Professional Documents
Culture Documents
Dynamic Compactioin Analysis
Uploaded by
Naloan Coutinho sampaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Dynamic Compactioin Analysis
Uploaded by
Naloan Coutinho sampaCopyright:
Available Formats
DYNAMIC COMPACTION ANALYSIS
By Y. K. Chow, 1 Member, ASCE, D. M. Yong, 2
K. Y. Yong, 3 Member, ASCE, and S. L. Lee, 4 Fellow, ASCE
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
ABSTRACT: A simplified model based on the one-dimensional wave equation,
which accounts tor the interaction of the pounder and the soil, and the propagation
of stress wave in the soil during the dynamic compaction of loose granular soil is
presented. The soil beneath the pounder is represented by a nonlinear soil column,
while the surrounding soil is represented by a series of springs and dashpots. The
spring simulates the dynamic soil stiffness and the dashpot accounts for the radiation
damping effect. The input soil parameters of the model can be determined in the
laboratory or estimated from correlations with measured field data. In spite of the
various simplifying assumptions in the model and the predictive method, computed
results, such as pounder penetration and degree and depth of improvement, show
an encouraging measure of agreement with available field measurements from two
dynamic compaction projects. The proposed model is potentially useful for the
analysis of dynamic compaction of loose granular soil.
INTRODUCTION
Dynamic compaction (DC) is a well-established soil improvement tech-
nique used to densify loose deposits of cohesionless soil by means of high-
energy impact. This heavy tamping is achieved by dropping a heavy mass
of 10-40 tonnes from a height generally varying between 10 and 25 m onto
predetermined grid points on the ground. Currently, the performance design
and application of dynamic compaction are, however, still largely empirical
in nature, relying heavily on the designer's experience and judgment. A
pilot test is often carried out at the site to ascertain the operational param-
eters, such as pounder weight, drop height, number of drops per pass, print
spacing, and number of passes, so as to minimize the operational costs. A n
improved but essentially empirical approach of selecting these operational
parameters for D C has been recently suggested (Lo et al. 1990).
The highly complicated soil response during high-energy impact is still
not properly understood. Until now, only a few analytical models have been
suggested to account for the complicated soil behavior during high-energy
impact. Scott and Pearce (1975) suggested a one-dimensional model to
simulate the soil behavior under high-energy impact. The model, however,
appears to have found little practical application. The one-dimensional models
of Mayne and Jones (1983) and Holeyman (1985) appear to have been used
largely to estimate impact stresses. The finite difference and boundary ele-
ment models of Qian (1986), using an empirical soil model, were used to
estimate the penetration of the pounder during impact.
'Sr. Lect., Dept. of Civ. Engrg., Nat. Univ. of Singapore, 10 Kent Ridge Crescent,
Singapore 0511, Republic of Singapore.
2
Res. Asst., Dept., of Civ. Engrg., Nat. Univ. of Singapore, 10 Kent Ridge
Crescent, Singapore 0511, Republic of Singapore.
3
Assoc. Prof., Dept., of Civ. Engrg., Nat. Univ. of Singapore, 10 Kent Ridge
Crescent, Singapore 0511, Republic of Singapore.
4
Emeritus Prof., Dept., of Civ. Engrg., Nat. Univ. of Singapore, 10 Kent Ridge
Crescent, Singapore 0511, Republic of Singapore.
Note. Discussion open until January 1, 1993. To extend the closing date one
month, a written request must be filed with the ASCE Manager of Journals. The
manuscript for this paper was submitted for review and possible publication on April
5, 1991. This paper is part of the Journal of Geotechnical Engineering, Vol. 118, No.
8, August, 1992. ©ASCE, ISSN 0733-9410/92/0008-1141/$1.00 + $.15 per page.
Paper No. 1702.
1141
J. Geotech. Engrg. 1992.118:1141-1157.
A model that is suitable for the analysis of DC must not only be able to
account for the interaction of the pounder and the soil, but must also be
able to account for the propagation of stress waves in the soil during high-
energy impact. In this paper, a simplified model that can predict the crater
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
depth resulting from pounder penetration and the depth and level of soil
improvement beneath the impact location is proposed. Case histories of two
dynamic compaction projects are analyzed to demonstrate the viability of
the proposed model.
ONE-DIMENSIONAL W A V E EQUATION MODEL
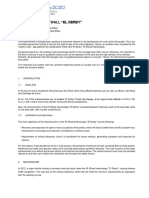
The simplified model proposed herein for dynamic compaction analysis
is an adaptation of a recently developed one-dimensional wave equation
model for pile-driving analysis (Chow et al. 1988; Lee et al. 1988), the main
difference being that the pile is now replaced by a soil column of length
extending at least beyond the anticipated depth of improvement. The effect
of the confining soil, as in the pile problem, is characterized by a series of
springs and dashpots. Both the pounder and soil column are discretized into
one-dimensional elements with an axial mode of deformation connected at
the nodes with the soil springs and dashpots attached to these nodes, as
shown in Fig. 1.
In this dynamic compaction problem, the equation of motion of the soil
column is given by
. d2W
p,A — - + c, MA — - + k.w = 0 (1)
dt dz2
where pv = density of the soil column; A = cross-sectional area of the soil
column and is assumed to be the same as that of the pounder; M = con-
strained modulus of the soil column; cv = dashpot damping coefficient; k,
= soil spring stiffness coefficient; w = vertical displacement; z = depth
coordinate; and t = time. The response of the soil column is approximated
by one-dimensional axial compression of the soil under zero lateral strain
Pounder
ft /^^ /V$s
°'i -iT
s %W
Soil springs j Soil Surrounding
and dashpots ^ 1 1 column soil
777779
n-1
K ftnV*n Simulation of
field problem
One-dimensional
finite element model
FIG. 1. Wave Equation Model for Dynamic Compaction Analysis
1142
J. Geotech. Engrg. 1992.118:1141-1157.
(i.e., uniaxial strain condition). The constrained modulus (M) is used to
characterize the stiffness of the soil column, in part, simulating the effect
of lateral confinement of the soil. The soil spring represents the dynamic
soil stiffness and the dashpot accounts for the radiation damping effect. The
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
equation of motion of the pounder is similar to (1), except that the density
of the soil is replaced by the density of the pounder material (p), and the
axial stiffness is characterized by the Young's modulus of the pounder ma-
terial (£); the frictional resistance at the side of the pounder during pen-
etration, after the crater has been formed, is assumed to be small (i.e., ks
= cs = 0).
Behavior of Soil Column
The behavior of the soil column is highly nonlinear under high-energy
impact during dynamic compaction, and it is approximated by the nonlinear
axial stress-strain behavior of sand in uniaxial strain tests (see Fig. 2). This
stress-strain behavior, which shows a strain-hardening response during virgin
loading, can be determined in a dynamic oedometer test; one such test setup
was described by Heierli (1962). The nonlinear response of the soil can be
characterized using Ginsburg's (1964) model. In this phenomenological soil
model, shown in Fig. 2, the relations for the virgin loading and unloading
curves are given in simple functional forms. For virgin loading, the following
relation is assumed
cr = M„ • (virgin loading) (2)
(8* - E)
where cr = axial stress in soil; M0 = initial tangent constrained modulus of
Axial strain, E
FIG. 2. Phenomenological Soil Model
1143
J. Geotech. Engrg. 1992.118:1141-1157.
the soil; E = axial strain in soil; and s* = asymptotic value of strain. T h e
strain-dependent tangent-constrained modulus (M) is given by t h e differ-
entiation of (2), i.e.
