You might also like
- Li-On BatteriesDocument140 pagesLi-On BatteriesShubhNo ratings yet
- Gear Hobbing Shaping and Shaving A Guide To Cycle Time Estimating and Process Planning PDFDocument183 pagesGear Hobbing Shaping and Shaving A Guide To Cycle Time Estimating and Process Planning PDFvenkat100% (2)
- Transaction Codes EwmDocument11 pagesTransaction Codes EwmEMILPLOSCARU100% (1)
- 659 Transformer Thermal ModellingDocument197 pages659 Transformer Thermal Modellingepri100% (1)
- Basics of Electrical EnggDocument1,147 pagesBasics of Electrical EnggNandha Kumar Mohan100% (1)
- Machine Elements Life and Design by Boris M.klebanov-1Document454 pagesMachine Elements Life and Design by Boris M.klebanov-1utente41No ratings yet
- Gas SamplingDocument8 pagesGas Samplingmagobo220772100% (1)
- 610 Offshore Generation Cable Connections (2015)Document180 pages610 Offshore Generation Cable Connections (2015)Nam Hoai Le100% (1)
- Engineering Worksheets For Maple PDFDocument42 pagesEngineering Worksheets For Maple PDFOvidiu BagdasarNo ratings yet
- Metocean Design Criteria ReportDocument129 pagesMetocean Design Criteria ReportWilliam O OkolotuNo ratings yet
- Power Electronics Design: A Practitioner's GuideFrom EverandPower Electronics Design: A Practitioner's GuideRating: 4.5 out of 5 stars4.5/5 (3)
- Tim Huff - LRFD Bridge Design - Fundamentals and Applications-CRC Press (2022)Document387 pagesTim Huff - LRFD Bridge Design - Fundamentals and Applications-CRC Press (2022)Carlos Alberto A. Diaz VillalobosNo ratings yet
- Manual de Servicio Ecografo Mindray dc-7Document5 pagesManual de Servicio Ecografo Mindray dc-7Rene CabreraNo ratings yet
- A162646 PDFDocument296 pagesA162646 PDFMorgen GumpNo ratings yet
- What Is TeaDocument12 pagesWhat Is TeaMilen PeninNo ratings yet
- Crane Transportation DesignDocument65 pagesCrane Transportation Designdawit100% (1)
- MG3 Circuit Diagram-11-07-22 PDFDocument145 pagesMG3 Circuit Diagram-11-07-22 PDFmehdi89% (9)
- Digital Signal Processing Lab ManualDocument61 pagesDigital Signal Processing Lab ManualOmer Sheikh100% (6)
- UntitledDocument51 pagesUntitledVIJAY KUMAR PATELNo ratings yet
- @seismicisolationDocument167 pages@seismicisolationColque Jhon100% (1)
- Leibinger JET3 UP Service ManualDocument214 pagesLeibinger JET3 UP Service ManualMaintenance Can-Pack Ukraine100% (6)
- Experimental Investigation of Tube Rupture Under Boiler Dynamic Operating Conditions (Mossaedyousid Alawwad Id 199656100) Dec 2013Document152 pagesExperimental Investigation of Tube Rupture Under Boiler Dynamic Operating Conditions (Mossaedyousid Alawwad Id 199656100) Dec 2013rajanarsu100% (1)
- PrelimReport_EBaja_Fall19Document47 pagesPrelimReport_EBaja_Fall19achumilemlata48No ratings yet
- (Estrera Final Papers) YAHOODocument95 pages(Estrera Final Papers) YAHOOJohn Mark CarpioNo ratings yet
- Under Demonstration Project of ECBC Cell - Uttarakhand: Techno FeasibilityDocument22 pagesUnder Demonstration Project of ECBC Cell - Uttarakhand: Techno FeasibilityChiddharth FenixNo ratings yet
- The Impact of Different Battery Technologies For Remote MicrogridDocument77 pagesThe Impact of Different Battery Technologies For Remote MicrogridAmer AlmansoryNo ratings yet
- HALE DesignDocument84 pagesHALE DesignA U Nachiketh KumarNo ratings yet
- Toc-Sp5 3 3Document2 pagesToc-Sp5 3 3JohnNo ratings yet
- Coiled Tubing SafetyDocument36 pagesCoiled Tubing Safetyrohanp100% (1)
- DWCRT Tech Manual REV APR2021Document131 pagesDWCRT Tech Manual REV APR2021arjang.norouziNo ratings yet
- Performance and Metal ReleaseDocument144 pagesPerformance and Metal Releaseeitan-dalia4971No ratings yet
- Tips&Tricks To Using EnergyPlus - EERE - U.S. Department of EnergyDocument59 pagesTips&Tricks To Using EnergyPlus - EERE - U.S. Department of EnergycloubuNo ratings yet
