You might also like
- TM 5-2430-200-10Document196 pagesTM 5-2430-200-10Advocate100% (1)
- Unit 1 AP Classroom PDFDocument9 pagesUnit 1 AP Classroom PDFSara AbdelazizNo ratings yet
- How To Draw Manga - Vegeta (Dragon Ball Z)Document7 pagesHow To Draw Manga - Vegeta (Dragon Ball Z)Constantino Paucar Vega100% (1)
- SQL Cheat Sheet For Data Scientists by Tomi Mester 2019 PDFDocument12 pagesSQL Cheat Sheet For Data Scientists by Tomi Mester 2019 PDFVishal Shah100% (1)
- An Overview of The Ansi Z359 Fall Protection Code: FEBRUARY 16, 2018Document24 pagesAn Overview of The Ansi Z359 Fall Protection Code: FEBRUARY 16, 2018isabel Cristina Agresott TorresNo ratings yet
- Sandvik 2RE69 Stainless Steel DatasheetDocument9 pagesSandvik 2RE69 Stainless Steel DatasheetMuzammilNo ratings yet
- Production of AcrylonitrileDocument91 pagesProduction of Acrylonitrilegautham14360% (5)
- MOS-Construction of 132kv OHTL From Ad Darb To Looping PointDocument27 pagesMOS-Construction of 132kv OHTL From Ad Darb To Looping PointEngr Muhammad Azam ThaheemNo ratings yet
- Accounting Management SystemDocument64 pagesAccounting Management Systemnilesh50% (2)
- cs229 Notes EnsembleDocument7 pagescs229 Notes EnsemblebobNo ratings yet
- STSMDocument278 pagesSTSMMiguel Ruiz TatajeNo ratings yet
- Electrical network management with MV substation control and Modbus communicationDocument45 pagesElectrical network management with MV substation control and Modbus communicationMaximiliano SanchezNo ratings yet
- Functional Analysis Exam: N N + N NDocument3 pagesFunctional Analysis Exam: N N + N NLLászlóTóthNo ratings yet
- Ch3 PDFDocument55 pagesCh3 PDFphantom29No ratings yet
- Unbounded ReviewDocument7 pagesUnbounded ReviewGerman ChiappeNo ratings yet
- Topic18 Relations Among Four Fourier RepresentationsDocument10 pagesTopic18 Relations Among Four Fourier RepresentationsManikanta KrishnamurthyNo ratings yet
- Lec13 PDFDocument7 pagesLec13 PDFanilNo ratings yet
- Classes of Operators On Hilbert Spaces Extended Lecture NotesDocument24 pagesClasses of Operators On Hilbert Spaces Extended Lecture Notestalha azanNo ratings yet
- Slides 1Document20 pagesSlides 1siNo ratings yet
- Quasi Maximum Likelihood Theory - Lecture NotesDocument119 pagesQuasi Maximum Likelihood Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Discrete Hilbert TransformDocument6 pagesDiscrete Hilbert TransformGustavoSouzaNo ratings yet
- CTFT DTFT BonusDocument9 pagesCTFT DTFT BonusAmreshAmanNo ratings yet
- LBSEconometricsPartIIpdf Time SeriesDocument246 pagesLBSEconometricsPartIIpdf Time SeriesZoloft Zithromax ProzacNo ratings yet
- CharacteristicDocument9 pagesCharacteristicthanhptitNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- mb134 4 5Document8 pagesmb134 4 5Salvador Sánchez PeralesNo ratings yet
- The non-nil-invariance of periodic topological cyclic homology over positive characteristic fieldsDocument7 pagesThe non-nil-invariance of periodic topological cyclic homology over positive characteristic fieldshuevonomar05No ratings yet
- Stanford Statistical - Fisher InformationDocument7 pagesStanford Statistical - Fisher Informationdim ifkNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- HW 1 SolDocument2 pagesHW 1 SolGonzalo SaavedraNo ratings yet
- "Entropy Inequalities For Discrete ChannelsDocument7 pages"Entropy Inequalities For Discrete Channelschang lichangNo ratings yet
