You might also like
- Face Recognition Using PCADocument23 pagesFace Recognition Using PCArajali gintingNo ratings yet
- Maths PCADocument28 pagesMaths PCAMadhukar SinghNo ratings yet
- Pca TutorialDocument27 pagesPca TutorialGregory A Perdomo PNo ratings yet
- Variance and Standard DeviationDocument15 pagesVariance and Standard DeviationSrikirupa V Muraly100% (3)
- CHAPTER 1 Descriptive StatisticsDocument5 pagesCHAPTER 1 Descriptive StatisticsOana Şi CosminNo ratings yet
- Basic Anova PDFDocument6 pagesBasic Anova PDFEmmanuel Jimenez-Bacud, CSE-Professional,BA-MA Pol SciNo ratings yet
- Robust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Document8 pagesRobust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Robert PetersonNo ratings yet
- Lecture 4 Measure of Central Tendency Ungrouped Freq DistDocument28 pagesLecture 4 Measure of Central Tendency Ungrouped Freq DistGeckoNo ratings yet
- Statistics Lecture Course 2015-2016Document67 pagesStatistics Lecture Course 2015-2016hohoNo ratings yet
- Chapter 02Document40 pagesChapter 02徐郁真No ratings yet
- Descriptive Stats: Mean, Median, Mode, VarianceDocument17 pagesDescriptive Stats: Mean, Median, Mode, VarianceRobel MetikuNo ratings yet
- 807 2readyDocument15 pages807 2readysalarNo ratings yet
- Data Notes For IN3Document66 pagesData Notes For IN3Lyse NdifoNo ratings yet
- StatisticsDocument211 pagesStatisticsHasan Hüseyin Çakır100% (6)
- Describing Data: Centre Mean Is The Technical Term For What Most People Call An Average. in Statistics, "Average"Document4 pagesDescribing Data: Centre Mean Is The Technical Term For What Most People Call An Average. in Statistics, "Average"Shane LambertNo ratings yet
- Instructions For Chapter 3 Prepared by Dr. Guru-Gharana: Terminology and ConventionsDocument11 pagesInstructions For Chapter 3 Prepared by Dr. Guru-Gharana: Terminology and ConventionsLou RawlsNo ratings yet
- Chapter 4-1Document46 pagesChapter 4-1Shahzaib SalmanNo ratings yet
- Measures of Central Tendency: Mean, Mode, Median: Soumendra RoyDocument34 pagesMeasures of Central Tendency: Mean, Mode, Median: Soumendra Roybapparoy100% (1)
- Standard Deviation and Standard ErrorDocument5 pagesStandard Deviation and Standard Errordeepshikha.sNo ratings yet
- AnovaDocument6 pagesAnovaHongYu HuiNo ratings yet
- Measures of Central TendencyDocument10 pagesMeasures of Central TendencyJun PontiverosNo ratings yet
- Lesson Note 5Document13 pagesLesson Note 5Miftah 67No ratings yet
- ClusteringDocument30 pagesClusteringTrí Tuyên LụcNo ratings yet
- Chapter 1 Introduction The Teaching of Theory (3 Hours) ObjectiveDocument32 pagesChapter 1 Introduction The Teaching of Theory (3 Hours) Objectiveapi-3728690100% (1)
- Measurement of VariabilityDocument11 pagesMeasurement of VariabilitykaryawanenkaNo ratings yet
- MODULE 3 - Data ManagementDocument21 pagesMODULE 3 - Data ManagementCIELICA BURCANo ratings yet
- Summarising and Analysing DataDocument36 pagesSummarising and Analysing DataRomail QaziNo ratings yet
- 2.2 Unit-DspDocument63 pages2.2 Unit-Dspsuryashiva422No ratings yet
- One and Two Way ANOVADocument11 pagesOne and Two Way ANOVADave MillingtonNo ratings yet
- Bstat 2Document14 pagesBstat 2Mamun RashidNo ratings yet
- Getting To Know Your Data: 2.1 ExercisesDocument8 pagesGetting To Know Your Data: 2.1 Exercisesbilkeralle100% (1)
- Standard DeviationDocument9 pagesStandard DeviationHarika KalluriNo ratings yet
