You might also like
- Power System Control and ProtectionFrom EverandPower System Control and ProtectionB. Don RussellRating: 4 out of 5 stars4/5 (11)
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsRating: 4.5 out of 5 stars4.5/5 (3)
- Investigation of Response Amplitude Operators For Floating Offshore Wind TurbinesDocument10 pagesInvestigation of Response Amplitude Operators For Floating Offshore Wind Turbinesmih1No ratings yet
- Wind Turbine - Technical PaperDocument233 pagesWind Turbine - Technical PaperImran Siddiqui100% (1)
- Dynamics Modeling and Loads Analysis of An Offshore Floating Wind TurbineDocument233 pagesDynamics Modeling and Loads Analysis of An Offshore Floating Wind TurbineNoushad Bin JamalNo ratings yet
- State-space modeling of wave radiation forces for floating offshore wind turbinesDocument14 pagesState-space modeling of wave radiation forces for floating offshore wind turbinesMateus Lanzi CiolaNo ratings yet
- State of The Art in Floating Wind Turbine Design Tools: A. Cordle J. JonkmanDocument11 pagesState of The Art in Floating Wind Turbine Design Tools: A. Cordle J. JonkmanMilad RadNo ratings yet
- State-Space Realization of The Wave-Radiation Force Within FastDocument14 pagesState-Space Realization of The Wave-Radiation Force Within FastjamilNo ratings yet
- Comparative Study On Mooring Line Dynamic Loading - Brown & MavrakosDocument21 pagesComparative Study On Mooring Line Dynamic Loading - Brown & MavrakossojanvasudevanNo ratings yet
- Hydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDocument10 pagesHydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDr R Panneer SelvamNo ratings yet
- Estimation of Hydrodynamic Forces and Motion of Ships With Steady Forward SpeedDocument26 pagesEstimation of Hydrodynamic Forces and Motion of Ships With Steady Forward SpeedMir Tareque AliNo ratings yet
- Validation of A FAST Semi-Submersible Floating WinDocument31 pagesValidation of A FAST Semi-Submersible Floating WinRogério VasconcelosNo ratings yet
- Comparative Analysis PDFDocument35 pagesComparative Analysis PDFPrithivi RajNo ratings yet
- Thesis VitaDocument6 pagesThesis VitaBuyCollegePaperOnlineBillings100% (2)
- Driscoll 2000Document14 pagesDriscoll 2000Soledad AceitunoNo ratings yet
- Get TRDocreentry 63Document416 pagesGet TRDocreentry 63David UrieNo ratings yet
- Kalman estimation for position and velocity in ReaTHM testingDocument11 pagesKalman estimation for position and velocity in ReaTHM testingTeckzhi TanNo ratings yet
- Prediction of Wing Flutter Boundary Using High Fidelity Delayed Detached Eddy SimulationDocument23 pagesPrediction of Wing Flutter Boundary Using High Fidelity Delayed Detached Eddy SimulationHamed AzargoshasbNo ratings yet
- Probabilistic Assessment of Floating Wind TurbineDocument12 pagesProbabilistic Assessment of Floating Wind TurbineAdrNo ratings yet
- Fatigue of Wind TurbinesDocument12 pagesFatigue of Wind TurbinesGregorSmithNo ratings yet
- NarsipurPomeroySelig 2012Document18 pagesNarsipurPomeroySelig 2012idora27No ratings yet
- Numerical Study On Drag Reduction For Grid-Fin ConfigurationsDocument10 pagesNumerical Study On Drag Reduction For Grid-Fin ConfigurationsaeroacademicNo ratings yet
- BansalSelig-2016-AIAA-Paper-2016-3725-MultiElement_240412_115606Document27 pagesBansalSelig-2016-AIAA-Paper-2016-3725-MultiElement_240412_115606jose.colombodelgadoNo ratings yet
- APA DOC No. 2104Document409 pagesAPA DOC No. 2104hcayetanoNo ratings yet
- The Mean Velocity Profile of A Smooth-Flat-Plate TDocument26 pagesThe Mean Velocity Profile of A Smooth-Flat-Plate TDaniel CruzNo ratings yet
