You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Theory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationFrom EverandTheory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Feedback AmplifierDocument9 pagesFeedback AmplifierDr. Shafiulla Basha Shaik100% (1)
- Feedback AmplifiersDocument45 pagesFeedback Amplifiersحافظ حمزہ اعوانNo ratings yet
- Feedback Amplifiers: EMT 212/4 - Analog Electronic IIDocument54 pagesFeedback Amplifiers: EMT 212/4 - Analog Electronic IIJoshua DuffyNo ratings yet
- 325 Lab 8 ReportDocument10 pages325 Lab 8 Reportapi-241454978No ratings yet
- Amplifier Feedback Circuits ExplainedDocument12 pagesAmplifier Feedback Circuits ExplainedAdelin VătăşescuNo ratings yet
- Chapter 7 Amplifier Frequency Response PDFDocument32 pagesChapter 7 Amplifier Frequency Response PDFVijaykumarPatilNo ratings yet
- Multistage Transistor AmplifiersDocument8 pagesMultistage Transistor Amplifiersbree789No ratings yet
- LIC Manual NewDocument84 pagesLIC Manual NewVandhana PramodhanNo ratings yet
- BJT Ac AnalysisDocument9 pagesBJT Ac Analysisksay1504No ratings yet
- Inverting Amplifiers Lab ReportDocument9 pagesInverting Amplifiers Lab ReportRaihan JannatiNo ratings yet
- Eca Lab Manual PDFDocument56 pagesEca Lab Manual PDFrppvch100% (5)
- BJT and JFET Frequency ResponseDocument16 pagesBJT and JFET Frequency ResponseVert WheelerNo ratings yet
- Eca Lab ManualDocument78 pagesEca Lab ManualNageswariah.MNo ratings yet
- Lab Viii. Low Frequency Characteristics of Junction Field Effect TransistorsDocument6 pagesLab Viii. Low Frequency Characteristics of Junction Field Effect Transistorssachinshetty001No ratings yet
- Differential AmplifierDocument15 pagesDifferential AmplifierrppvchNo ratings yet
- MH 02N 2Document36 pagesMH 02N 2ganeshNo ratings yet
- Integrator and DifferentiatorDocument7 pagesIntegrator and DifferentiatorManoj KavediaNo ratings yet
- RC Low Pass FilterDocument8 pagesRC Low Pass FilterShaqer ZohaNo ratings yet
- Dual Input Differential Amplifier GuideDocument5 pagesDual Input Differential Amplifier GuidePrempal TomarNo ratings yet
- Photodiode vs Phototransistor: Key Differences (39Document5 pagesPhotodiode vs Phototransistor: Key Differences (39CladyNo ratings yet
- Mwoc Final Lab Manual 28-08-2010Document77 pagesMwoc Final Lab Manual 28-08-2010downloadscribdpdfNo ratings yet
- 1.classification of Amplifiers, Distortions in AmplifiersDocument12 pages1.classification of Amplifiers, Distortions in AmplifiersMrs. P. Ganga BhavaniNo ratings yet
- Operational AmplifiersDocument49 pagesOperational AmplifiersKostas TressosNo ratings yet
- Hearing Aid (Project Report)Document5 pagesHearing Aid (Project Report)Speech's ClubNo ratings yet
- LIC Lab ManualDocument65 pagesLIC Lab ManualBala Subramanian0% (1)
- A Modified SEPIC Converter For High Power Factor Rectifier and Universal Input Voltage ApplicationsDocument12 pagesA Modified SEPIC Converter For High Power Factor Rectifier and Universal Input Voltage ApplicationsBritto TigerNo ratings yet
- BJTDocument6 pagesBJTengineerluvNo ratings yet
- Edc Unit 3 TransistorDocument17 pagesEdc Unit 3 TransistorsrinivasNo ratings yet
- LED Lamp Dimmer CircuitDocument3 pagesLED Lamp Dimmer CircuitashishNo ratings yet
- BJTDocument46 pagesBJTshubhiyadavNo ratings yet
- Applications of Opamp As Comparators & Schmitt TriggerDocument4 pagesApplications of Opamp As Comparators & Schmitt TriggerPaul JambormiasNo ratings yet
- Lecture 5: Transformers (Continued)Document16 pagesLecture 5: Transformers (Continued)Aldiansyah dtsNo ratings yet
- WLAN Design Guide PDFDocument174 pagesWLAN Design Guide PDFCherif DilmiNo ratings yet
- Differential Amplifier - The Voltage SubtractorDocument6 pagesDifferential Amplifier - The Voltage SubtractorRing MasterNo ratings yet
- 4.transformer Coupled AmplifierDocument21 pages4.transformer Coupled AmplifierMrs. P. Ganga BhavaniNo ratings yet
- Analysis of Class B Push-Pull Amplifier CircuitDocument24 pagesAnalysis of Class B Push-Pull Amplifier CircuitMbugua DuncanNo ratings yet