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
da (e^Y
M = — = M0 , "' .,- (virgin loading) (3)
cte (E* — e) z
The soil response during unloading is given by
e = e + T|(E 0 - E) (unloading) (4)
6E*
cr = M 0 (unloading) (5)
(e* - e)
where i| = ratio of residual strain in the unloaded state at b (eb) to peak
strain at state a (e 0 ) (r\ = e t /e„ is a measure of the plastic behavior); and
E^ = corresponding strain on the virgin loading curve at the same stress level
as the strain on the unloading branch (see Fig. 2). Making e the subject of
the relation, (4) now becomes
E - T|S0
-'(T^i) "••(6)
The tangent-constrained modulus during unloading can then be determined
as follows:
,. da (da\/de\ MQ (e*) 2 . , ,. ,
M (unloadmg) (7)
= Ts = U j {Te) = ( T ^ o~=^
A linear stress-strain response is assumed during reloading until the stress
level given by the virgin-loading curve is reached, and thereafter, t h e stress-
strain behavior follows the virgin-loading curve. The linear behavior during
reloading is characterized by the tangent constrained modulus at state b
(see Fig. 2), regardless of whether t h e soil has been completely unloaded.
This phenomenological soil model is characterized by three parameters,
namely, M () , E*, and j \ . T h e parameters M 0 , e*, and r\ can be determined
using Ginsburg's model [(2), (4), and (5)] to fit the measured axial stress-
strain response from dynamic uniaxial strain tests o n sand samples. O n e
such test setup for fairly uniform loose sand of density 1.45 t/m 3 was reported
by Heierli (1962). Two typical axial stress-strain curves of the sand measured
from these tests are shown in Figs. 3(A) and 3(b), corresponding to single
and multiple loading-unloading responses, respectively. The computed axial
stress-strain response using (2), (4), and (5) with parameters M0 = 9.0 MN/
m 2 , E* = 0.45, and t) = 0.8 are also shown in Figs. 3(a) and 3(b). T h e
phenomenological soil model characterized by (2), (4), a n d (5) can be used
to obtain a reasonable fit of the measured response, not only during virgin
loading, but also during unloading as well as reloading.
D u e to the difficulty of obtaining undisturbed samples from t h e site, it
is perhaps preferable to estimate the initial tangent constrained modulus,
M 0 , based on correlation with in situ tests results. O n e such correlation with
the cone resistance of the soil reported by L u n n e and Christoffersen (1983)
is shown in Fig. 4. Sands before dynamic compaction m a y perhaps be as-
sumed to be normally consolidated. N o such correlations are available for
e* and y\. It is, however, of interest to note that analysis of further test
1144
J. Geotech. Engrg. 1992.118:1141-1157.
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
t 8 12
Axial strain (%] Axial strain(%]
(a) Loading and unloading curve (b) Loading,unloading and reloading curve
FiG. 3. Soil R e s p o n s e u n d e r Uniaxial Strain C o n d i t i o n s
•S 300
•5L
//
//
J 250
Ov;r-Consolidated/
| 200 Sands /
•i ' 50
/ //
o
/ //
•E 100
a>
en
t= // ^-^^s
d
z^^Normally Consolidated Sands
~ 50
— o
0 10 20 30 tO 50 60 70
Cone resistance, qc I MN/m')
FIG. 4. Initial T a n g e n t - C o n s t r a i n e d M o d u l u s l o r S a n d s [after L u n n e and Chris-
t o f f e r s e n (1983)]
results of stress-strain response of loose granular soil in uniaxial strain tests,
reported by Phillips and Baladi (1973) and Nelson (1977), shows that e*
and -q are within the ranges 0.4-0.5 and 0.8-0.9, respectively.
Soil Spring Stiffness and Dashpot Coefficients
For the soil springs and dashpots along the shaft of the soil column, the
elastic spring stiffness (ks) and dashpot damping coefficients (cs) are derived
using elasto-dynamic theory (Novak et al. 1978). Under impact loads, the
response of the soil column comprises mostly high-frequency components,
and under this condition, the frequency-dependent ks and cs can be ap-
proximated by the following frequency-independent coefficients (Chow et
al. 1988; Lee et al. 1988)
ks = 2.75G, (8)
cs = 2Ttr0-VpsGs (9)
where ks = soil spring stiffness per unit length of soil column; cs = damping
1145
J. Geotech. Engrg. 1992.118:1141-1157.
coefficient per unit length of soil column; G, = soil shear modulus; and rt)
= soil column radius (or equivalent radius, assuming equal base area, if a
square pounder is used).
At the base of the soil column, the soil behavior is approximated by that
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
of a vertically vibrating rigid disk on the surface of an elastic half-space
(Lysmer and Richart 1966). The approximate values of the frequency-in-
dependent elastic soil spring (k,,) and damping coefficients (c,,) are given by
^ = ( T 3 - ^ •••• "(i°)
C (11)
" = T^T
where v, = soil Poisson ratio. This approximation is somewhat crude, but
it is not critical in the numerical simulation since the base of the soil column
lies beyond the depth of influence.
Vesic et al. (1965) observed experimentally that very rapidly loaded foot-
ings show a punch-through type of failure mode, characterized by near-
vertical slopes of the sides of the depression with little heave of the adjacent
soil. This mode of failure differs from general shear failure observed in
statically loaded footings. This punch-through failure mode is also observed
in DC projects in the field. This effect is simulated in the numerical model
by the penetration of the soil column into the ground through the failure
of the soil springs when they exceed their static resistances. This assumes
the soil springs behave in an elastic-perfectly plastic manner. For granular
soils, the static resistances of the adjacent soil springs can be determined
from
Qs = K,d'v tan ef>Av (12)
Qb = Ny,Ab (13)
where Qs = shaft static resistance at the node; Qh = base resistance; As
= shaft area associated with the node; A,, = base area of soil column; cr',
= vertical effective stress at the appropriate depth; <$> = friction angle of
sand; Ks = coefficient of lateral pressure; and Nq = bearing capacity factor.
NCI is assumed to be similar to that used for pile design and can be obtained
from standard design charts [e.g., Meyerhof (1976)]. When the soil spring
fails, the dashpot is disconnected in the numerical solution, and radiation
damping ceases across the column-soil interface. Radiation damping is re-
established when the spring force becomes less than the static resistance.
In the finite element approach, both the pounder and soil column are
discretized into a number of one-dimensional elements. Each element has
two degrees of freedom, one at each node. Assuming a linear variation in
axial deformation along the element and applying the weighted residual
method [see e.g., Smith and Griffiths (1988)] to (1) gives the following
element matrix equation for the soil column:
32w „ 5w
Mc —r
—2 ++ C — + Kcw + Ksw = 0 (14)
at dt
where Mc = element mass matrix of soil column; C = damping matrix of
dashpot; Kc = element stiffness matrix of soil column; Ks = stiffness matrix
of soil spring; and w = vertical displacement vector. The expressions for
1146
J. Geotech. Engrg. 1992.118:1141-1157.
these standard element matrices can be found, for example, in Smith and
Griffiths (1988). The element matrix equation for the pounder is similar to
(14), except that the soil properties of the soil column are replaced by the
pounder material properties, and that C and K5 are null matrices. These
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
element matrices are assembled in the usual manner leading to the following
global matrix equation for the pounder-soil interaction problem.
