwardpzkrmaNo ratings yet
- Xiao Et Al - 2015 - Finite-Time Attitude Tracking of Spacecraft With Fault-Tolerant CapabilityDocument13 pagesXiao Et Al - 2015 - Finite-Time Attitude Tracking of Spacecraft With Fault-Tolerant CapabilitypzkrmaNo ratings yet
- What Electric Flux Through a Closed Surface Tells Us About Enclosed ChargeDocument7 pagesWhat Electric Flux Through a Closed Surface Tells Us About Enclosed ChargepzkrmaNo ratings yet
- McKenzie - 2001 - Writing Your Curriculum Vitae PDFDocument5 pagesMcKenzie - 2001 - Writing Your Curriculum Vitae PDFpzkrmaNo ratings yet
- QuaternionDocument19 pagesQuaternionnothardNo ratings yet
- RotationDocument9 pagesRotationpzkrmaNo ratings yet
- Dual-Quaternion Based Fault-Tolerant Control For Spacecraft Formation FlyinDocument8 pagesDual-Quaternion Based Fault-Tolerant Control For Spacecraft Formation FlyinpzkrmaNo ratings yet
- Spacecraft Formation Flying Control Using Sliding ModeDocument18 pagesSpacecraft Formation Flying Control Using Sliding ModepzkrmaNo ratings yet
- An Introduction To Set TheoryDocument119 pagesAn Introduction To Set TheoryAndrew BrownNo ratings yet
- CivilEngineering Syllabus - R14 PDFDocument137 pagesCivilEngineering Syllabus - R14 PDFBhanu Prakash PagoluNo ratings yet
- Robotic Assembly of Threaded Fasteners in A Non-Structured EnvironmentDocument15 pagesRobotic Assembly of Threaded Fasteners in A Non-Structured EnvironmentPolco-SwapnilNo ratings yet
- Grade 11 ABM and STEM ExamDocument9 pagesGrade 11 ABM and STEM ExamkeyedNo ratings yet
- CE 3220 Quiz 2 2nd Sem S.Y. 2020 2021Document3 pagesCE 3220 Quiz 2 2nd Sem S.Y. 2020 2021JasNo ratings yet
- Role of computers in streamlining product developmentDocument10 pagesRole of computers in streamlining product developmentssdeepthiNo ratings yet
- Factoring Perfect Square TrinomialsDocument2 pagesFactoring Perfect Square TrinomialsOrpelita RomeroNo ratings yet
- RNG K-Epsilon Model - CFD-Wiki, The Free CFD ReferenceDocument3 pagesRNG K-Epsilon Model - CFD-Wiki, The Free CFD Referencecoolth2No ratings yet
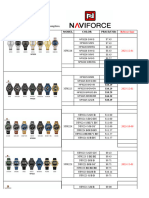
- NAVIFORCE Watch Catalogue in USD - Updated in 20240104Document47 pagesNAVIFORCE Watch Catalogue in USD - Updated in 20240104Perez PerezNo ratings yet
- A-1. Limits Intuitive Intro - AnswesDocument4 pagesA-1. Limits Intuitive Intro - AnswesBowman DicksonNo ratings yet
- 9709 w15 Ms 42Document7 pages9709 w15 Ms 42yuke kristinaNo ratings yet
- 4403 - Tugas 2 - Matematika Rekayasa IDocument2 pages4403 - Tugas 2 - Matematika Rekayasa IKharisma NugrahaNo ratings yet
- Advance C++Document463 pagesAdvance C++api-3738664100% (7)
- Computer Applications in MPE 3Document17 pagesComputer Applications in MPE 3Mahmoud samahaNo ratings yet
- Kelvin Temperature Scale & Types of ThermometersDocument3 pagesKelvin Temperature Scale & Types of ThermometersAshok PradhanNo ratings yet
- 91985v00 Mazda User Story FinalDocument2 pages91985v00 Mazda User Story Finalopek161No ratings yet
- A1AG12ADocument3 pagesA1AG12AAnonymous RzU94z100% (1)
- Test3 ProblemBank Fa22Document7 pagesTest3 ProblemBank Fa22Pedro TNo ratings yet
- The Politics of Mathematics Education in The US: Dominant and Counter Agendas Eric GutsteinDocument45 pagesThe Politics of Mathematics Education in The US: Dominant and Counter Agendas Eric Gutsteindavisfc50No ratings yet
- Use of Laboratory Log BooksDocument2 pagesUse of Laboratory Log BookshamoodNo ratings yet
- Practice ProblemsDocument4 pagesPractice ProblemsPalash dasNo ratings yet
- Handbook On Dress and Cloak Cutting 1884Document68 pagesHandbook On Dress and Cloak Cutting 1884linNo ratings yet
- I-Day 35Document3 pagesI-Day 35Rainman InsanityNo ratings yet
- Deep Learning Linear ModelsDocument49 pagesDeep Learning Linear Modelsthecoolguy96No ratings yet
- Summative Test in General MathematicsDocument4 pagesSummative Test in General MathematicsSam SamNo ratings yet
- Form 4 - Physics ExercisesDocument9 pagesForm 4 - Physics Exercisesnik mohamad solehin100% (3)
- Amc 8 2019Document10 pagesAmc 8 2019Madhu Mohan ChandranNo ratings yet
- Quezon Naguilian, IsabelaDocument2 pagesQuezon Naguilian, IsabelaYvette Marie Yaneza NicolasNo ratings yet
- 2 - SHELL281 - Creating A Preintegrated General Shell SectionDocument3 pages2 - SHELL281 - Creating A Preintegrated General Shell SectionArtero96No ratings yet
- Diction Exercises For 'B' WordsDocument4 pagesDiction Exercises For 'B' WordsBianca ConstantinNo ratings yet
- 037 044 MSM Se C1M1L5 667372Document8 pages037 044 MSM Se C1M1L5 667372Mina MalakNo ratings yet