- Preliminary Analysis of An Oscillating Surge Wave Energy Converter With Controlled GeometryDocument12 pagesPreliminary Analysis of An Oscillating Surge Wave Energy Converter With Controlled GeometryaseNo ratings yet
- Overview and Summary of The Second AIAA High Lift Prediction Workshop (Invited)Document37 pagesOverview and Summary of The Second AIAA High Lift Prediction Workshop (Invited)Jose Taco Jr.No ratings yet
- Extrapolation of Extreme and Fatigue Loads Using Probabilistic MethodsDocument42 pagesExtrapolation of Extreme and Fatigue Loads Using Probabilistic MethodsWang HaoyuNo ratings yet
- WCE2013 pp1628-1633Document6 pagesWCE2013 pp1628-1633senadbalicNo ratings yet
- Effect of Blade Torsion On Modeling Results For The Small Wind Research Turbine (SWRT)Document12 pagesEffect of Blade Torsion On Modeling Results For The Small Wind Research Turbine (SWRT)deathjester1No ratings yet
- Single Colum Format PESGM22 - FragilityDocument11 pagesSingle Colum Format PESGM22 - FragilityAXONo ratings yet
- PNNL 14768Document244 pagesPNNL 14768Rajendra BadjatyaNo ratings yet
- A Numerical Study of Bluff Body Aerodynamics in High Reynolds Number Flows by Viscous Vortex Element MethodDocument15 pagesA Numerical Study of Bluff Body Aerodynamics in High Reynolds Number Flows by Viscous Vortex Element MethodPCPCNo ratings yet
- Reliability-Based Design Optimization of A Rubble Mound Breakwater in A Changing ClimateDocument9 pagesReliability-Based Design Optimization of A Rubble Mound Breakwater in A Changing ClimateLuis Carlos EspinozaNo ratings yet
- Prediction of A Supersonic Wing Flutter Boundary Using A High Fidelity Detached Eddy SimulationDocument21 pagesPrediction of A Supersonic Wing Flutter Boundary Using A High Fidelity Detached Eddy SimulationTheNo ratings yet
- 000000000001013900Document188 pages000000000001013900shawnr737667% (3)
- Semi-Submersible's Response Prediction by Diffraction Potential MethodeDocument8 pagesSemi-Submersible's Response Prediction by Diffraction Potential MethodePaul CLoonNo ratings yet
- Wave LengthhDocument20 pagesWave Lengthhmabm89No ratings yet
- Hiper2010 MelbourneDocument310 pagesHiper2010 MelbournemaciuluNo ratings yet
- Francis Noblesse - On The Theory of Three-Dimensional Flow About A Ship Moving With Constant Speed in A Regular SeaDocument40 pagesFrancis Noblesse - On The Theory of Three-Dimensional Flow About A Ship Moving With Constant Speed in A Regular SeaYuriyAKNo ratings yet
- Quasi Static Moooring AnalysisDocument23 pagesQuasi Static Moooring AnalysisIoannis MitsisNo ratings yet
- An Inductive Charging and Communications System for Profiling Ocean MooringsDocument10 pagesAn Inductive Charging and Communications System for Profiling Ocean Mooringsajacks504No ratings yet
- Alavimehr 2019Document13 pagesAlavimehr 2019Mohamad SadeghiNo ratings yet
- 2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationsDocument10 pages2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationshenkNo ratings yet
- Wind/Wave Misalignment in The Loads Analysis of A Floating Offshore Wind TurbineDocument13 pagesWind/Wave Misalignment in The Loads Analysis of A Floating Offshore Wind Turbinesabapathi131No ratings yet
- Numerical Investigation On Seakeeping Performance of SWATH With Three Dimensional Translating-Pulsating Source Green Function (Sun-Yao-Ye)Document11 pagesNumerical Investigation On Seakeeping Performance of SWATH With Three Dimensional Translating-Pulsating Source Green Function (Sun-Yao-Ye)naufragatoNo ratings yet
