You might also like
- 118 4417584 D09 Configuration Manual CIU888Document198 pages118 4417584 D09 Configuration Manual CIU888Thái NgọcNo ratings yet
- 3500/25 SIL Enhanced Keyphasor ModuleDocument27 pages3500/25 SIL Enhanced Keyphasor ModuleRabah AmidiNo ratings yet
- 2.2.1 - SIS - Design, Analysis and Justification (EC50) - ISADocument2 pages2.2.1 - SIS - Design, Analysis and Justification (EC50) - ISARoberto CarrascoNo ratings yet
- Ifix Migration GuideDocument44 pagesIfix Migration GuideMoses TanNo ratings yet
- Treon Introduction - Industrial NodeDocument11 pagesTreon Introduction - Industrial NodeAibek AltynbekNo ratings yet
- HIMA ELOP - II - FirstStepsDocument134 pagesHIMA ELOP - II - FirstStepsUmer BhattiNo ratings yet
- ProductSpec Triconex Tricon 4351BDocument36 pagesProductSpec Triconex Tricon 4351BARTURNo ratings yet
- Experion Serie C SpecsDocument25 pagesExperion Serie C SpecsalexdelarosaU12100% (1)
- VITO 762 Installation GuideDocument36 pagesVITO 762 Installation GuideThái Ngọc0% (1)
- VITO 762 Installation GuideDocument36 pagesVITO 762 Installation GuideThái Ngọc0% (1)
- FK Safety Manual EDocument20 pagesFK Safety Manual EAnonymous br3oqHThoNo ratings yet
- 3500 Galvanic Isolator Interface: ManualDocument36 pages3500 Galvanic Isolator Interface: ManualTheerayootNo ratings yet
- Function Block To Control Mm4 Via Profibus DP Docu v3 2 enDocument12 pagesFunction Block To Control Mm4 Via Profibus DP Docu v3 2 enxisamNo ratings yet
- Control FireDocument34 pagesControl FireJorge RodríguezNo ratings yet
- GTR 210Document64 pagesGTR 210Zaki nouiNo ratings yet
- Product Manual 26518V3 (Revision C) : Micronet TMR 5009Ft Fault-Tolerant Steam Turbine ControlDocument240 pagesProduct Manual 26518V3 (Revision C) : Micronet TMR 5009Ft Fault-Tolerant Steam Turbine Controlkazmi81No ratings yet
- Experion LCN Tech Spec PDFDocument27 pagesExperion LCN Tech Spec PDFjashkishoreNo ratings yet
- 3500/72M Recip Rod Position Monitor: Operation and Maintenance ManualDocument158 pages3500/72M Recip Rod Position Monitor: Operation and Maintenance ManualNOEMINo ratings yet
- 3500/44 Aeroderivative GT Vibration Monitor: Operation and Maintenance ManualDocument87 pages3500/44 Aeroderivative GT Vibration Monitor: Operation and Maintenance ManualDenis JimenezNo ratings yet
- Swylite LST200 Instruction SheetDocument2 pagesSwylite LST200 Instruction Sheetgreen8019No ratings yet
- Sil Proof Test Practices - 2Document1 pageSil Proof Test Practices - 2renvNo ratings yet
- Interface For RS3 IODocument48 pagesInterface For RS3 IOSaad BroNo ratings yet
- 1 Technical Product Guide Trident v2 SystemsDocument58 pages1 Technical Product Guide Trident v2 Systemsmorales_francisco21No ratings yet
- SIS - Safety Instrumented Systems - A Practical ViewDocument4 pagesSIS - Safety Instrumented Systems - A Practical ViewMugesh KannaNo ratings yet
- TTD Series Configurable Fault Annunciator: Installation and Operations ManualDocument56 pagesTTD Series Configurable Fault Annunciator: Installation and Operations ManualWg CarreñoNo ratings yet