M*w + C*w + K*w = 0 (15)
where M*, C*, and K* = the assembled global mass, damping, and stiffness
matrices, respectively; and w, w, and w = the nodal vertical acceleration,
velocity, and displacement vectors, respectively. The global matrix (15) is
solved using a Newmark implicit direct step-by-step integration scheme. The
analysis is performed by prescribing the impact velocity of the pounder to
the associated nodes as the initial condition. The impact velocity can be
obtained from the expression
v = V2g#£ (16)
where v = impact velocity of pounder; g = acceleration due to gravity; H
= height of fall; and £ = efficiency of the drop (£ = 1 for free fall). Some
energy loss can be expected if the pounder is allowed to drop by means of
cable and winch.
In the present work, the tangent stiffness approach is used to compute
the nonlinear response of the soil. A small time step is adopted to allow
the nonlinear stress-strain behavior of the soil column elements as well as
the surrounding soil springs to be followed closely, and the response of the
system is computed incrementally. At the end of each drop, the maximum
incremental strains in these elements are about 8%; for these strain levels,
Teng (1981) showed that for one-dimensional compression analysis of a soil
column, small-strain theory, which is used in the present work, is adequate.
The element sizes in the soil column are updated at the end of each drop
to ensure that small-strain theory is stilf relevant. The complexity of the
present problem, particularly that of the soil behavior, does not merit the
refinement of large-strain theory.
PREDICTIVE PROCEDURE
Dynamic compaction is generally executed by dropping the pounder a
predetermined number of times onto the soil. To begin with, the input soil
parameters for the soil column—M0, ps, E*, and t]—and for the soil springs
and dashpots—G,, p,., vs, cj>, Ks, and Nq—are first estimated. Determination
of the initial tangent constrained modulus (M0) and the soil shear modulus
(G,.) in the laboratory is generally difficult because of problems obtaining
undisturbed samples. It is perhaps preferable to estimate the initial tangent-
constrained modulus of the soil based on correlation with in situ test results,
such as that with cone resistance (qc) shown in Fig. 4. Sands before com-
paction may perhaps be assumed to be normally consolidated. The shear
modulus is then determined from
M(l - 2vs)
Gs (1?)
~ 2(1 - Vl )
The Poisson ratio (vs) for sand generally lies between 0.25 and 0.35, whereas
the soil density (p,.) and friction angle of sand (<}>) can be determined in the
1147
J. Geotech. Engrg. 1992.118:1141-1157.
laboratory. Alternatively, the friction angle of sand can be estimated based
on Meyerhofs (1976) correlation with measured cone resistance (qc).
$ = 29° + 2.5 Vql (qc in MN/m2) (18)
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
The initial Ks can be estimated from the cj> angle from Ks — 1 — sin cj>. The
parameter Nq is assumed to be similar to that used for pile design and can
be obtained from standard design chart [e.g., Meyerhof (1976)]. The pa-
rameters e* and r\, based on the work reported earlier, typically range from
0.4 to 0.5 and 0.8 to 0.9, respectively.
For each drop of the pounder, wave equation analysis is performed by
prescribing the impact velocity of the pounder as given by (16). At the end
of each drop, the analysis gives the pounder penetration and residual axial
stresses and strains in the soil column elements. The element sizes and soil
densities of the soil column elements are then updated for the next drop.
The estimation of the improved soil properties of the soil column after
impact cannot be directly obtained from the simple phenomenological soil
model used. It is, however, plausible to assume the relative density of soil
after impact (£>,.) is related to the residual strains in the soil column elements
(er) by the following relationship
D,. ~ Dri, , , ^r n„ ,
D,,» — £>,.,,/ \e* —
where D,^ = initial relative density of soil; D,., = limiting relative density
of soil (typically 90% to 100%); E0 = initial axial strain (= 0); and e* =
limiting strain (typically 0.4-0.5). The initial relative density of soil can be
determined in the laboratory or estimated based on Meyerhofs (1976) cor-
relation with the friction angle, estimated from cone resistance using (18),
i.e.
cf> = 28° + 15°D, (20)
Schmertmann's (1976) correlation of relative density with measured cone
resistance, which is commonly used, is strictly applicable to normally con-
solidated sands only. If the sand is overconsolidated, which is relevant to
sand after DC, the measured cone resistance must first be transformed to
that of an equivalent normally consolidated sand before the correlation can
be used. However, the coefficient of lateral pressure, which is the essential
parameter of this transformation, is difficult to determine, and the results
are sensitive to this parameter. The improved friction angle of sand after
DC can be estimated from (20) using the improved Dr from (19). The
improved soil density (ps) can be estimated using
Pmax(A 9min
Dr = ~ \ (21)
PsVrmax Pmin/
where pmax and pmin = maximum and minimum dry soil densities, respec-
tively; these values can be determined in the laboratory. However, pmax and
pmin may change as a result of crushing of the sand grains during the com-
paction process. Nevertheless, the numerical results were not sensitive to
this approximation, since ps lies within a narrow range.
The impact of the pounder will improve not only the properties of the
soil directly beneath it, but the surrounding soil as well, although to a
somewhat lesser extent, and this effect reduces with distance from the point
1148
J. Geotech. Engrg. 1992.118:1141-1157.
of impact. However, the model only predicts the improvement of soil directly
beneath the pounder; the lateral extent of improvement in the surrounding
soil is a subject for future study. Since the soil properties immediately
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
adjacent to the soil column would be quite similar to those of the soil column,
the improvement of the surrounding soil may be approximated by updating
the soil parameters of the soil springs and dashpots before the analysis for
the next drop. The improved cone resistances are first estimated from the
updated friction angles based on (18). The constrained moduli are then
estimated from the curve for overconsolidated sands in Fig. 4, and there-
after, the soil shear moduli of the soil springs and dashpots are determined
using (17). Because of the difficulty quantifying the effect of compaction
on the coefficient of lateral pressure (Ks), this parameter after impact is
estimated based on a similar relationship given in (19), except that the
relative densities of soil are replaced by the corresponding coefficients of
lateral pressure. There is some evidence to suggest that Ks of overconsoli-
dated sands lies in the range of 1.2 to 2.0 [see Baldi et al. (1982)], and
hence, the limiting coefficient of lateral pressure can be taken as 2.0. The
parameter Nq for the base of the soil column that is beyond the depth of
influence is generally unchanged. It is, however, noted that the computed
pounder penetration and degree and depth of improvement of the soil,
which are essentially governed by the nonlinear behavior of the soil column,
are found to be insensitive to the updating of the soil parameters of the soil
springs and dashpots.
For the next drop, the soil elements in the soil column take on the residual
axial stresses and strains from the previous drop. The degree and depth of
improvement of the soil in the soil column in terms of relative density or
friction angle can then be estimated by comparing these values after the
last drop in the pass with that before DC.