- Department of Electronics & Telecommunication: Presented By: Valluri Bhavana MSC - Etc, 1 Semester Roll No: Pg19Etc-002Document22 pagesDepartment of Electronics & Telecommunication: Presented By: Valluri Bhavana MSC - Etc, 1 Semester Roll No: Pg19Etc-002BHAVANA VALLURINo ratings yet
- Bipolar Transistor BiasingDocument8 pagesBipolar Transistor BiasingGilberto ManhattanNo ratings yet
- Power Devices and IGBT CharacteristicsDocument38 pagesPower Devices and IGBT CharacteristicsKien Trung50% (2)
- Wireless FM Microphone CircuitDocument2 pagesWireless FM Microphone Circuitcuongspvl2713No ratings yet
- Amplifier Frequecny ResponseDocument63 pagesAmplifier Frequecny ResponseNuman khanNo ratings yet
- CB and CC Amplifier CharacteristicsDocument24 pagesCB and CC Amplifier Characteristicsslidergera100% (1)
- Digital Modulation PDFDocument41 pagesDigital Modulation PDFPabitraMandalNo ratings yet
- LVDT Lab Intro to Linear Variable Differential TransformersDocument6 pagesLVDT Lab Intro to Linear Variable Differential TransformersLaithSalameenNo ratings yet
- Lab 4 Half Wave and Full WaveDocument8 pagesLab 4 Half Wave and Full WaveRashid Rind Rashid Rind100% (1)
- UNIT 3-2marks-FET PDFDocument9 pagesUNIT 3-2marks-FET PDFpriyanka236No ratings yet
- Chapter 12 (Electronic Devices and Circuits-II) (1) FinalDocument50 pagesChapter 12 (Electronic Devices and Circuits-II) (1) FinalAhmed HussainNo ratings yet
- JBL SSDMDocument105 pagesJBL SSDMEmmanuel Zamora Manuelini ZamoriniNo ratings yet
- Linear Integrated Circuits - EC2254Document77 pagesLinear Integrated Circuits - EC2254Muthu LakiNo ratings yet
- Emailing 300 TOP Operational Amplifiers Questions and Answers OP-AMP - PDF Version 1Document15 pagesEmailing 300 TOP Operational Amplifiers Questions and Answers OP-AMP - PDF Version 1Jesan tonikNo ratings yet
- 2-Bit Magnitude Comparator Design Using Logic StylesDocument12 pages2-Bit Magnitude Comparator Design Using Logic StylesSunith CkNo ratings yet
- Relaxation Oscillators (Rakib-EEE)Document35 pagesRelaxation Oscillators (Rakib-EEE)Anonymous 1leNQyPBMNo ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- Negative Feedback and Negative Feedback Systems PDFDocument10 pagesNegative Feedback and Negative Feedback Systems PDFmarufuddin0No ratings yet
- AnalogElectronics Th-5Document12 pagesAnalogElectronics Th-5Albert GenceNo ratings yet
- Applied Electronics II Chapter One Final LectureDocument20 pagesApplied Electronics II Chapter One Final LectureFanuel OlkebaNo ratings yet
- Electrical Machine Design Unit3-Era PDFDocument19 pagesElectrical Machine Design Unit3-Era PDFvundavilliravindra100% (1)
- Transistor Circuit Configurations ExplainedDocument12 pagesTransistor Circuit Configurations ExplainedNon ArtistsNo ratings yet
- Sensors and Transducers Real Time Computing and Programming - SensorsDocument80 pagesSensors and Transducers Real Time Computing and Programming - SensorsNon ArtistsNo ratings yet
- Jenny's ECE - 527Document50 pagesJenny's ECE - 527Non ArtistsNo ratings yet
- ELE 403 LaplaceDocument7 pagesELE 403 LaplaceNon ArtistsNo ratings yet
- Ece 505 (TF & MODELS)Document9 pagesEce 505 (TF & MODELS)Non ArtistsNo ratings yet
- Real Time Computing and Programming - IntroDocument19 pagesReal Time Computing and Programming - IntroNon ArtistsNo ratings yet
- Sensors and Transducers Real Time Computing and Programming - SensorsDocument80 pagesSensors and Transducers Real Time Computing and Programming - SensorsNon ArtistsNo ratings yet
- Sensors and Transducers Real Time Computing and Programming - SensorsDocument80 pagesSensors and Transducers Real Time Computing and Programming - SensorsNon ArtistsNo ratings yet
- New Doc 2021-07-29 15.24.40Document1 pageNew Doc 2021-07-29 15.24.40Non ArtistsNo ratings yet
- Sensors and Transducers Real Time Computing and Programming - SensorsDocument80 pagesSensors and Transducers Real Time Computing and Programming - SensorsNon ArtistsNo ratings yet