- Communication Architecture of The IEC 61850-Based Micro Grid SystemsDocument8 pagesCommunication Architecture of The IEC 61850-Based Micro Grid Systemssevero97No ratings yet
- 2PAA109967-514 D en System 800xa 5.1 RevE Feature Pack 4 Release NotesDocument268 pages2PAA109967-514 D en System 800xa 5.1 RevE Feature Pack 4 Release NotesRubelinho PomaNo ratings yet
- ValveLink VL2000Document176 pagesValveLink VL2000hrtoro100% (1)
- Sapag PDFDocument4 pagesSapag PDFMargaret Daugherty100% (1)
- Partial Stroke Test With S7-400FH and PCS 7: Function DescriptionDocument93 pagesPartial Stroke Test With S7-400FH and PCS 7: Function DescriptionRaul Santos HernandezNo ratings yet
- MODBUS-RTU Protocol GuideDocument27 pagesMODBUS-RTU Protocol GuidePau Andrea CNo ratings yet
- Fmeda1 - Exida PaperDocument7 pagesFmeda1 - Exida PapervijayigcarNo ratings yet
- ICS Triplex-8000 SeriesDocument33 pagesICS Triplex-8000 SeriesSteve Carvalho100% (1)
- 9720081-010 Triconex SOE Recorder Users Guide 4.5.0Document130 pages9720081-010 Triconex SOE Recorder Users Guide 4.5.0jorisanNo ratings yet
- Selection GuideDocument65 pagesSelection GuideAdnan HayatNo ratings yet
- Installation GuideDocument25 pagesInstallation Guidechergui.adelNo ratings yet
- Technical Application Note 048Document11 pagesTechnical Application Note 048Demetri M. Scythe100% (1)
- 2.2.2 - SIS - Design, Analysis, and Justification (EC50E - Online Version) - ISADocument3 pages2.2.2 - SIS - Design, Analysis, and Justification (EC50E - Online Version) - ISARoberto Carrasco0% (1)
- 02-Safeethernet 12 e FDocument67 pages02-Safeethernet 12 e FDario FaoroNo ratings yet
- FBN04227 Fieldbus FDS SampleDocument25 pagesFBN04227 Fieldbus FDS SampleJorge Pérez FrisanchoNo ratings yet
- Orbit 60 Series System Datasheet 137M5182 PDFDocument35 pagesOrbit 60 Series System Datasheet 137M5182 PDFJuan Antonio MarinNo ratings yet
- GEH-6839 Mark VIe Control Systems Secure Deployment GuideDocument2 pagesGEH-6839 Mark VIe Control Systems Secure Deployment Guideeaston zhang100% (1)
- PCS 7 Process Visualization on Mobile DevicesDocument40 pagesPCS 7 Process Visualization on Mobile DevicesRafael DavidNo ratings yet
- Delta Vs Is Install GuideDocument68 pagesDelta Vs Is Install Guidedaniel_afpNo ratings yet
- 129772-01 Rev C 3500 40 Proximitor Monitor Module Operation and Maintenance ManualDocument154 pages129772-01 Rev C 3500 40 Proximitor Monitor Module Operation and Maintenance ManualEmadAlhosien Alhosien100% (1)
- Advanced Continuous HistorianDocument7 pagesAdvanced Continuous HistorianisraelalmaguerNo ratings yet
- Trident Technical Product Guide 2011 PDFDocument58 pagesTrident Technical Product Guide 2011 PDFFred Dibnah100% (1)
- Cimplicity SecureDeploymentGuide v2 PDFDocument70 pagesCimplicity SecureDeploymentGuide v2 PDFMOHAMMADNo ratings yet
- Valve Link PDFDocument16 pagesValve Link PDFhrtoroNo ratings yet