If more than one pass is executed, the infilling of the crater using loose
sand can be simulated in the model by adding new soil elements to the top
of the existing soil column until its new level is reached. The soil properties
of these new elements can be estimated from typical values corresponding
to loose sand. These new soil elements and their adjacent soil springs will
have zero initial stress and strain, unlike the existing soil elements. The
analysis can then be repeated.
This predictive procedure is summarized in a step-by-step manner as
follows.
1. Discretize the pounder and the soil column into one-dimensional elements.
2. Determine the input parameters.
A. Pounder: E and p.
B. Soil column elements: M0, e*, T|, and ps.
C. Soil springs and dashpots: Gs, p„ vs, (j>, Ks, and Nq.
3. For each drop in the pass:
A. Perform wave equation analysis using estimated impact velocity of the
pounder. The analysis gives the pounder penetration and residual axial
stresses and strains in the soil column elements.
B. Update the soil column element sizes, the densities of the soil column
elements, and the parameters of the soil springs and dashpots for the
next drop.
4. At the end of the pass, obtain the cumulative pounder penetration, relative
density, and friction angle of the improved soil in the soil column elements.
1149
J. Geotech. Engrg. 1992.118:1141-1157.
5. If there is more than one pass, simulate infilling of the crater with new
soil elements and estimate soil properties (see step 2). Repeat steps 3 and 4.
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
CASE STUDIES
The one-dimensional wave equation model was validated for small strain
levels in the soil with the results of a related theoretical problem of an
impulsively loaded circular footing resting on a linear elastic half-space and
a laboratory impact test on a circular surface footing on sand (Chow et al.
1991). The numerical solutions agreed closely with the analytical solutions
and the laboratory test results. Available data from two case histories of
DC are analyzed herein to assess the viability of the proposed wave equation
model in predicting the improvement of soil due to high-energy impact in
the field.
Indianapolis Site (Leonards et al. 1980)
In this project, a warehouse was to be constructed on an old spoil site.
Prior to the construction of the warehouse, DC was used to densify the
granular fill. The spoil materials were loose, fine-to-medium sand with thin
gravelly seams of medium-dense sand. The amount of fines passing the U.S.
Number 200 sieve range from 2% to 10%. The original ground surface and
the ground water were about 5 m and 9 m below the surface of the old spoil
fill, respectively.
A preliminary trial was conducted using a 4.1-tonne pounder dropped
from a height of 9 m height in a pattern shown in Fig. 5. The 1.22-m-square
pounder was dropped at drop point 1 (seven drops), followed by drop point
2 (seven drops), and finally, drop point 3 (five drops), in between the two
earlier drop points. Before compaction, the cone penetration test (CPT)
was carried out at location CI (see Fig. 5), which lies outside the area to
be compacted, and the results are shown in Fig. 6(a). The cone resistance
values (c/(.) measured at location C2 (see Fig. 5) after compaction are also
shown in Fig. 6(a). The level of compaction achieved was insufficient for
the requirements of the project (qc s 60 kg/cm2 to an effective depth of 5.5
m). In another trial, a 5.9-tonne pounder was dropped from a height of 12
m in a print pattern similar to that shown in Fig. 5. This energy level was
eventually selected for the main DC works. The qc values measured before
and after DC at footing H-l during the main works are shown in Fig. 6(b).
The cone resistance-versus-depth profiles obtained before DC at CI and
H-l were used to estimate the input soil parameters for the wave equation
analyses of the preliminary trial and main DC works at footing H-l following
the aforementioned procedure. In both cases, the soil columns extend to
the underlying sandy clay, about 5 m below the surface, the soil conditions
below which were not available. The range of initial tangent-constrained
moduli of the soil estimated from the curve for normally consolidated sands
in Fig. 4 was: preliminary trial, 8 MN/m 2 -20 MN/m2, and footing H-l, 12
MN/m 2 -60 MN/m2. In both cases, the soil parameters e* and -q in the
Ginsburg model were assumed to be 0.45 and 0.85, respectively. The limiting
relative density (Dr,) and Poisson ratio (vv) of the sand making up the soil
column were assumed to be 90% and 0.33, respectively. In the absence of
experimental data, the initial friction angle, relative density, and soil density
were estimated using (18), (20), and (21), respectively. The soil densities
pm;ix and pmin used in (21) were assumed to be 1.85 t/m3 and 1.35 t/m3,
respectively [see Lambe and Whitman (1979)]. The soil parameters of the
1150
J. Geotech. Engrg. 1992.118:1141-1157.
Drop point 1 Drop point 3 Qrop point 2
17 drops] |5 drops) (7 drops)
I --j , _-, , 1
i !
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
4-
r'L re ...,„•
i
!i #f + CPI CI
Cent of print !i CPTC2
I I I ____J I
1.22 m 0.30 m
FIG. 5. Indianapolis Site: Drop Pattern and Location of CPT at Preliminary Trial
Cone resistance,qc (kg/cm I Cone resistance, q c I kg/cm 2 ]
0 20 U) 60 60 100 50 100 150 200 250
Sand
Clay
(o| Preliminary trial (b| Footing H-l
FIG. 6. Indianapolis Site: CPT Results before and after DC
sandy clay at the base of the soil column were assumed to be as follows:
Poisson ratio of 0.4, density of 1.8 t/m3, undrained shear strength (c„) of
120 kN/m2 (estimated from cone resistance), shear modulus of 150 c„, and
ultimate bearing pressure of 9 c„.
The computed crater depth after each drop in the preliminary trial is
shown in Fig. 7, and the results agree reasonably well with the measured
values at drop point 1. No crater depth measurements at footing H-l were
reported. The friction angle and relative density profiles before and after
DC for the trial, estimated from correlations with measured cone resistance
[see Fig. 6(A)] using (18) and (20), are shown in Fig. 8(a). Before compac-
tion, the friction angle was typically 31°, corresponding to a relative density
of about 30%. After compaction, the friction angle of sand in the top 3 m
of the soil column was improved to about 33.5°, corresponding to a relative
density of about 40%. The computed relative density and friction angle
profiles, shown in Fig. 8(a) are slightly greater than those estimated from
the correlations with measured cone resistances throughout the entire depth
of the soil column. However, the computed results for the relative density
and friction angle profiles after DC at the location of footing H-l during
the main works, shown in Fig. 8(b), agree reasonably well with those es-
timated from correlations with the measured cone resistance.
