You might also like
- SmoothK40 Guide - Smoothie ProjectDocument1 pageSmoothK40 Guide - Smoothie ProjectJhwazkdNo ratings yet
- Printer CFGDocument17 pagesPrinter CFGFiras Al-KanaaniNo ratings yet
- Robin ConfigDocument6 pagesRobin ConfigMustafa CelebiNo ratings yet
- Robin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidDocument7 pagesRobin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidMarc AlamoNo ratings yet
- Robin Nano35 CFGDocument7 pagesRobin Nano35 CFGSebas CarnigliaNo ratings yet
- Appendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1Document3 pagesAppendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1gonzalesNo ratings yet
- Robin Nano CFGDocument5 pagesRobin Nano CFGMarc AlamoNo ratings yet
- Examples of All Dynagen Network File OptionsDocument7 pagesExamples of All Dynagen Network File Optionsأحمد مروانNo ratings yet
- SFS V2.0 User Manual 20230210Document6 pagesSFS V2.0 User Manual 20230210Alex ValtierraNo ratings yet
- Mapa GRBL 1 1 HDocument6 pagesMapa GRBL 1 1 HMarcel PiersonNo ratings yet
- DM500 Motion Controller User ManualDocument43 pagesDM500 Motion Controller User Manualrecha andy kNo ratings yet
- UntitledDocument5 pagesUntitledAntonio Martínez LozanoNo ratings yet
- How To Control Speed of Stepper Motor by PotentiometerDocument5 pagesHow To Control Speed of Stepper Motor by PotentiometerMihai Bogdan100% (1)
- Post Mastercam 4 AxisDocument62 pagesPost Mastercam 4 AxisGiacongcokhi CokhihotroNo ratings yet
- Sipro SIAX 51 Manual 2022101113818Document16 pagesSipro SIAX 51 Manual 2022101113818carl.daviesNo ratings yet
- Controlling NEMA 17 Stepper Motor With Arduino and A4988 Stepper Driver ModuleDocument15 pagesControlling NEMA 17 Stepper Motor With Arduino and A4988 Stepper Driver Modulesanjib raiNo ratings yet
- Generic Siemens828d 3X MillDocument39 pagesGeneric Siemens828d 3X MillSiva kumarNo ratings yet
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- Goertzel Algorithm DTMF Detection - HobbydebrajDocument18 pagesGoertzel Algorithm DTMF Detection - HobbydebrajRachel RowlandNo ratings yet
- Arduino - AttachInterruptDocument5 pagesArduino - AttachInterruptmicha2mcNo ratings yet
- How To Setup GRBL & Control CNC Machine With ArduinoDocument19 pagesHow To Setup GRBL & Control CNC Machine With ArduinoYasir Yasir KovanNo ratings yet
- How To Program A 3D Printer With Marlin and ArduinDocument8 pagesHow To Program A 3D Printer With Marlin and ArduinawwabfaizNo ratings yet
- Wifi ConfigDocument99 pagesWifi ConfigmfpljhangNo ratings yet
- Sketch Due Motori Ir Sensor InoDocument3 pagesSketch Due Motori Ir Sensor InoscacchiNo ratings yet
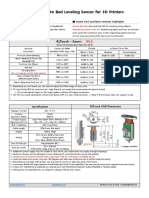
- Bltouch: Auto Bed Leveling Sensor For 3D PrintersDocument4 pagesBltouch: Auto Bed Leveling Sensor For 3D Printersedy gpsmntc2No ratings yet
- Bltouch: Auto Bed Leveling Sensor For 3D PrintersDocument4 pagesBltouch: Auto Bed Leveling Sensor For 3D PrintersAsepNo ratings yet
- Marlin User Guide: Author Date Document VersionDocument7 pagesMarlin User Guide: Author Date Document VersionLia M100% (1)
- Cnc-210S User Manual VER.F668-R15: DOC NO:001229Document23 pagesCnc-210S User Manual VER.F668-R15: DOC NO:001229CarlosNo ratings yet
- Bildr Use The Easydriver Stepper Motor Driver..Document5 pagesBildr Use The Easydriver Stepper Motor Driver..fayazrashNo ratings yet
- Specification of Dyn2-Series AC Servo SystemDocument29 pagesSpecification of Dyn2-Series AC Servo SystemPham LongNo ratings yet
- Cncvietpro DDCS V3.1Document44 pagesCncvietpro DDCS V3.1Anderson Azevedo TorresNo ratings yet
- Gps ConfDocument4 pagesGps ConfDániel TóthNo ratings yet
- Application Guide For Pulse and Direction Stepper SystemsDocument14 pagesApplication Guide For Pulse and Direction Stepper Systemsfog900No ratings yet
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDocument13 pagesKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67No ratings yet