- 3BNP004865-511 - en System 800xa Safety 5.1 AC 800M High Integrity Safety ManualDocument174 pages3BNP004865-511 - en System 800xa Safety 5.1 AC 800M High Integrity Safety ManualM-E-D-Scribd0% (1)
- DeltaV SISnet RepeaterDocument6 pagesDeltaV SISnet RepeaterThai Nguyen QuocNo ratings yet
- Applying A Single Rosemount 5900S 2-In-1 Radar Level Gauge As The Sensor in Two Independent Protection Layers (I.e. BPCS and Sis)Document48 pagesApplying A Single Rosemount 5900S 2-In-1 Radar Level Gauge As The Sensor in Two Independent Protection Layers (I.e. BPCS and Sis)iptusNo ratings yet
- Emerson - Best Practices in SIS DocumentationDocument18 pagesEmerson - Best Practices in SIS DocumentationLuc SchramNo ratings yet
- 02 - BMS DEMO Help File Siemens PDFDocument11 pages02 - BMS DEMO Help File Siemens PDFSTABNo ratings yet
- WW HMI SCADA-04 Discover The New Situational Awareness Library in InTouch 2014Document45 pagesWW HMI SCADA-04 Discover The New Situational Awareness Library in InTouch 2014steam100deg8229No ratings yet
- 13849-1 AVENTICS Machine Safety PDFDocument59 pages13849-1 AVENTICS Machine Safety PDFpedro paivaNo ratings yet
- F7126e HIMA HIQuad h41 h51Document2 pagesF7126e HIMA HIQuad h41 h51AkoKhalediNo ratings yet
- 12P5403GDocument16 pages12P5403GMalik HamzaNo ratings yet
- Srd960 Srd991 Sil enDocument16 pagesSrd960 Srd991 Sil enryg1360No ratings yet
- Namur Standard Sensors ExplainedDocument2 pagesNamur Standard Sensors ExplainedSaqueib Khan100% (1)
- Fisher Fieldvue Dvc6200F Digital Valve Controller PST Calibration and Testing Using Valvelink SoftwareDocument24 pagesFisher Fieldvue Dvc6200F Digital Valve Controller PST Calibration and Testing Using Valvelink SoftwareKram Alim VillonNo ratings yet
- Wago Perspecto 762: ManualDocument50 pagesWago Perspecto 762: ManualQuadroNo ratings yet
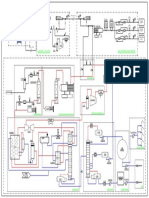
- PFDDocument11 pagesPFDThái NgọcNo ratings yet
- Marked P&ID - Drying Out - Line UpDocument22 pagesMarked P&ID - Drying Out - Line UpThái NgọcNo ratings yet
- Ban Ve P&ID 06.10.2017 - TUAN KHANH 22-4-2020Document68 pagesBan Ve P&ID 06.10.2017 - TUAN KHANH 22-4-2020Thái NgọcNo ratings yet
- Gateway Ciu 888: Enraf Tank FarmDocument8 pagesGateway Ciu 888: Enraf Tank FarmThái NgọcNo ratings yet
- With Honeywell Gauging Solutions: Rejuvenate Your TankDocument3 pagesWith Honeywell Gauging Solutions: Rejuvenate Your TankThái NgọcNo ratings yet
- Instruction Manual Vito Interface and Average Temperature (And Water) Probes For 854 Servo, 97X Smartradar and 877 FdiDocument52 pagesInstruction Manual Vito Interface and Average Temperature (And Water) Probes For 854 Servo, 97X Smartradar and 877 FdiarefNo ratings yet
- PFD He Thong PM3Document1 pagePFD He Thong PM3Thái NgọcNo ratings yet
- 118 4417590 D13 Installation Guide (Spare Part List)Document37 pages118 4417590 D13 Installation Guide (Spare Part List)Thái NgọcNo ratings yet
- Instruction Manual XPU-2 Option RS-232C / RS-485Document12 pagesInstruction Manual XPU-2 Option RS-232C / RS-485Thái NgọcNo ratings yet