- Research Methodology-Exam-2Document21 pagesResearch Methodology-Exam-2Tuyisenge TheonesteNo ratings yet
- Click To Add Text Dr. Cemre Erciyes: Soc 2003 Statistical Methods and Computer Applications in Social Sciences 18/19Document69 pagesClick To Add Text Dr. Cemre Erciyes: Soc 2003 Statistical Methods and Computer Applications in Social Sciences 18/19Jade Cemre ErciyesNo ratings yet
- Measures of Spread PDFDocument11 pagesMeasures of Spread PDFwolfretonmathsNo ratings yet
- 07 Box Plots, Variance and Standard DeviationDocument5 pages07 Box Plots, Variance and Standard DeviationAlex ChildsNo ratings yet
- Statistics 1Document97 pagesStatistics 1BJ TiewNo ratings yet
- The Idiomatic Programmer - Statistics PrimerDocument44 pagesThe Idiomatic Programmer - Statistics PrimerssignnNo ratings yet
- StatisticsDocument18 pagesStatisticsMundu MustafaNo ratings yet
- R for Advanced StatisticsDocument259 pagesR for Advanced StatisticsVelmar Alcano LumantaoNo ratings yet
- Basic StatisticsDocument73 pagesBasic Statisticsartee_aggrawal4312100% (2)
- Measure of Central TendancyDocument14 pagesMeasure of Central TendancyZamiyr MuthoniNo ratings yet
- Safari - 23-Mar-2019 at 1:49 PMDocument1 pageSafari - 23-Mar-2019 at 1:49 PMRakesh ChoNo ratings yet
- ProblemsDocument22 pagesProblemsSam LankaNo ratings yet
- Solutions To II Unit Exercises From KamberDocument16 pagesSolutions To II Unit Exercises From Kamberjyothibellaryv83% (42)
- Data Analysis - Statistics-021216 - NH (Compatibility Mode)Document8 pagesData Analysis - Statistics-021216 - NH (Compatibility Mode)Jonathan JoeNo ratings yet
- ECMT1020: Introduction To Econometrics Tutorial Questions, Week 3Document3 pagesECMT1020: Introduction To Econometrics Tutorial Questions, Week 3Rainie XuNo ratings yet
- 4 - Statistik DeskriptifDocument33 pages4 - Statistik DeskriptifDhe NurNo ratings yet
- Lec 1Document54 pagesLec 1Jayveer SinghNo ratings yet
- LU-3-Descriptive-Statistics-in-SPSSDocument60 pagesLU-3-Descriptive-Statistics-in-SPSSKristhel Jane Roxas NicdaoNo ratings yet
- Exercise Lesson 4,5,6Document23 pagesExercise Lesson 4,5,6mahmud_aNo ratings yet
- Mean Median ModeDocument10 pagesMean Median ModeEprinthousespNo ratings yet
- PRACTICAL RESEARCH: DATA ANALYSIS GUIDEDocument8 pagesPRACTICAL RESEARCH: DATA ANALYSIS GUIDERose Vee PaynoNo ratings yet
- Calculating the MeanDocument4 pagesCalculating the MeanSteward john Dela cruzNo ratings yet
- HW 03 SolDocument9 pagesHW 03 SolfdfNo ratings yet
- Error and Uncertainty: General Statistical PrinciplesDocument8 pagesError and Uncertainty: General Statistical Principlesdéborah_rosalesNo ratings yet
- Understanding StatisticsDocument23 pagesUnderstanding StatisticsDeepti BhoknalNo ratings yet
- Business Analytics: Describing The Distribution of A Single VariableDocument58 pagesBusiness Analytics: Describing The Distribution of A Single VariableQuỳnh Anh NguyễnNo ratings yet
- SEVIRI Instrument Design and PerformanceDocument10 pagesSEVIRI Instrument Design and PerformanceMd CassimNo ratings yet
- IPSL Boot Camp Part 5: CDO and NCO: 1 Climate Data OperatorsDocument10 pagesIPSL Boot Camp Part 5: CDO and NCO: 1 Climate Data OperatorsMd CassimNo ratings yet
- A Procedure For The Classification of Synoptic Weather Maps From G R I D D E D Atmospheric Pressure Surface DataDocument14 pagesA Procedure For The Classification of Synoptic Weather Maps From G R I D D E D Atmospheric Pressure Surface DataMd CassimNo ratings yet