- Manual de Servicio Nellcor N 395Document106 pagesManual de Servicio Nellcor N 395solmolina20No ratings yet
- Helix Rev 04 PDFDocument250 pagesHelix Rev 04 PDFBacuda XerindaNo ratings yet
- Electrolytic Capacitor For Pulse GenerationDocument148 pagesElectrolytic Capacitor For Pulse Generationmohi jefriNo ratings yet
- Introduction To Piezoelectric Transducers Carter Kensley 2022Document72 pagesIntroduction To Piezoelectric Transducers Carter Kensley 2022svfNo ratings yet
- Final Thesis 150500Document45 pagesFinal Thesis 150500Arslan MushtaqNo ratings yet
- NQ Series Manual 05Document48 pagesNQ Series Manual 05Hugo Mioses Garcia HernandezNo ratings yet
- Bellsy Dissertation PDFDocument77 pagesBellsy Dissertation PDFGabriel JimenezNo ratings yet
- Elecric Circuit DCDocument558 pagesElecric Circuit DCImran AhmedNo ratings yet
- Mek8222 SM-DDocument249 pagesMek8222 SM-Dthanhtu987No ratings yet
- Radiation Shielding Using DUO2 in Nonmetallic MatricesDocument42 pagesRadiation Shielding Using DUO2 in Nonmetallic Matrices4194002No ratings yet
- ECE Team Report: Made For Students, by StudentsDocument138 pagesECE Team Report: Made For Students, by Studentsjes garNo ratings yet
- 2020 Anthropometry Procedures Manual 508Document100 pages2020 Anthropometry Procedures Manual 508stone heartNo ratings yet
- Nist Ncstar 1-2b, WTC InvestigationDocument208 pagesNist Ncstar 1-2b, WTC InvestigationDavid PetersNo ratings yet
- Manual 027Document141 pagesManual 027Elisa SanchezNo ratings yet
- Stirling Convertor Control For A Lunar Concept RoverDocument134 pagesStirling Convertor Control For A Lunar Concept RoverMichelangelo VetrugnoNo ratings yet
- Emission Benefits From Repowering The MV Daniel W. Wise: Submitted byDocument51 pagesEmission Benefits From Repowering The MV Daniel W. Wise: Submitted byZahra AfrazNo ratings yet
- GE Portascan Portable Bladder Scanner - Service ManualDocument18 pagesGE Portascan Portable Bladder Scanner - Service ManualHarold MartinezNo ratings yet
- Ammann VH 950Document210 pagesAmmann VH 950damian widutoNo ratings yet
- 10l User Manual-AngelBissDocument31 pages10l User Manual-AngelBissSeek MadNo ratings yet
- Hydro-Electric Generation System For The DC House Project: Dennis Kwan Mitchel KrugDocument46 pagesHydro-Electric Generation System For The DC House Project: Dennis Kwan Mitchel Krugultrakill rampageNo ratings yet
- Lessons Electric Circuits 1 PDFDocument530 pagesLessons Electric Circuits 1 PDFStefano SintoniNo ratings yet
- Sanitaire Decanter AssemblyDocument41 pagesSanitaire Decanter AssemblyVikram RangasamyNo ratings yet
- Fifth Edition, Last Update January 18, 2006Document533 pagesFifth Edition, Last Update January 18, 2006Alexandra MilitaruNo ratings yet
- VNet ManualDocument107 pagesVNet ManualFelipe Andrés Silva CorderoNo ratings yet
- Concept Design For A High Temperature Helium Brayton Cycle With Interstage Heating and Cooling PDFDocument93 pagesConcept Design For A High Temperature Helium Brayton Cycle With Interstage Heating and Cooling PDFjameeel05No ratings yet
- Estcp Cost and Performance Report: Decontamination of Test Range Metal Debris Using A Transportable Flashing FurnaceDocument33 pagesEstcp Cost and Performance Report: Decontamination of Test Range Metal Debris Using A Transportable Flashing FurnaceSamuel LiewNo ratings yet
- Fractional-Slot Surface Mounted PM Motors With Concentrated Windings For Hev Traction DrivesDocument43 pagesFractional-Slot Surface Mounted PM Motors With Concentrated Windings For Hev Traction Drivespixelo09No ratings yet
- Multi Layer InsulationDocument44 pagesMulti Layer InsulationRamprasad ThekkethilNo ratings yet
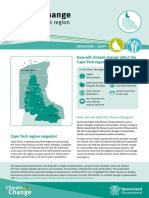
- Climate Change: in The Cape York RegionDocument8 pagesClimate Change: in The Cape York RegionNoel BinoyNo ratings yet