- 118 4417588 D13 Protocol Manual Modbus HostDocument188 pages118 4417588 D13 Protocol Manual Modbus HostThái NgọcNo ratings yet
- HCU option board installation guideDocument16 pagesHCU option board installation guideThái NgọcNo ratings yet
- Installation Manual VITO IP Upgrade Kit: August 2013 Part No. 4416656 Rev. 2Document16 pagesInstallation Manual VITO IP Upgrade Kit: August 2013 Part No. 4416656 Rev. 2Thái NgọcNo ratings yet
- Instruction Manual SPU II Hard Alarm Output Contacts: July 2009 Part No. 4416.223 Revision.1Document12 pagesInstruction Manual SPU II Hard Alarm Output Contacts: July 2009 Part No. 4416.223 Revision.1SATISHNo ratings yet
- Vito 762 DS PDFDocument6 pagesVito 762 DS PDFمحمد رمضانNo ratings yet
- Atg854 p3 Htms OptionDocument56 pagesAtg854 p3 Htms OptionThái NgọcNo ratings yet
- ATG854 Protocol ManualDocument24 pagesATG854 Protocol ManualThái NgọcNo ratings yet
- Vito 762 DS PDFDocument6 pagesVito 762 DS PDFمحمد رمضانNo ratings yet
- Instruction Manual Vito Interface and Average Temperature (And Water) Probes For 854 Servo, 97X Smartradar and 877 FdiDocument52 pagesInstruction Manual Vito Interface and Average Temperature (And Water) Probes For 854 Servo, 97X Smartradar and 877 FdiarefNo ratings yet
- Instruction Manual 977 Tank Side IndicatorDocument28 pagesInstruction Manual 977 Tank Side IndicatorThái NgọcNo ratings yet
- ATG854 Item Document For Honeywell Endarf Series 854 Level GaugeDocument88 pagesATG854 Item Document For Honeywell Endarf Series 854 Level GaugeThái NgọcNo ratings yet
- Instruction Manual Vito Interface and Average Temperature (And Water) Probes For 854 Servo, 97X Smartradar and 877 FdiDocument52 pagesInstruction Manual Vito Interface and Average Temperature (And Water) Probes For 854 Servo, 97X Smartradar and 877 FdiarefNo ratings yet
- ATG854 Protocol ManualDocument24 pagesATG854 Protocol ManualThái NgọcNo ratings yet
- ATG854 Protocol ManualDocument24 pagesATG854 Protocol ManualThái NgọcNo ratings yet
- VITO LT Selction GuideDocument6 pagesVITO LT Selction GuideThái NgọcNo ratings yet
- 118 4416220 Rev08Document68 pages118 4416220 Rev08Luiz BispoNo ratings yet
- Installation Guide 854 Advanced Technology Gauge: June 2010 Part No. 4416.225 Revision 7Document24 pagesInstallation Guide 854 Advanced Technology Gauge: June 2010 Part No. 4416.225 Revision 7Thái NgọcNo ratings yet
- Atg854 p3 Htms OptionDocument56 pagesAtg854 p3 Htms OptionThái NgọcNo ratings yet
- Part 04 SET (31-34)Document5 pagesPart 04 SET (31-34)Amit AgrawalNo ratings yet
- Anelli Catalogo REV-2Document12 pagesAnelli Catalogo REV-2AL_B_RTONo ratings yet
- Edc Old PapersDocument36 pagesEdc Old PapersbhagyasrikagithaNo ratings yet
- PitotDocument120 pagesPitotIqnasius MandagiNo ratings yet
- Gas Power CycleDocument49 pagesGas Power CycleNafisa AnikaNo ratings yet
- Fuel Oil System Design and CalculationDocument21 pagesFuel Oil System Design and CalculationSean Chen GyarinoNo ratings yet