- Systems: Developing A Preliminary Causal Loop Diagram For Understanding The Wicked Complexity of The COVID-19 PandemicDocument9 pagesSystems: Developing A Preliminary Causal Loop Diagram For Understanding The Wicked Complexity of The COVID-19 PandemicEkoNo ratings yet
- EDC Viva QuestionsDocument5 pagesEDC Viva QuestionsPratik BhalakeNo ratings yet
- Systems Thinking: A Means To Understanding Our Complex WorldDocument11 pagesSystems Thinking: A Means To Understanding Our Complex WorldKristina100% (1)
- E PosterDocument1 pageE PosterJay-ar Adcan Di ChosaNo ratings yet
- System Dynamics Methods - A Quick Introduction (CW Kirkwood 2013) PDFDocument124 pagesSystem Dynamics Methods - A Quick Introduction (CW Kirkwood 2013) PDFDavid BudaghyanNo ratings yet
- Department of Electrical Engineering College of Engineering / University of Baghdad Third Year, Calss - A Ali Rasheed MahdiDocument16 pagesDepartment of Electrical Engineering College of Engineering / University of Baghdad Third Year, Calss - A Ali Rasheed Mahdiali,r98No ratings yet
- Voltage Sense AmplifierDocument11 pagesVoltage Sense AmplifierJason LiuNo ratings yet
- VTU Notes Basic ElectronicsDocument22 pagesVTU Notes Basic ElectronicsCicira BNo ratings yet
- Day 1 Enp Arias 01 Regional Planning and Development EADocument60 pagesDay 1 Enp Arias 01 Regional Planning and Development EAEdward Aguirre PingoyNo ratings yet
- 1Document10 pages1Danielle DaniNo ratings yet
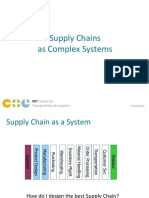
- Supply Chains As Complex Systems: Center For Transportation & LogisticsDocument28 pagesSupply Chains As Complex Systems: Center For Transportation & LogisticsPep VasilevaNo ratings yet
- A Comparative Study on Success Factors of Netflix and Amazon Prime VideoDocument13 pagesA Comparative Study on Success Factors of Netflix and Amazon Prime VideoWHY NOTNo ratings yet
- Oscillator Chapter SummaryDocument9 pagesOscillator Chapter Summaryحيدر سالمNo ratings yet
- Design Probes For More Than Human Centered Design v.3.0Document30 pagesDesign Probes For More Than Human Centered Design v.3.0Fiona CampbellNo ratings yet
- Electronic Instruments and Measurements: UNIT-4 Signal GeneratorDocument29 pagesElectronic Instruments and Measurements: UNIT-4 Signal GeneratorTenda TiyNo ratings yet
- Applied II NoteDocument142 pagesApplied II NoteTemesgen MekonenNo ratings yet
- Historical Institutionalism, Critical Realism and Morphogenetic Social Theory - Towards A Synthesis of Explaining Why History Matters in OrganisationsDocument29 pagesHistorical Institutionalism, Critical Realism and Morphogenetic Social Theory - Towards A Synthesis of Explaining Why History Matters in OrganisationskumarpatnamNo ratings yet
- L2-SD Systems Thinking & Causal Loop DiagrammingDocument45 pagesL2-SD Systems Thinking & Causal Loop DiagrammingUbed Al-Idist100% (1)
- Electronics Interview Questions & AnswersDocument7 pagesElectronics Interview Questions & AnswerssmydyNo ratings yet
- (G) - LEC Feedback and OscillatorsDocument43 pages(G) - LEC Feedback and OscillatorsAngelino Pimentel100% (1)
- Feedback: Harish Karkera Ashish GundreDocument16 pagesFeedback: Harish Karkera Ashish GundreAshish GundreNo ratings yet
- Applied II NoteDocument171 pagesApplied II NoteAklilu HailuNo ratings yet
- CH16 OscilatorsDocument70 pagesCH16 Oscilatorsmiathegirl9No ratings yet
- Climate Change Feedback LoopsDocument6 pagesClimate Change Feedback LoopsManish KNo ratings yet
- HomeostasisDocument15 pagesHomeostasisPrecious MananganNo ratings yet
- Foundations of environmental systems and societiesDocument26 pagesFoundations of environmental systems and societiesmia lamNo ratings yet
- Thinking in Systems Audiobook SupplementDocument33 pagesThinking in Systems Audiobook SupplementDoor Darsh100% (5)
- The Wings To Awakening PDFDocument24 pagesThe Wings To Awakening PDFMick YoNo ratings yet
- Unit 4-Feedback Amplifier by Dr. Meenakshi RanaDocument34 pagesUnit 4-Feedback Amplifier by Dr. Meenakshi RanaRicha MishraNo ratings yet
- Part 1Document38 pagesPart 1Anupam ShakyaNo ratings yet