- Wind Power Forecasting Error Distributions: An International ComparisonDocument9 pagesWind Power Forecasting Error Distributions: An International ComparisonMd CassimNo ratings yet
- AIAA20050085Document11 pagesAIAA20050085api-3800845No ratings yet
- Assessment of Fatigue Failure in FPSO Mooring SystemsDocument14 pagesAssessment of Fatigue Failure in FPSO Mooring SystemsEditor IJTSRDNo ratings yet
- Water 10 00906 v3Document18 pagesWater 10 00906 v3Omar SaaedNo ratings yet
- Recent Additions in The Modeling Capabilities of An Open-Source Wave Energy Converter Design ToolDocument10 pagesRecent Additions in The Modeling Capabilities of An Open-Source Wave Energy Converter Design ToolaseNo ratings yet
- Investigation of Variable Spanwise Waviness Wavelength Effect On Wing Aerodynamic PerformanceDocument13 pagesInvestigation of Variable Spanwise Waviness Wavelength Effect On Wing Aerodynamic Performanceelson.study.workNo ratings yet
- TLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFDocument7 pagesTLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFZylyn KuaNo ratings yet
- Numerical river simulationsDocument3 pagesNumerical river simulationsCarlos SerranoNo ratings yet
- PT LV WaveforceDocument9 pagesPT LV WaveforcehemantcabhaleNo ratings yet
- Wind Farm ThesisDocument9 pagesWind Farm Thesisgof1mytamev2100% (1)
- Statistics of Particle Time-Temperature Histories: Progress Report For June 2013Document29 pagesStatistics of Particle Time-Temperature Histories: Progress Report For June 2013Yonathan Vincet Mendoza JayoNo ratings yet
- NREL Linearization Jonkman FullDocument21 pagesNREL Linearization Jonkman FullAman SharmaNo ratings yet
- Elhanafi 2018Document15 pagesElhanafi 2018walacrNo ratings yet
- Electrical Engineering Research PapersDocument6 pagesElectrical Engineering Research Papersmqolulbkf100% (1)
- Wind TestingDocument22 pagesWind TestingNoel BinoyNo ratings yet
- How To Use LWR For MacDocument22 pagesHow To Use LWR For MacKelsey WilsonNo ratings yet
- How To Use LWR For MacDocument22 pagesHow To Use LWR For MacKelsey WilsonNo ratings yet
- 15 LectureOutlineDocument47 pages15 LectureOutlineMarsyaNo ratings yet
- Scalind of Wind TurbineDocument2 pagesScalind of Wind TurbineNoel BinoyNo ratings yet
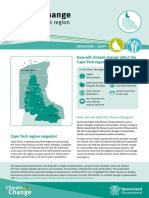
- Climate Change: in The Cape York RegionDocument8 pagesClimate Change: in The Cape York RegionNoel BinoyNo ratings yet
- Technical Design of a Shrouded Small-Scale TurbineDocument24 pagesTechnical Design of a Shrouded Small-Scale TurbineNoel BinoyNo ratings yet
- Drones: Drone Swarms in Fire Suppression Activities: A Conceptual FrameworkDocument22 pagesDrones: Drone Swarms in Fire Suppression Activities: A Conceptual FrameworkNoel BinoyNo ratings yet
- Study Plan Sheet ExampleDocument1 pageStudy Plan Sheet ExampleNoel BinoyNo ratings yet
- 12 10 26 Long Report LayoutDocument3 pages12 10 26 Long Report LayoutliamlimNo ratings yet
- Mathematics For Engineers and Scientists 3 PDFDocument89 pagesMathematics For Engineers and Scientists 3 PDFShailin SequeiraNo ratings yet
- 13fluid Mechanics 209-226Document11 pages13fluid Mechanics 209-226Jay Mark ParaynoNo ratings yet
- HW1Document20 pagesHW1Shinozuka AyuNo ratings yet
- Lab Report of DynamicsDocument15 pagesLab Report of DynamicsUmer Abbas100% (4)
- Wind TestingDocument22 pagesWind TestingNoel BinoyNo ratings yet
- Final Report: Project Title: Covering Period: Date of Report: Recipient: Award Number: Working PartnersDocument312 pagesFinal Report: Project Title: Covering Period: Date of Report: Recipient: Award Number: Working PartnersAlvin SauceNo ratings yet