- 4.0 Thermal PhysicsDocument38 pages4.0 Thermal Physicsmuhd hafizzudinNo ratings yet
- Sample For Solution Manual Quantum Mechanics 6th Editio by Alastair Rae & Jim NapolitanoDocument10 pagesSample For Solution Manual Quantum Mechanics 6th Editio by Alastair Rae & Jim Napolitanomina starNo ratings yet
- Van de Graaff GeneratorDocument7 pagesVan de Graaff GeneratorKrissh RajNo ratings yet
- 15 FCI Examen SpanishDocument18 pages15 FCI Examen SpanishCésar DiazNo ratings yet
- Service Guide SW-HF5.1 3000Document18 pagesService Guide SW-HF5.1 3000Nicu LiviuNo ratings yet
- Canadian Refrigeration & Air Conditioning Mechanic Practice Manual (Diagrams, Questions & Answers)Document73 pagesCanadian Refrigeration & Air Conditioning Mechanic Practice Manual (Diagrams, Questions & Answers)Victor Kavhendekete, MTechMgt, BTech100% (2)
- Physics SL P1 MsDocument18 pagesPhysics SL P1 MsWojtek BłażejNo ratings yet
- AC Fundamentals Introduction TheoryDocument25 pagesAC Fundamentals Introduction TheoryAlex ZulNo ratings yet
- Pleo Battery Pack Instructions PDFDocument4 pagesPleo Battery Pack Instructions PDFSofia EvaNo ratings yet
- Katalog Mitsubishi ElectricDocument8 pagesKatalog Mitsubishi ElectricRian HeriawanNo ratings yet
- OCR Advanced GCE Physics A - 2826/01 - Unifying Concepts in Physics - January 2007Document12 pagesOCR Advanced GCE Physics A - 2826/01 - Unifying Concepts in Physics - January 2007Soham PatwardhanNo ratings yet
- Heat Transfer Enhancement by Modification in Hexagon TubeDocument8 pagesHeat Transfer Enhancement by Modification in Hexagon TubeIJRASETPublicationsNo ratings yet
- (E) Chapter 4 - TransformerDocument24 pages(E) Chapter 4 - TransformerKamaruz DanialNo ratings yet
- TV Sylvania Mod. 6477ffDocument53 pagesTV Sylvania Mod. 6477ffpata saladaNo ratings yet
- Datasheet N 828 01-2019 WebDocument5 pagesDatasheet N 828 01-2019 Web易行胜No ratings yet
- Source/Grid Data: 0 % CalcDocument6 pagesSource/Grid Data: 0 % CalcAlla Naveen KumarNo ratings yet
- Dehumidification During Coating Operations: Art Pedroza, JR., James D. Graham, and Richard W. DriskoDocument6 pagesDehumidification During Coating Operations: Art Pedroza, JR., James D. Graham, and Richard W. DriskoNgô Trung NghĩaNo ratings yet
- Solidworks Report of Light PoleDocument12 pagesSolidworks Report of Light PoleThahir ShahNo ratings yet
- Powerware 9125 User Guide PDFDocument0 pagesPowerware 9125 User Guide PDFAkibo Tunde Williamson DaviesNo ratings yet
- 3021/3023 Buckpuck: Product OverviewDocument9 pages3021/3023 Buckpuck: Product OverviewmanualesgratisNo ratings yet
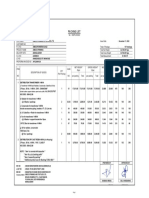
- Packing List for Simco Spinning & Textiles LtdDocument1 pagePacking List for Simco Spinning & Textiles LtdRivan rNo ratings yet
- Solar Module German Brand AE MD-530W-550W-144Document2 pagesSolar Module German Brand AE MD-530W-550W-144Theofilus JusniNo ratings yet
- Advanced Monolithic Systems: Rohs CompliantDocument9 pagesAdvanced Monolithic Systems: Rohs CompliantAle BugarínNo ratings yet