You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- SeriiDocument3 pagesSeriiTomi DimovskiNo ratings yet
- Topology ContinuiuDocument9 pagesTopology ContinuiuFernandoFierroGonzalezNo ratings yet
- Demidovic - Reseni Integrali - Zbirka ZadatakaDocument32 pagesDemidovic - Reseni Integrali - Zbirka ZadatakaDragan100% (2)
- Inner Products On N-Inner Product Spaces: January 2002Document11 pagesInner Products On N-Inner Product Spaces: January 2002Tomi DimovskiNo ratings yet
- AsimptotiDocument1 pageAsimptotiTomi DimovskiNo ratings yet
- 2015sol PDFDocument37 pages2015sol PDFKaitPadillaNo ratings yet
- 2015sol PDFDocument37 pages2015sol PDFKaitPadillaNo ratings yet
- Applied Mathematics Letters: Ayşe SönmezDocument4 pagesApplied Mathematics Letters: Ayşe SönmezTomi DimovskiNo ratings yet
- ABCsDocument12 pagesABCspicugaNo ratings yet
- Demidovic - Reseni Integrali - Zbirka ZadatakaDocument32 pagesDemidovic - Reseni Integrali - Zbirka ZadatakaDragan100% (2)
- Logging BailoutDocument1 pageLogging BailoutTomi DimovskiNo ratings yet
- Fixed Point in Quasi Semi 2 - Metric SpacesDocument16 pagesFixed Point in Quasi Semi 2 - Metric SpacesTomi DimovskiNo ratings yet
- Uniform ConvergenceDocument76 pagesUniform ConvergenceTomi DimovskiNo ratings yet
- Lal. Banachs Contraction Principle For 2-Metric SpaceDocument7 pagesLal. Banachs Contraction Principle For 2-Metric SpaceTomi DimovskiNo ratings yet
- Sharma. A Note On Fixed Points in 2-Metric SpacesDocument4 pagesSharma. A Note On Fixed Points in 2-Metric SpacesTomi DimovskiNo ratings yet
- Alt X PDFDocument0 pagesAlt X PDFTomi DimovskiNo ratings yet
- Some Fixed Point Theorems in Metric and 2-Metric Spaces: S. Venkata Ratnam NaiduDocument12 pagesSome Fixed Point Theorems in Metric and 2-Metric Spaces: S. Venkata Ratnam NaiduTomi DimovskiNo ratings yet
- Soochow Journal of Mathematics Volume 33, No. 4, Pp. 875-884, October 2007 - Weakly Compatible Maps in Generalized Menger-Pm-Spaces, KumarDocument10 pagesSoochow Journal of Mathematics Volume 33, No. 4, Pp. 875-884, October 2007 - Weakly Compatible Maps in Generalized Menger-Pm-Spaces, KumarTomi DimovskiNo ratings yet
- Fixed Point in Quasi Semi 2 - Metric SpacesDocument16 pagesFixed Point in Quasi Semi 2 - Metric SpacesTomi DimovskiNo ratings yet
- Common Fixed Point Theorems in A Complete 2-Metric SpaceDocument9 pagesCommon Fixed Point Theorems in A Complete 2-Metric SpaceTomi DimovskiNo ratings yet
- 1003 5744v3Document26 pages1003 5744v3Tomi DimovskiNo ratings yet
- The Journal of Nonlinear Science and Applications - Generalized Contractions and Common Fixed Point Theorems Concerning Tau-DistanceDocument9 pagesThe Journal of Nonlinear Science and Applications - Generalized Contractions and Common Fixed Point Theorems Concerning Tau-DistanceTomi DimovskiNo ratings yet
- 178Document20 pages178Tomi DimovskiNo ratings yet
- Notes On Fréchet Spaces: Woo Chorl HongDocument8 pagesNotes On Fréchet Spaces: Woo Chorl HongTomi DimovskiNo ratings yet
- Alt X PDFDocument0 pagesAlt X PDFTomi DimovskiNo ratings yet
- Notes On Fréchet Spaces: Woo Chorl HongDocument8 pagesNotes On Fréchet Spaces: Woo Chorl HongTomi DimovskiNo ratings yet
- Analele S Tiint Ifice Ale Universit AT Ii "Al.I.Cuza" Ias I Tomul XLIV, S.i.a, Matematic A, 1998, f1Document22 pagesAnalele S Tiint Ifice Ale Universit AT Ii "Al.I.Cuza" Ias I Tomul XLIV, S.i.a, Matematic A, 1998, f1Tomi DimovskiNo ratings yet
- 178Document20 pages178Tomi DimovskiNo ratings yet