- Wind TestingDocument22 pagesWind TestingNoel BinoyNo ratings yet
- Philips LCD Monitor 220EW9FB Service ManualDocument10 pagesPhilips LCD Monitor 220EW9FB Service Manualpagy snvNo ratings yet
- Complete HSE document kit for ISO 14001 & ISO 45001 certificationDocument8 pagesComplete HSE document kit for ISO 14001 & ISO 45001 certificationfaroz khanNo ratings yet
- CW3 - 4Document2 pagesCW3 - 4Rigel Zabate100% (1)
- Wa0031 PDFDocument1 pageWa0031 PDFAnaNo ratings yet
- Anchoring in Bad WeatherDocument2 pagesAnchoring in Bad WeatherDujeKnezevicNo ratings yet
- EY - NASSCOM - M&A Trends and Outlook - Technology Services VF - 0Document35 pagesEY - NASSCOM - M&A Trends and Outlook - Technology Services VF - 0Tejas JosephNo ratings yet
- TriPAD Seminar Provides Guidance for TeachersDocument2 pagesTriPAD Seminar Provides Guidance for TeachersKingJames Lindo BarrogaNo ratings yet
- Conduct CardsDocument9 pagesConduct Cardsapi-248309459No ratings yet
- Computer Fundamentals: Input-Process-Output ModelDocument7 pagesComputer Fundamentals: Input-Process-Output ModelHarsh Nsf WolfNo ratings yet
- Design of Anchor Bolts Embedded in MasonryDocument6 pagesDesign of Anchor Bolts Embedded in MasonryAnonymous DJrec2No ratings yet
- List of Dealers in NoidaDocument240 pagesList of Dealers in NoidaAparna Pande67% (3)
- Theory of Planned Behaviour (TPB)Document18 pagesTheory of Planned Behaviour (TPB)Afiq Wahyu AjiNo ratings yet
- Normalization Castuera BSCS2CDocument8 pagesNormalization Castuera BSCS2CRichard, Jr. CastueraNo ratings yet
- Missing Number Series Questions Specially For Sbi Po PrelimsDocument18 pagesMissing Number Series Questions Specially For Sbi Po PrelimsKriti SinghaniaNo ratings yet
- CCST+Cybersecurity+Objecitve+Domain Cisco Final wCiscoLogoDocument3 pagesCCST+Cybersecurity+Objecitve+Domain Cisco Final wCiscoLogoQazi ZayadNo ratings yet
- Air ConditionDocument4 pagesAir ConditionTaller Energy EnergyNo ratings yet
- Manual SOC2 DVR Mini 90nDocument83 pagesManual SOC2 DVR Mini 90nDeybby Luna Laredo0% (1)
- Certified Elder Law Attorney Middletown NyDocument8 pagesCertified Elder Law Attorney Middletown NymidhudsonlawNo ratings yet
- Instruction Manual For Spider S3 and Spider S4Document6 pagesInstruction Manual For Spider S3 and Spider S4Syah KamalNo ratings yet
- Impact On Cocoon Quality Improvement.1Document10 pagesImpact On Cocoon Quality Improvement.1Naveen NtrNo ratings yet
- ERecon Software Development at Hospital Corporation of America-1553395398 PDFDocument11 pagesERecon Software Development at Hospital Corporation of America-1553395398 PDFKaren CarranzaNo ratings yet
- Proposed Rule: Employment: Adverse ActionsDocument4 pagesProposed Rule: Employment: Adverse ActionsJustia.comNo ratings yet
- AarDocument2 pagesAarkomar agusNo ratings yet
- PPE Use Tool Box TalkDocument3 pagesPPE Use Tool Box Talkanon_348105361No ratings yet
- MCMT 2 eDocument461 pagesMCMT 2 eRonNo ratings yet
- Terex-CC8800 1 Twin B1 200808Document8 pagesTerex-CC8800 1 Twin B1 200808pvs12684No ratings yet
- Nikita Rajput: Anchor/Host/Master of CeremoniesDocument21 pagesNikita Rajput: Anchor/Host/Master of CeremoniesnamanNo ratings yet
- Instructions To Employee For Submitting Online Application For Transfer Under Rule - 38 of Postal Manual Vol.-IVDocument6 pagesInstructions To Employee For Submitting Online Application For Transfer Under Rule - 38 of Postal Manual Vol.-IVSankarMathi VaigundhamNo ratings yet
- Ulliensb PDF 1516040087Document30 pagesUlliensb PDF 1516040087Jose Daniel ArangoNo ratings yet
- Balcony AnalysysDocument4 pagesBalcony AnalysysKory EstesNo ratings yet