Kampung Pakar Site, Malaysia
The site is in the Sungei Besi area near the Kuala Lumpur-Seremban
Highway, approximately 15 km from Kuala Lumpur, Malaysia. Phase I of
1151
J. Geotech. Engrg. 1992.118:1141-1157.
Number of drops
2 I 6
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
FIG. 7. Indianapolis Site: Crater Depth during Preliminary Trial
Friction angle, f Friction angle, f
35 U 35 U>
Before
OC " H
- - A f t e r OC
- Estimated
from q c
- /—*'"" Computed
20 U 60 BO 100 20 to
Relative density,0r |%| Relative density, Dr (%)
(a) Preliminary trial (b) Footing H - 1
FIG. 8. Indianapolis Site: Soil Improvement Results
the project comprises a residential development of eight blocks of five-story
medium-cost flats over an area of about 6 ha (15 acres). The soil condition
and measured cone resistance at block C, where soil improvement by DC
was used, are shown in Fig. 9. The soil deposit consisted of 14 m of loose
sand with a layer of silty clay sandwiched between 10 to 12 m; limestone
bedrock was located at a depth of 14 m. The water table was about 3 m
below the surface. In the field trial, the soil treatment consisted of dropping
a 1.83-m-square pounder weighing 15 tonnes from a maximum drop height
of 25 m for three passes over a 6-m x 6-m grid pattern. In the first pass,
the pounder was dropped 10 times from 20 m, whereas in the second pass,
the number of drops was reduced to six, but the drop height increased to
25 m. The third pass, which was an ironing pass, was executed by dropping
the same pounder four times from 6 m over a 4-m x 4-m grid pattern.
These operational parameters were later adopted for the main DC works.
1152
J. Geotech. Engrg. 1992.118:1141-1157.
Cons resistance, q c (l<g/cnr)
0 50 100 150 200
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
_ U _ Water tcKe
loose to
medium
sands
silty
clay
loose
sands
limestone
FIG. 9. Ksmpung Pakar Site: CPT Results before and after DC
Cone penetration test results carried out at the impact point (F6) before
compaction as well as after each pass are shown in Fig. 9.
In the analysis, the cone penetration resistance profile measured before
DC was used to estimate the soil properties of the 14-m-deep soil column,
as well as the surrounding soil springs and dashpots. In the top 10 m and
between 12- and 14-m depth, which comprised mostly loose sand, the initial
tangent-constrained modulus, friction angle, and relative density were es-
timated using the curve for normally consolidated sands in Fig. 4, (18), and
(20), respectively. The friction angle of this sand ranged from 33° to 37°,
whereas its relative density ranged typically from 30% to 60%. The param-
eter Ks [~l — sin(4>)] was about 0.4-0.46. The Poisson ratio of the sand
was assumed to be 0.33, and the soil density was estimated from initial
relative density using (21); the densities pmax and pmin were assumed to be
1.85 t/m3 and 1.35 t/m3, respectively [see Lambe and Whitman (1979)]. The
remaining soil parameters for the sand assumed in the analysis were: Dr,
= 90%, e* = 0.45, and T\ = 0.85. The silty clay found between 10 to 12
m is below the anticipated depth of improvement, and hence, it is reasonable
to assume its behavior to be linear elastic. The soil parameters of the silty
clay were assumed as follows: Poisson ratio of 0.4, density of 1.8 t/m3,
undrained shear strength (c„) of 115 kN/m2 (estimated from the measured
cone resistance), and shear modulus of 150 c„. The density, Poisson ratio,
and shear modulus of the underlying limestone, located 14 m below the
surface, were assumed to be 1.8 t/m3, 0.25, and 60 MN/m2, respectively. It
is noted that the underlying limestone that was beyond the depth of im-
provement has little influence on the response of the soil column.
The computed crater depth (cumulative pounder penetration) after each
drop in the first pass is shown in Fig. 10(a). The computed results show
reasonably good agreement with the field measurements at the impact point
(F6) and another impact point just next to it. As shown in Fig. 10(b), the
computed relative density and friction angle profiles after the first pass,
following the procedure described in the earlier section, also agree reason-
ably well with those estimated using Meyerhofs (1976) correlations, given
in (18) and (20). The friction angle and relative density profiles before DC,
estimated from the measured cone resistance values at the impact point
1153
J. Geotech. Engrg. 1992.118:1141-1157.
Number of drops Friction angle, f
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
0 20 1.0 SO 10 100
Relative density, Dr(%)
(a) Crater depth (b) Friction angle and relative density
of soil versus depth
FIG. 10. Kampung Pakar Site: Computed and Measured Results after First Pass
Number of drops Friction angle, $'
0 2 t 6 8 10 30 35 10
Or 1 i — 1 1
Mtosuied IFS1
p — Computed
inn .
(a) Crater depth (b) Friction angle and relative density
of soil versus depth
FIG. 1 1 . Kampung Pakar Site: Computed and Measured Results after Second
Pass
(F6), are also included to show the improvement achieved after the first
pass.
For the second pass, the infilling of the crater depth from the first pass
was simulated by adding new soil elements to the existing soil column and
the analysis repeated as in the first pass. The computed crater depth after
each drop in the second pass is shown in Fig. 11(a), and the results compare
favorably with the field measurements at the impact point (F6). As shown
in Fig. 11(b), the computed relative density and friction angle profiles after
the second pass also agree reasonably well with those estimated from cor-
relations with the measured cone resistances. The influence of ground water
was not considered in the wave equation model. Nevertheless, it appears
1154
J. Geotech. Engrg. 1992.118:1141-1157.
that if the water table is below the final crater depth, its influence may not
be that significant, at least for this case history.
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
CONCLUSIONS
A theoretical framework for the dynamic compaction analysis of loose
cohesionless soils has been presented. The approach uses a simplified yet
effective model based on the one-dimensional wave equation. The punch-
through phenomenon of the soil, the propagation of stress waves in the soil
column, and the loss of energy through the soil mass due to radiation
damping have been properly accounted for. The wave equation model uses
conventional soil mechanics parameters and parameters that can be either
correlated with measurable soil properties or determined experimentally.
In spite of the various simplifications introduced into the model and pre-
dictive procedure, the pounder penetration, the degree and depth of im-
provement in terms of the relative density, and friction angle of the soil can
be reasonably predicted, and the results compare favorably with field results
obtained from two case histories. However, further verifications of the
model are necessary to develop it into a reliable predictive method. This
simplified model is potentially useful and will help to provide a better under-
standing of the dynamic compaction process. This may in due course provide
a more rational method of analysis than the current empirical method, which
involves a substantial amount of costly and time-consuming field trials.
ACKNOWLEDGMENTS
The work upon which the paper is based is funded by the National Science
and Technology Board of Singapore under the R D A S grant number ST/86/
05.
APPENDIX I. REFERENCES
Baldi, G., Bellotti, R., Ghionna, V., Jamiolkowski, M., and Pasqualini, E. (1982).
"Design parameters for sands from CPT." Proc. 2nd Eur. Symp. on Penetration
Testing, International Society for Soil Mechanics and Foundation Engineering,
425-432.
Chow, Y. K., Wong, K. Y., Karunaratne, G. P., and Lee, S. L. (1988). "Wave
equation analysis of piles—A rational theoretical approach." Proc. 3rd Int. Conf.
Application of Stress—Wave Theory on Piles, Canadian Geotechnical Society, 208-
218.
Chow, Y. K., Yong, D. M., Yong, K. Y., and Lee, S. L. (1991). "Numerical
modelling of dynamic compaction." Proc. 7th Int. Conf. on Computer Methods
and Advances in Geomechanics, International Association for Computer Methods
and Advances in Geomechanics, 237-242.
Ginsburg, T. (1964). "Propagation of shock waves in the ground." /. Soil Mech.
Found. Div., ASCE, 90(1), 125-163.