- How Subprograms Work: Subprograms in Mastercam Mill and LatheDocument16 pagesHow Subprograms Work: Subprograms in Mastercam Mill and LatheHoang LamNo ratings yet
- Repieter FrimwareDocument1 pageRepieter FrimwareWillian CarlosNo ratings yet
- Settingtypes Type2Document43 pagesSettingtypes Type2Izan LópezNo ratings yet
- WCNSS Qcom CFG - IniDocument11 pagesWCNSS Qcom CFG - IniRoberto Carlos GarciaNo ratings yet
- Standalone Motion Controller DDCS V3.1 User's Guide: Shenzhen Digital Dream Numerical Technology Co., LTDDocument44 pagesStandalone Motion Controller DDCS V3.1 User's Guide: Shenzhen Digital Dream Numerical Technology Co., LTDFarhan Ashraf AliNo ratings yet
- Parametros Motor RuidaDocument4 pagesParametros Motor RuidatallerdystecaNo ratings yet
- Magnitude Estimator - DspguruDocument5 pagesMagnitude Estimator - DspguruBui Van ThanhNo ratings yet
- Smart Stepper ManualDocument24 pagesSmart Stepper ManualasdfNo ratings yet
- GRBL Software InstructionsDocument30 pagesGRBL Software InstructionsNgoc Nguyên100% (1)
- New TOPCNC TC55V Instruction ManualDocument14 pagesNew TOPCNC TC55V Instruction ManualCarlos SerranoNo ratings yet
- TOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia JiaDocument13 pagesTOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia Jiaanhthong3kNo ratings yet
- 3DTouch Auto Leveling Sensor User ManualDocument26 pages3DTouch Auto Leveling Sensor User Manualc0d3rNo ratings yet
- Figure 1.1 4 DOF RobotDocument15 pagesFigure 1.1 4 DOF RobotPhong NguyenNo ratings yet
- LaserWeb4 K40 Setup Guide and FAQDocument4 pagesLaserWeb4 K40 Setup Guide and FAQGrover Concha ZavaletaNo ratings yet
- Cccam 2.2.1 CFGDocument13 pagesCccam 2.2.1 CFGerevus10% (1)
- Mach3 Tutorial: Setting Up A Basic Three Axis Milling MachineDocument14 pagesMach3 Tutorial: Setting Up A Basic Three Axis Milling Machinezealous100% (4)
- Mach3 Setup TutorialDocument14 pagesMach3 Setup TutorialFederico Santinelli100% (1)
- Digital Modulations using MatlabFrom EverandDigital Modulations using MatlabRating: 4 out of 5 stars4/5 (6)
- Cisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3From EverandCisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3No ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- The Fujifilm X-T2: 120 X-Pert Tips to Get the Most Out of Your CameraFrom EverandThe Fujifilm X-T2: 120 X-Pert Tips to Get the Most Out of Your CameraNo ratings yet
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- DS-012 Pixhawk Autopilot v6X StandardDocument11 pagesDS-012 Pixhawk Autopilot v6X StandardReno MurdaNo ratings yet
- DS-012 Pixhawk Autopilot v6X StandardDocument11 pagesDS-012 Pixhawk Autopilot v6X StandardReno MurdaNo ratings yet
- DS-009 Pixhawk Connector StandardDocument12 pagesDS-009 Pixhawk Connector Standardali almorsedNo ratings yet
- DS-016 Pixhawk Autopilot V6u StandardDocument12 pagesDS-016 Pixhawk Autopilot V6u Standardali almorsedNo ratings yet
- DC ProbeDocument2 pagesDC Probeali almorsedNo ratings yet
- DS-016 Pixhawk Autopilot V6u StandardDocument12 pagesDS-016 Pixhawk Autopilot V6u Standardali almorsedNo ratings yet
- ConfigDocument4 pagesConfigali almorsedNo ratings yet
- Component Pick and Place Scheduling For Surface Mount Device Placement MachineDocument14 pagesComponent Pick and Place Scheduling For Surface Mount Device Placement Machineali almorsedNo ratings yet
- 3.3V - 5V USB Bridge SU109-TTL V1.0Document3 pages3.3V - 5V USB Bridge SU109-TTL V1.0ali almorsedNo ratings yet
- SMT ReportDocument28 pagesSMT ReportAyesha Siddiqua100% (1)
- Single Axis Text I J Mic 08075 FinalDocument26 pagesSingle Axis Text I J Mic 08075 Finalali almorsedNo ratings yet
- 30 S Zivanovic Et AlDocument9 pages30 S Zivanovic Et Alali almorsedNo ratings yet
- Before You Start: Required ToolsDocument28 pagesBefore You Start: Required Toolsali almorsedNo ratings yet
- Component Pick and Place Scheduling For Surface Mount Device Placement MachineDocument14 pagesComponent Pick and Place Scheduling For Surface Mount Device Placement Machineali almorsedNo ratings yet