- Walk-In Interview For Project Associate-I/JRF in A Department of Science and Technology ProjectDocument1 pageWalk-In Interview For Project Associate-I/JRF in A Department of Science and Technology ProjectMd CassimNo ratings yet
- 7th International Verification Methods Workshop: WWRP/WGNE Joint Working Group On Forecast Verification ResearchDocument4 pages7th International Verification Methods Workshop: WWRP/WGNE Joint Working Group On Forecast Verification ResearchMd CassimNo ratings yet
- Advertisement For Multiple Positions at CER and EALDocument2 pagesAdvertisement For Multiple Positions at CER and EALMd CassimNo ratings yet
- Install WAsP software guideDocument2 pagesInstall WAsP software guideomar aminNo ratings yet
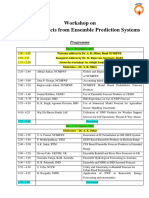
- Workshop On Use of Products From Ensemble Prediction SystemsDocument2 pagesWorkshop On Use of Products From Ensemble Prediction SystemsMd CassimNo ratings yet
- Advisory & Transaction Services: Corporate Real Estate Team OverviewDocument5 pagesAdvisory & Transaction Services: Corporate Real Estate Team OverviewMd CassimNo ratings yet
- Wind Power Forecasting Error Distributions: An International ComparisonDocument9 pagesWind Power Forecasting Error Distributions: An International ComparisonMd CassimNo ratings yet
- Stepwise Regression: Forward (Step-Up) SelectionDocument7 pagesStepwise Regression: Forward (Step-Up) SelectionMd CassimNo ratings yet
- LTI System SuperpositionDocument7 pagesLTI System SuperpositionMd CassimNo ratings yet
- Node Method and Circuit Concept Test Muddiest PointsDocument2 pagesNode Method and Circuit Concept Test Muddiest PointsMd CassimNo ratings yet
- Package Svglite': February 20, 2021Document8 pagesPackage Svglite': February 20, 2021Md CassimNo ratings yet
- India Energy Climate Policy EbingerDocument66 pagesIndia Energy Climate Policy EbingerKrishna Chaithanya Reddy PolamNo ratings yet
- RC Circuit Step Response Differential EquationDocument7 pagesRC Circuit Step Response Differential EquationMd CassimNo ratings yet
- s05 CgsDocument6 pagess05 CgsMd CassimNo ratings yet
- What Is A Model? Concept TestDocument6 pagesWhat Is A Model? Concept TestMd CassimNo ratings yet
- Lecture S3 Muddiest Points: General CommentsDocument3 pagesLecture S3 Muddiest Points: General CommentsMd CassimNo ratings yet
- Kirchhoff's Current Law Node Method EquationDocument5 pagesKirchhoff's Current Law Node Method EquationMd CassimNo ratings yet
- English in Competitive ExaminationDocument3 pagesEnglish in Competitive Examinationtijub0% (1)
- Battery Modeling CircumstancesDocument2 pagesBattery Modeling CircumstancesMd CassimNo ratings yet
- Lecture S1 Muddiest Points: General CommentsDocument3 pagesLecture S1 Muddiest Points: General CommentsMd CassimNo ratings yet
- Light Bulb II Concept Test: B C B C A ADocument7 pagesLight Bulb II Concept Test: B C B C A AMd CassimNo ratings yet
- LTI Systems: Nonlinear and Time VaryingDocument3 pagesLTI Systems: Nonlinear and Time VaryingMd CassimNo ratings yet
- Dialogue PracticeDocument3 pagesDialogue PracticeElena StanislavNo ratings yet
- Dialogue PracticeDocument3 pagesDialogue PracticeElena StanislavNo ratings yet
- How To Improve Your Spoken EnglishDocument22 pagesHow To Improve Your Spoken EnglishSyahamah FuzaiNo ratings yet