- Scalind of Wind TurbineDocument2 pagesScalind of Wind TurbineNoel BinoyNo ratings yet
- Fast Code Verification of Scaling Laws For Deepcwind Floating Wind System TestsDocument13 pagesFast Code Verification of Scaling Laws For Deepcwind Floating Wind System TestsNoel BinoyNo ratings yet
- Study Plan Sheet ExampleDocument1 pageStudy Plan Sheet ExampleNoel BinoyNo ratings yet
- Wind TestingDocument22 pagesWind TestingNoel BinoyNo ratings yet
- Lac Operon - Genetics-Essentials-Concepts-and-ConnectionsDocument15 pagesLac Operon - Genetics-Essentials-Concepts-and-ConnectionsDiandra AnnisaNo ratings yet
- The Changing Profile of Social DeathDocument26 pagesThe Changing Profile of Social DeathCrystal LegionairesNo ratings yet
- Introduction To Biopotential Measurement and Excitation: (Bioelectromagnetism - Jakko Malmivuo, Robert Plonsey)Document23 pagesIntroduction To Biopotential Measurement and Excitation: (Bioelectromagnetism - Jakko Malmivuo, Robert Plonsey)Lynn WankharNo ratings yet
- Le Folio Dela Cucuk SkinDocument9 pagesLe Folio Dela Cucuk SkinTeun Siew LingNo ratings yet
- Guidelines Using Thermal Mass Concrete BuildingsDocument12 pagesGuidelines Using Thermal Mass Concrete Buildingsnatalia_campelo100% (1)
- Narrative TextDocument7 pagesNarrative TextFika Dian NuranitaNo ratings yet
- Design and Development of 5.5 GHZ Dual Polarized Dish Antenna For Ism ApplicationsDocument38 pagesDesign and Development of 5.5 GHZ Dual Polarized Dish Antenna For Ism ApplicationsPundaraja HugarNo ratings yet
- Show Don't Tell: Writing Workshop Practice ExercisesDocument11 pagesShow Don't Tell: Writing Workshop Practice ExercisesChristine Joy Tanglao AsasNo ratings yet
- Mucoadhesive Polymers: Means of Improving Drug Delivery: MucoadhesionDocument4 pagesMucoadhesive Polymers: Means of Improving Drug Delivery: MucoadhesionBrijesh RayNo ratings yet
- Bank of IndiaDocument32 pagesBank of IndiaSushant GuptaNo ratings yet
- ADCD - Approved Labs and CertificationsDocument3 pagesADCD - Approved Labs and CertificationsParth WankhedeNo ratings yet
- BE Civil 1stDocument43 pagesBE Civil 1stOpal G CharyaNo ratings yet
- OWNER'S Manual: Printed in Canada 10/2009Document28 pagesOWNER'S Manual: Printed in Canada 10/2009JanetNo ratings yet
- Steelwork in Action 11Document11 pagesSteelwork in Action 11bachNo ratings yet
- Drawing and SketchingDocument1 pageDrawing and SketchingseanNo ratings yet
- Peter PanDocument6 pagesPeter PanmagtibaydennyNo ratings yet
- 2) When I Went To - University, I Studied - Course in - Psychology Within My Business DegreeDocument25 pages2) When I Went To - University, I Studied - Course in - Psychology Within My Business DegreeShamini Segari GunasakaranNo ratings yet
- Danh Sach DN Nuoc Ngoai Dua Len Website 10.2009Document434 pagesDanh Sach DN Nuoc Ngoai Dua Len Website 10.2009Loan Tran0% (1)
- Junk Food Harmful Effects and SolutionsDocument18 pagesJunk Food Harmful Effects and SolutionsMarcela CoroleaNo ratings yet
- PVA Grade SheetDocument1 pagePVA Grade Sheetabhaygupta1No ratings yet
- 2022 Update - Flash ESPhome On ESP32 ESP2866 NodeMCU BoardDocument6 pages2022 Update - Flash ESPhome On ESP32 ESP2866 NodeMCU Boardh2oo2hNo ratings yet
- Question Bank: 1. Geology and Geophysics 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11Document6 pagesQuestion Bank: 1. Geology and Geophysics 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11Sweta SumanNo ratings yet
- NP 2.0 LabsDocument7 pagesNP 2.0 Labsajei xiaoNo ratings yet
- 37th Mock Test Municipal & Town OfficerDocument5 pages37th Mock Test Municipal & Town OfficerSmart Engineer100% (1)
- NT Toupee Stock Wholesale Prices2023.6.9Document27 pagesNT Toupee Stock Wholesale Prices2023.6.9Mauricio Mendoza HerreraNo ratings yet