Heierli, W. (1962). "Inelastic wave propagation in soil columns." /. Soil. Mech.
Found. Div., ASCE, 88(6), 33-63.
Holeyman, A. (1985). "Unidimensional modellization of dynamic footing behavior."
Proc. 11th Int. Conf. on Soil Mech. and Found. Engrg., International Society for
Soil Mechanics and Foundation Engineering, 761-764.
Lambe, T. W., and Whitman, R. V. (1979). Soil mechanics. John Wiley and Sons,
New York, N.Y.
Lee, S. L., Chow, Y. K., Karunaratne, G. P., and Wong, K. Y. (1988). "Rational
wave equation model for pile driving analysis." /. Geotech. Engrg., ASCE, 114(3),
306-325.
1155
J. Geotech. Engrg. 1992.118:1141-1157.
Leonards, G. A., Cutter, W. A., and Holtz, R. D. (1980). "Dynamic compaction
of granular soil." J. Geotech. Engrg. Div., ASCE, 106(1), 35-44.
Lo, K. W., Ooi, P. L., and Lee, S. L. (1990). "Unified approach to ground im-
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
provement by heavy tamping." /. Geotech. Engrg., ASCE, 116(3), 514-527.
Lunne, T., and Christoffersen, H. P. (1983). "Interpretation of cone penetrometer
data for offshore sands." Report 52108-15, Norwegian Geotech. Inst., Oslo, Nor-
way.
Lysmer, J., and Richart, F. E. (1966). "Dynamic response of footings to vertical
loading." J. Soil. Mech. Found. Div., ASCE, 92(1), 65-69.
Mayne, P. W., and Jones, J. S. (1983). "Impact stresses during dynamic compaction."
/. Geotech. Engrg., ASCE, 109(10), 1342-1347.
Meyerhof, G. G. (1976). "Bearing capacity and settlement of pile foundations." /.
Geotech. Engrg. Div., ASCE 102(1), 197-259.
Nelson, I. (1977). "Numerical solution of problems involving explosive loading."
Proc. Dynamic Methods in Soil and Rock Mechanics, Vol. 2: Plastic and long-term
effects in soils, A. A. Balkema, Rotterdam, the Netherlands.
Novak, M., Nogami, T., and Aboul-Ella, F. (1978). "Dynamic soil reactions for
plane strain case." /. Engrg. Mech. Div., ASCE, 104(4), 953-959. :
Phillips, B. R., and Baladi, G. Y. (1973). "Results of two free-field code calculations
versus field measurements for the distant plain 1A event." Misc. Paper S-73-21,
U.S. Army Engr. Waterways Experiment Station, Vicksburg, Miss.
Qian, J. H. (1986). "Dynamic consolidation from practice to theory." 8th Asian
Regional Conf. on Soil Mechanics and Found. Engrg., Japanese Society for Soil
Mechanics and Foundation Engineering, 2, 213-217.
Schmertmann, J. H. (1976). "An updated correlation between relative density, Dr
and Fugro-type electric cone bearing, qc." Contract report DACW39-76-M 6646,
U.S. Army Waterways Experiment Station, Vicksburg, Miss.
Scott, R. A., andPearce, R. W. (1975). "Soil compaction by impact." Geotechnique,
25(1), 19-30.
Smith, I. M., and Griffiths, D. V. (1988). Programming the finite element method,
with application to geomechanics. 2nd Ed., John Wiley and Sons, Chichester,
England.
Teng, C. K. (1981). "The influence of geometric non-linearity in geomechanics,"
M.Sc. thesis, Univ. of Manchester, Manchester, U.K.
Vesic, A. S., Banks, D. C , and Woodard, J. M. (1965). "An experimental study
of dynamic bearing capacity of footings on sand." Proc. 6th Int. Conf. on Soil
Mech. and Found. Engrg., International Society for Soil Mechanics and Foundation
Engineering, 2, 209-213.
APPENDIX II. NOTATION
The following symbols are used in this paper:
A = cross-sectional area of soil column;
As = shaft area associated with node;
Ab = base area of soil column;
cb = dashpot coefficient at base of soil column;
cs = shaft dashpot coefficient per unit length of soil column;
Dr = relative density of soil;
D,.Q = initial relative density of soil;
Dr* = limiting relative density of soil;
E = Young's modulus of pounder material;
Gs = soil shear modulus;
Ks = coefficient of lateral pressure;
kh = soil spring coefficient at base of soil column;
ks = shaft soil spring stiffness coefficient per unit length of soil column;
1156
J. Geotech. Engrg. 1992.118:1141-1157.
= constrained modulus;
= initial constrained modulus;
= bearing capacity factor;
= base static resistance;
Downloaded from ascelibrary.org by MASS INSTITUTE OF TECHNOLOGY on 05/12/13. Copyright ASCE. For personal use only; all rights reserved.
= shaft static resistance associated with node;
= cone resistance;
= radius of pounder;
= nodal displacement;
= axial strain in soil column;
= corresponding strain in loading curve at the same stress level (see
Fig. 2);
ea = peak axial strain at state a;
Eb = residual axial strain at state b;
e,. = residual strain in soil column;
e* = limiting strain;
T| = ratio of residual strain to peak strain ( = e6/e„);
vs = Poisson's ratio;
p = density of pounder material;
p,. = soil density;
Pmax = maximum dry density of soil;
=
Pmin minimum dry density of soil;
o- = axial stress in soil column;
a'v = effective vertical stress; and
c|) = angle of friction of sand.