- Notes On The Control of An Aircraft With Throttle OnlyDocument5 pagesNotes On The Control of An Aircraft With Throttle OnlyMd CassimNo ratings yet
- Asynchronous Activity 4: Case 1Document3 pagesAsynchronous Activity 4: Case 1John Carlo TolentinoNo ratings yet
- JEE Test SeriesDocument24 pagesJEE Test SeriesUmesh SharmaNo ratings yet
- Wind Load (NSCP)Document1 pageWind Load (NSCP)dantevarias100% (4)
- Data Science With Python Certification - DexLab Analytics PDFDocument4 pagesData Science With Python Certification - DexLab Analytics PDFanu421No ratings yet
- Writing a Letter of SympathyDocument2 pagesWriting a Letter of SympathyMsz GamingNo ratings yet
- Programming Fundamentals using C LibrariesDocument50 pagesProgramming Fundamentals using C LibrariesDương NgânNo ratings yet
- AQA GCSE Maths 8300: Topics and Resources Foundation Tier NumberDocument3 pagesAQA GCSE Maths 8300: Topics and Resources Foundation Tier Numberharry curyNo ratings yet
- GoodDocument26 pagesGoodaditya bhandakkarNo ratings yet
- Novel Approach to Job's MethodDocument6 pagesNovel Approach to Job's Methodiabureid7460No ratings yet
- Number TheoryDocument5 pagesNumber TheoryLAKHAN KHANDELWALNo ratings yet
- Empirical Relations of Convective Heat TansferDocument29 pagesEmpirical Relations of Convective Heat TansferArvin DalisayNo ratings yet
- CH Computer NetworkingDocument7 pagesCH Computer NetworkingmahaNo ratings yet
- Mcqs 1Document12 pagesMcqs 1Ralitsa DeeDee Wilcox100% (1)
- Belt DesignDocument27 pagesBelt DesignshubhamNo ratings yet
- Class - 8 - NSTSE - MQP - 436 (M) & 439 (M) PDFDocument16 pagesClass - 8 - NSTSE - MQP - 436 (M) & 439 (M) PDFMADHAWI CHOUDHARYNo ratings yet
- Minute of ArcDocument4 pagesMinute of ArcvnfloreaNo ratings yet
- 5th Grade Practice TestDocument22 pages5th Grade Practice TestsharethefilesNo ratings yet
- Simple Harmonic MotionDocument17 pagesSimple Harmonic MotionChirag Hablani100% (1)
- MAT 17 Introduction to Truth TablesDocument4 pagesMAT 17 Introduction to Truth TablesYohan Ranuk WijesingheNo ratings yet
- NPTEL Transcript PDFDocument977 pagesNPTEL Transcript PDFLakshmiNarayana Reddy BynagariNo ratings yet
- Bachelor of Civil EngineeringDocument2 pagesBachelor of Civil EngineeringSharmaDeepNo ratings yet
- Multisource and Multitemporal Data Fusion in Remote SensingDocument26 pagesMultisource and Multitemporal Data Fusion in Remote SensingJenniffer GuayaNo ratings yet
- Grade 6 ReviewerDocument2 pagesGrade 6 ReviewerRon Joshua GipanNo ratings yet
- A Das Gupta MCQ PDFDocument72 pagesA Das Gupta MCQ PDFBhavya ChawatNo ratings yet
- Brownian MotionDocument31 pagesBrownian Motionsujatha ramkiNo ratings yet
- Chapter 7 PDFDocument25 pagesChapter 7 PDFbptlmohankumarNo ratings yet
- Section A: Sample/Pre-Board Paper 3 5 Class X Term 1 Exam Nov - Dec 2021 Mathematics (Standard) 041Document6 pagesSection A: Sample/Pre-Board Paper 3 5 Class X Term 1 Exam Nov - Dec 2021 Mathematics (Standard) 041Ashwani PathakNo ratings yet
- ACT - Piezo & MEMS Extension - Piezoelectric Material DataDocument7 pagesACT - Piezo & MEMS Extension - Piezoelectric Material DataMiguel PanessoNo ratings yet
- UT Dallas Syllabus For Ed4344.501.10s Taught by Ingrid Huisman (Ibh013000)Document5 pagesUT Dallas Syllabus For Ed4344.501.10s Taught by Ingrid Huisman (Ibh013000)UT Dallas Provost's Technology GroupNo ratings yet
- Geophone and AkselerometerDocument173 pagesGeophone and AkselerometerNajib Arangi PanjahNo ratings yet