- Convergence Rates in Weighted L Spaces of Kernel Density Estimators For Linear ProcessesDocument13 pagesConvergence Rates in Weighted L Spaces of Kernel Density Estimators For Linear ProcessesTomi DimovskiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- BYRGMv 3Document30 pagesBYRGMv 3tajsisNo ratings yet
- Solar Ifc ReportDocument40 pagesSolar Ifc ReportSIVA NAGA SUDHEER SIDDANINo ratings yet
- Week 4 and 5 Non-Verbal Communication: 4.1 The Importance of Nonverbal CommunicationDocument8 pagesWeek 4 and 5 Non-Verbal Communication: 4.1 The Importance of Nonverbal CommunicationNovilia FriskaNo ratings yet
- Scaffold 2Document3 pagesScaffold 2Mahmoud Elsayed MohamedNo ratings yet
- Wre MCQDocument136 pagesWre MCQsurendranath jadhavNo ratings yet
- Resume SanjuDocument3 pagesResume SanjuGouse ShaikNo ratings yet
- Proton-Halo Breakup DynamicsDocument7 pagesProton-Halo Breakup DynamicsBharat KashyapNo ratings yet
- Heat Transfer in Internal Combustion Engines: 85-WA/HT-23Document7 pagesHeat Transfer in Internal Combustion Engines: 85-WA/HT-23muhammad basitNo ratings yet
- Department of Education: Learning CompetencyDocument2 pagesDepartment of Education: Learning CompetencyShaira May Tangonan CaragNo ratings yet
- Afa 7&8Document11 pagesAfa 7&8APMNo ratings yet
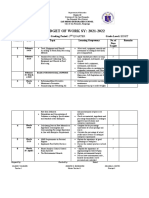
- BUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3Document2 pagesBUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3michelle dayritNo ratings yet
- 30 Tips For Indesign Users enDocument38 pages30 Tips For Indesign Users enMoo MNo ratings yet
- DSS+ SH Risk Management HandbookDocument20 pagesDSS+ SH Risk Management HandbookAlan PicazzoNo ratings yet
- Ancient AstronomyDocument26 pagesAncient AstronomyRodel RamosNo ratings yet
- IHS Markit Seed Market Analysis and Data InfographicDocument1 pageIHS Markit Seed Market Analysis and Data Infographictripurari pandeyNo ratings yet
- Soil PHDocument19 pagesSoil PHElly Paul Andres TomasNo ratings yet
- Session Nos. 26 - 31: Cities of Mandaluyong and PasigDocument25 pagesSession Nos. 26 - 31: Cities of Mandaluyong and PasigLego AlbertNo ratings yet
- Unit 5Document3 pagesUnit 5api-665951284No ratings yet
- WWW - Smccnasipit.edu - PH: Saint Michael College of CaragaDocument5 pagesWWW - Smccnasipit.edu - PH: Saint Michael College of CaragaDivine CompendioNo ratings yet
- Design Manual Is-800 Chapter 5Document92 pagesDesign Manual Is-800 Chapter 5Vivek Kumar GopeNo ratings yet
- English 900 - 01Document147 pagesEnglish 900 - 01Hnin Hnin AungNo ratings yet
- Basic Science AssigDocument5 pagesBasic Science AssigdomromeoNo ratings yet
- Line Scan (Switch Hook) : NamesDocument3 pagesLine Scan (Switch Hook) : NamesUsairumNo ratings yet
- Thermodynamics JAM 2021 1Document42 pagesThermodynamics JAM 2021 1krishna prasad ghanta100% (2)
- Rosela Rowell, Carlos Rodriguez, Mark Salpeter, Chet Michals, Sarah KiddDocument5 pagesRosela Rowell, Carlos Rodriguez, Mark Salpeter, Chet Michals, Sarah KiddRosela De Jesus RowellNo ratings yet
- StringDocument4 pagesStringAadyant BhadauriaNo ratings yet
- Astm D2777 Determinacion de La Precision y El Sesgo PDFDocument21 pagesAstm D2777 Determinacion de La Precision y El Sesgo PDFAlvaro Pérez PérezNo ratings yet
- Franz Wagner & Sohn GMBH: U-Tube Manometer D 116 FDocument1 pageFranz Wagner & Sohn GMBH: U-Tube Manometer D 116 Fdickliu dickliuNo ratings yet
- Weekly Home Learning Plan (Q3) Self-Learning Module 4 (Week 5)Document2 pagesWeekly Home Learning Plan (Q3) Self-Learning Module 4 (Week 5)Richie MacasarteNo ratings yet
- Marine Ecosystem Restoration and Biodiversity OffsetDocument10 pagesMarine Ecosystem Restoration and Biodiversity OffsetMiriam TorresNo ratings yet