1157
J. Geotech. Engrg. 1992.118:1141-1157.
You might also like
- RippleTankSE Key PDFDocument10 pagesRippleTankSE Key PDFYesi Setyo Ningrum100% (1)
- Jean Epstein - MagnificationDocument18 pagesJean Epstein - MagnificationPhoronidNo ratings yet
- Comparing Advanced Constitutive Models in Stability Analysis of Slopes On Liquefiable Layers Under Seismic Loading ConditionsDocument9 pagesComparing Advanced Constitutive Models in Stability Analysis of Slopes On Liquefiable Layers Under Seismic Loading ConditionsJUAN JOSE VALDIVIA CARBAJALNo ratings yet
- Non-invasive soil damping measurements using surface wavesDocument11 pagesNon-invasive soil damping measurements using surface wavesBrandon Nova AndlerNo ratings yet
- Seismic Fragility Curves For Shallow Circular Tunnels Under Different Soil Conditions PDFDocument7 pagesSeismic Fragility Curves For Shallow Circular Tunnels Under Different Soil Conditions PDFAhmed KhalafNo ratings yet
- Unified Method For Estimating The Ultimate BearingDocument11 pagesUnified Method For Estimating The Ultimate BearingLuisRodrigoPerezPintoNo ratings yet
- Wick Drain - Smear ZoneDocument5 pagesWick Drain - Smear ZonehamidkarimpourNo ratings yet
- Bathnagar Et Al 2016Document13 pagesBathnagar Et Al 2016Marcelo CifuentesNo ratings yet
- (1978) OTC 3309, Pile Response To Dynamic Lateral LoadingDocument5 pages(1978) OTC 3309, Pile Response To Dynamic Lateral LoadingRaghu MahadevappaNo ratings yet
- Ground Movement Prediction For Deep Excavations in Soft ClayDocument13 pagesGround Movement Prediction For Deep Excavations in Soft Clayvanness hoNo ratings yet
- Dynamic Analysis For Foundation of Vibrating EquipmentsDocument6 pagesDynamic Analysis For Foundation of Vibrating Equipmentstanha56313955No ratings yet
- Bayat and Ghalandarzadeh 2020Document15 pagesBayat and Ghalandarzadeh 2020Yutang ChenNo ratings yet
- 09nashed Granular Piles LiquefactionDocument7 pages09nashed Granular Piles LiquefactionRene RoblesNo ratings yet
- Chai 1999Document11 pagesChai 1999RivaiNo ratings yet
- (Asce) 1090-0241 (2005) 131 12 (1466)Document14 pages(Asce) 1090-0241 (2005) 131 12 (1466)rdey36886No ratings yet
- Traffic-Load-Induced Permanent Deformation of Road On Soft SoilDocument10 pagesTraffic-Load-Induced Permanent Deformation of Road On Soft SoilAyush KumarNo ratings yet
- Tunnel Face ClsDocument18 pagesTunnel Face ClsParmeshwar KushwahaNo ratings yet
- Dynamic Stiffness of Foundations On Inhomogeneous Soils For A Realistic Prediction of Vertical Building ResonanceDocument13 pagesDynamic Stiffness of Foundations On Inhomogeneous Soils For A Realistic Prediction of Vertical Building Resonancevale ramirezNo ratings yet
- Experimental Study of Shape and Depth Factors and Deformations of Footings in SandDocument15 pagesExperimental Study of Shape and Depth Factors and Deformations of Footings in SandOum MahmdNo ratings yet
- Bearing Capacity of Foundations On A Weak Sand Layer Overlying A Strong DepositDocument5 pagesBearing Capacity of Foundations On A Weak Sand Layer Overlying A Strong DepositHelena LeonNo ratings yet
- Ground Vibrations Caused by Soil Compaction: July 2021Document14 pagesGround Vibrations Caused by Soil Compaction: July 2021Liv CBNo ratings yet
- Wave Diffraction Due To Areas of Energy DissipationDocument13 pagesWave Diffraction Due To Areas of Energy Dissipationruxandra tudorascuNo ratings yet
- Rayamajhi Et Al Granular Columns Stress Reduction JGGE 2016Document11 pagesRayamajhi Et Al Granular Columns Stress Reduction JGGE 2016Angela GonzálezNo ratings yet
- Analytical Method For Determining Bearing CapacityDocument15 pagesAnalytical Method For Determining Bearing Capacityce210004048No ratings yet
- Analysis of Tunneling-Induced Ground Movements Using Transparent Soil ModelsDocument11 pagesAnalysis of Tunneling-Induced Ground Movements Using Transparent Soil ModelsAnonymous zpNy2bltNo ratings yet
- Zhang Et Al 2022 3d Numerical Analysis of A Single Footing On Soft Soil Reinforced by Rigid InclusionsDocument13 pagesZhang Et Al 2022 3d Numerical Analysis of A Single Footing On Soft Soil Reinforced by Rigid InclusionsxfvgNo ratings yet
- 290733-93992912428921%29Document8 pages290733-93992912428921%29TaoNo ratings yet
- Stav Rid Is 2002Document7 pagesStav Rid Is 2002Franshesco Palma GuillenNo ratings yet
- 1984 - Zaman - Interface Model For Dynamic Soil-Structure InteractionDocument17 pages1984 - Zaman - Interface Model For Dynamic Soil-Structure InteractionpouyaNo ratings yet
- 1981 Machine Foundatios On Deposits of Soft Clay Overlain by A Weathered CrustDocument12 pages1981 Machine Foundatios On Deposits of Soft Clay Overlain by A Weathered CrustBilal LoveNo ratings yet
- (ASCE) EM.1943-7889.0001174Memory Surface Hardening Model For Granular Soils UnderDocument14 pages(ASCE) EM.1943-7889.0001174Memory Surface Hardening Model For Granular Soils UnderMelete GashawNo ratings yet
- Dynamic Behaviour of Earth Dams For Variation of Earth Material StiffnessDocument6 pagesDynamic Behaviour of Earth Dams For Variation of Earth Material StiffnessFrancisco Venegas ConradsNo ratings yet
- Wave Propagation Attenuation and Threshold Strains of Fully Saturated Soils With Intraparticle VoidsDocument11 pagesWave Propagation Attenuation and Threshold Strains of Fully Saturated Soils With Intraparticle VoidsPinak RayNo ratings yet
- The New Empirical Formula Based On Dynamic Probing Test Results in Fine Cohesive SoilsDocument9 pagesThe New Empirical Formula Based On Dynamic Probing Test Results in Fine Cohesive SoilsEmiliano AgostiniNo ratings yet
- Simplified Approach For Soil-Spring Stiffness Prediction of Pile GroupDocument12 pagesSimplified Approach For Soil-Spring Stiffness Prediction of Pile Groupabualamal100% (1)
- Comparison and Improvement of Existing CPT Shear Wave Velocity Correlations for Hungarian SoilsDocument10 pagesComparison and Improvement of Existing CPT Shear Wave Velocity Correlations for Hungarian SoilsDariusz GuzikNo ratings yet
- 1999 Bruno-Randolph-1999-dynamic-and-static-load-testing-of-model-piles-driven-into-dense-sandDocument11 pages1999 Bruno-Randolph-1999-dynamic-and-static-load-testing-of-model-piles-driven-into-dense-sandlbiNo ratings yet
- 1 - Depth of Fixity of Piles in Clay Under Dynamic Lateral PDFDocument15 pages1 - Depth of Fixity of Piles in Clay Under Dynamic Lateral PDFSwapan PaulNo ratings yet
- Performance of Embankment Stabilized With Vertical Drains On Soft ClayDocument17 pagesPerformance of Embankment Stabilized With Vertical Drains On Soft ClayCEG BangladeshNo ratings yet
- Jggefk Gteng-10435Document12 pagesJggefk Gteng-10435Bilal AdeelNo ratings yet
- 1988 Wilcox PDFDocument12 pages1988 Wilcox PDFcjunior_132No ratings yet