- 3.3V - 5V USB Bridge SU109-TTL V1.0Document3 pages3.3V - 5V USB Bridge SU109-TTL V1.0ali almorsedNo ratings yet
- Single Axis Text I J Mic 08075 FinalDocument26 pagesSingle Axis Text I J Mic 08075 Finalali almorsedNo ratings yet
- 4.4.1.2 - Configure Ip Acls To Mitigate Attacks: TopologyDocument85 pages4.4.1.2 - Configure Ip Acls To Mitigate Attacks: TopologyCamylytho GonzalezNo ratings yet
- Invasion Map of Potosi - Post Modern VandalDocument1 pageInvasion Map of Potosi - Post Modern Vandalmadeleine.bengoleaNo ratings yet
- Identity Proofing: FAQ'sDocument4 pagesIdentity Proofing: FAQ'ssaidkgNo ratings yet
- Blood Count TrackerDocument8 pagesBlood Count TrackerSrinivasan .DNo ratings yet
- 2CC 3CC Not Working 0421Document13 pages2CC 3CC Not Working 0421juan carlos LPNo ratings yet
- Items of Cadastral Computations in The Pblis of KCSC: Prof. Byung-Guk KIM, Kwang-Seok KWON and Donghoon JEONG, KoreaDocument11 pagesItems of Cadastral Computations in The Pblis of KCSC: Prof. Byung-Guk KIM, Kwang-Seok KWON and Donghoon JEONG, KoreaAlex NkurunzizaNo ratings yet
- Control-M CM For DataStage CookbookDocument5 pagesControl-M CM For DataStage CookbookHulya SahipNo ratings yet
- IOQM 2022 Practice Test-05Document2 pagesIOQM 2022 Practice Test-05AkashNo ratings yet
- A Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchDocument7 pagesA Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchMarcoLuisDoradoPinedaNo ratings yet
- Folleto Del Equipo HeliosDocument6 pagesFolleto Del Equipo HeliosJose Luis Albornoz HermosillaNo ratings yet
- Why Measuring Security Is Hard ?Document14 pagesWhy Measuring Security Is Hard ?Catucci VivereNo ratings yet
- Basic Course in Biomedical Research Dr. Manickam Ponnaiah ICMR-National Institute of Epidemiology, Chennai Lecture - 17 Data ManagementDocument15 pagesBasic Course in Biomedical Research Dr. Manickam Ponnaiah ICMR-National Institute of Epidemiology, Chennai Lecture - 17 Data ManagementGksNo ratings yet
- A 266 Erpsap Ivt PDFDocument25 pagesA 266 Erpsap Ivt PDFlastrajNo ratings yet
- Release Notes 19.3Document43 pagesRelease Notes 19.3atilaNo ratings yet
- Lec 01Document31 pagesLec 01indrahermawanNo ratings yet
- SpaceClaim - Developers Guide-5-6Document2 pagesSpaceClaim - Developers Guide-5-6Alexgh1993No ratings yet
- DST 4601 Technical ManualDocument103 pagesDST 4601 Technical ManualPetar Markov100% (2)
- Cheat Sheet - Gnuplot2Document1 pageCheat Sheet - Gnuplot2Ambar ShuklaNo ratings yet
- MSP430F673x, MSP430F672x Mixed-Signal Microcontrollers: 1 Device OverviewDocument146 pagesMSP430F673x, MSP430F672x Mixed-Signal Microcontrollers: 1 Device Overviewercan akalanNo ratings yet
- It Modernization Project: Corrected Upto 31/10/2020Document12 pagesIt Modernization Project: Corrected Upto 31/10/2020Palakala NagarjunaNo ratings yet
- FYP-3 Report Template For Development ProjectsDocument55 pagesFYP-3 Report Template For Development ProjectsSamreen TabbasamNo ratings yet
- Technology PresentationDocument21 pagesTechnology Presentationapi-549499713No ratings yet
- Java Lab Answer 5Document8 pagesJava Lab Answer 5adithkumar menonNo ratings yet
- Report of ONGDocument17 pagesReport of ONGMyrene Justine Cabig TicticNo ratings yet
- Data Sheet: FeaturesDocument8 pagesData Sheet: FeatureschristianNo ratings yet
- Csp0506 - Python Programming UpdatedDocument9 pagesCsp0506 - Python Programming UpdatedMahesh KushwahNo ratings yet
- Cybersecurity in Africa An AssessmentDocument34 pagesCybersecurity in Africa An AssessmentTPK Studies & WorkNo ratings yet
- Instructions: - F5400D Series - F5400DP Series - F6400D Series - F6400DP SeriesDocument2 pagesInstructions: - F5400D Series - F5400DP Series - F6400D Series - F6400DP SeriesMikeNo ratings yet
- Las q1 w3 Empo Tech TorrefielDocument23 pagesLas q1 w3 Empo Tech TorrefielRubenNo ratings yet
- Macrium Reflect Patch LogDocument5 pagesMacrium Reflect Patch LogShital PatelNo ratings yet