- Background: Soil-Structure Interaction of Offshore Wind TurbinesDocument1 pageBackground: Soil-Structure Interaction of Offshore Wind Turbinesali381No ratings yet
- Greenwood 1970Document12 pagesGreenwood 1970Mohammed KhennoufNo ratings yet
- Insight Into The Seismic Liquefaction Performance of Shallow FoundationsDocument9 pagesInsight Into The Seismic Liquefaction Performance of Shallow FoundationsMario Colil BenaventeNo ratings yet
- Fahoum 1996Document8 pagesFahoum 1996vokurNo ratings yet
- Influence of Clods On The Hydraulic Conductivity of Compacted ClayDocument18 pagesInfluence of Clods On The Hydraulic Conductivity of Compacted Clayyzz36520No ratings yet
- Physical Modelling of Low-Energy Dynamic PDFDocument12 pagesPhysical Modelling of Low-Energy Dynamic PDFfathiafsharNo ratings yet
- Bearing Capacity of Shallow Foundations On Unsaturated SoilsDocument17 pagesBearing Capacity of Shallow Foundations On Unsaturated Soilsce210004048No ratings yet
- Liu 2014Document9 pagesLiu 2014Abel AbelNo ratings yet
- Tensile and Shear Failure Behaviour of Compacted Clay - Hybrid Failure ModeDocument12 pagesTensile and Shear Failure Behaviour of Compacted Clay - Hybrid Failure ModeJagan JNo ratings yet
- Dove 1999Document12 pagesDove 1999faizan iqbalNo ratings yet
- Advanced Imaging and Inversion For Oil Production Estimates in Unconventional Resource PlaysDocument5 pagesAdvanced Imaging and Inversion For Oil Production Estimates in Unconventional Resource PlaysJian YangNo ratings yet
- Wu Et Al 1989 Validity of Smith Model in Pile Driving AnalysisDocument18 pagesWu Et Al 1989 Validity of Smith Model in Pile Driving Analysis叶晓平No ratings yet
- Rollins 1998Document10 pagesRollins 1998ahxssdswfwNo ratings yet
- By George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806Document10 pagesBy George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806PoYing HuangNo ratings yet
- Hydrodynamic and Foundation Interaction Effects in Earthquake Response of A Concrete Gravity DamDocument14 pagesHydrodynamic and Foundation Interaction Effects in Earthquake Response of A Concrete Gravity DamremyanrNo ratings yet
- Capturing Nonlinear Vibratory Roller Compactor Behavior Through Lumped Parameter ModelingDocument10 pagesCapturing Nonlinear Vibratory Roller Compactor Behavior Through Lumped Parameter Modelingzhizhang5591No ratings yet
- Abu Hejleh1996Document7 pagesAbu Hejleh1996Flávia GomesNo ratings yet
- Hofman PDFDocument6 pagesHofman PDFAbrahan Eriquita MamaniNo ratings yet
- (Priebe) - The Design of Vibro ReplacementDocument17 pages(Priebe) - The Design of Vibro ReplacementNaloan Coutinho sampaNo ratings yet
- The El Derby Reinforced Soil WallDocument8 pagesThe El Derby Reinforced Soil WallNaloan Coutinho sampaNo ratings yet
- Design of Parking Lot Pavement For Heavy Container Carriers With Geosynthetic Reinforcement Case StudyDocument6 pagesDesign of Parking Lot Pavement For Heavy Container Carriers With Geosynthetic Reinforcement Case StudyNaloan Coutinho sampaNo ratings yet
- Canal Lining With EPDM GeomembranesDocument1 pageCanal Lining With EPDM GeomembranesCristian Andrés Rodríguez CuellarNo ratings yet
- Numerical Modelling of Rayleigh Wave Propagation in Course of Rapid Impulse CompactionDocument7 pagesNumerical Modelling of Rayleigh Wave Propagation in Course of Rapid Impulse CompactionNaloan Coutinho sampaNo ratings yet
- TA Numeric ModellingDocument200 pagesTA Numeric ModellingAnggi Masniari SimanjuntakNo ratings yet
- Numerical Modelling of The Densification of Municipal Solid Waste Landfills UsingDocument10 pagesNumerical Modelling of The Densification of Municipal Solid Waste Landfills UsingNaloan Coutinho sampaNo ratings yet
- Mechanical Measurements Lab ManualDocument26 pagesMechanical Measurements Lab ManualseminarprojectNo ratings yet
- Ece V Digital Signal Processing (10ec52) NotesDocument161 pagesEce V Digital Signal Processing (10ec52) NotesrafeshNo ratings yet
- Sop ExcelDocument104 pagesSop ExcelRizky C. AriestaNo ratings yet
- The Ratio of Voltage and Electric Current in A Closed CircuitDocument12 pagesThe Ratio of Voltage and Electric Current in A Closed Circuitzunaira123478% (9)
- Euchner Esm Ba 301 - Bfb0471cca PDFDocument39 pagesEuchner Esm Ba 301 - Bfb0471cca PDFJorge SilvaNo ratings yet
- Ansys FlutterDocument2 pagesAnsys Flutterfhd_bdNo ratings yet
- Physics P4Document23 pagesPhysics P4newspaperNo ratings yet
- CESURVE Problem Set 1Document2 pagesCESURVE Problem Set 1Rheina VelasquezNo ratings yet
- Mechanical Design of A Robot's Gripper: Degree of Industrial Technologies Final Individual ProjectDocument108 pagesMechanical Design of A Robot's Gripper: Degree of Industrial Technologies Final Individual ProjectMzimasi MjanyelwaNo ratings yet
- Chapter 1 Chem ReviewerDocument4 pagesChapter 1 Chem ReviewerMatt DLSNo ratings yet
- Capture a wide range of tones with proper exposure and developmentDocument8 pagesCapture a wide range of tones with proper exposure and developmentTunisha SharmaNo ratings yet
- SAP 2000 Structural Analysis and Design Training CourseDocument40 pagesSAP 2000 Structural Analysis and Design Training CourseSomaNo ratings yet
- BLACK BOX AIRCRAFT RECORDERDocument14 pagesBLACK BOX AIRCRAFT RECORDERGnani ReddyNo ratings yet
- FMEM MCQsDocument162 pagesFMEM MCQsjawaliyaabhishek1312No ratings yet
- Experimental Modeling of Temperature Rise in Mass ConcreteDocument8 pagesExperimental Modeling of Temperature Rise in Mass Concretecalvin wongNo ratings yet
- HooksDocument32 pagesHooksamadhubalan100% (1)
- Introduction To Space EnvironmentDocument250 pagesIntroduction To Space EnvironmentIKOROMILOS100% (1)
- Rbalance Rotor Balancing ProcedureDocument2 pagesRbalance Rotor Balancing ProcedureBradley NelsonNo ratings yet
- A Comparative Assessment of Stabilization Potential of Cement, Lime & GeopolymerDocument13 pagesA Comparative Assessment of Stabilization Potential of Cement, Lime & GeopolymeroNo ratings yet
- DSP - P4 Digital Images - A-D & D-ADocument9 pagesDSP - P4 Digital Images - A-D & D-AArmando CajahuaringaNo ratings yet
- Optisplice One Handheld Fusion Splicer: ApplicationsDocument6 pagesOptisplice One Handheld Fusion Splicer: ApplicationsAlan Abdiel RuizNo ratings yet
- Presentation Wind EnergyDocument23 pagesPresentation Wind EnergyLakshyaNo ratings yet
- Class Xii Physics SQPDocument125 pagesClass Xii Physics SQPbrutalrx3310No ratings yet
- Long Quiz Science 8Document2 pagesLong Quiz Science 8Diamond CrsktNo ratings yet
- Tutorial 2Document3 pagesTutorial 2SK TamilanNo ratings yet
- Lumion SettingDocument3 pagesLumion SettingPawlo MohikaNo ratings yet
- PSC1501 Assignment 4Document5 pagesPSC1501 Assignment 4Koketso MashangoaneNo ratings yet
- Hydraulic Seals-SKF PDFDocument0 pagesHydraulic Seals-SKF PDFSharath ThimmegowdaNo ratings yet