- Integral Transforms SummaryDocument8 pagesIntegral Transforms SummaryDaljit SinghNo ratings yet
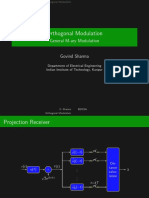
- DC19 Orthogonal ModulationDocument13 pagesDC19 Orthogonal ModulationMalkurthi SreekarNo ratings yet
- + 1 D K D K J K K K 1 K K K T K T K 0Document24 pages+ 1 D K D K J K K K 1 K K K T K T K 0Alvaro CorvalanNo ratings yet
- A Tutorial of The Wavelet Transform: Chun-Lin, Liu February 23, 2010Document72 pagesA Tutorial of The Wavelet Transform: Chun-Lin, Liu February 23, 2010Husam Al-AmeenNo ratings yet
- Lec8h2 OptimalControl PDFDocument83 pagesLec8h2 OptimalControl PDFAnonymous WkbmWCa8MNo ratings yet
- C3 Review Test MSDocument4 pagesC3 Review Test MSprakhar agrawalNo ratings yet
- AssigDocument8 pagesAssigHundaol TesfayeNo ratings yet
- Signal SpaceDocument3 pagesSignal SpaceAbhishek_SafuiNo ratings yet
- Compact Subsets of Lp Spaces CharacterizedDocument6 pagesCompact Subsets of Lp Spaces CharacterizedArkadev GhoshNo ratings yet
- Cram Er-Rao Bound (CRB) and Minimum Variance Unbiased (MVU) EstimationDocument45 pagesCram Er-Rao Bound (CRB) and Minimum Variance Unbiased (MVU) EstimationHira NaeemNo ratings yet
- Brownian MotionDocument6 pagesBrownian MotionXin CuiNo ratings yet
- FAII SkriptDocument83 pagesFAII SkriptLEVA CORDOVA DIEGONo ratings yet
- Lecture 17 SamplingDocument23 pagesLecture 17 SamplingEdgardo ValentinNo ratings yet
- Statistics and Probability Letters: Kenneth S. Berenhaut, John V. Baxley, Robert G. LydayDocument5 pagesStatistics and Probability Letters: Kenneth S. Berenhaut, John V. Baxley, Robert G. LydaySaherNo ratings yet
- Frame SparseDocument40 pagesFrame Sparsesong SongNo ratings yet
- 4404 Notes IsDocument7 pages4404 Notes IsSudeep RajaNo ratings yet
- Statistical Modeling and Inference ExplainedDocument12 pagesStatistical Modeling and Inference ExplainedbobNo ratings yet
- NotationDocument3 pagesNotationDumi dumNo ratings yet
- ELEC221 HW04 Winter2023-1Document16 pagesELEC221 HW04 Winter2023-1Isha ShuklaNo ratings yet
- Lecture 2 ProbabilityDocument28 pagesLecture 2 ProbabilityJ ChoyNo ratings yet
- sns_2021_기말(온라인)Document2 pagessns_2021_기말(온라인)juyeons0204No ratings yet
- Hilbert Space For Random ProcessesDocument11 pagesHilbert Space For Random ProcessesSafa ÇelikNo ratings yet
- Homework I: Sampling Signals and Systems Fourier TransformsDocument2 pagesHomework I: Sampling Signals and Systems Fourier TransformsKARIMNo ratings yet
- The Spectral Gap and Rates of Convergence for Markov ChainsDocument6 pagesThe Spectral Gap and Rates of Convergence for Markov Chainssemselvan794694No ratings yet
- EM Converge SlidesDocument26 pagesEM Converge Slidesyu chenNo ratings yet
- HW 1Document3 pagesHW 1znNo ratings yet
- Chapt7-Final ProofDocument10 pagesChapt7-Final ProofMuhammad Abu BakarNo ratings yet
- 7.4 Expectation-Maximization AlgorithmDocument6 pages7.4 Expectation-Maximization AlgorithmHarsh GokhruNo ratings yet
- QMLN 01 Schrödinger EquationDocument10 pagesQMLN 01 Schrödinger EquationAnum Hosen ShawonNo ratings yet
- I O StabilityDocument11 pagesI O Stabilityanuj kumarNo ratings yet
- Proba Num GPDocument116 pagesProba Num GPkabindingNo ratings yet
- Machine Learning Perceptron Convergence TitleDocument5 pagesMachine Learning Perceptron Convergence TitleZY AungNo ratings yet
- SolutionDocument4 pagesSolutionAssanga RonaldNo ratings yet
- Peskin QFT Solutions PDFDocument173 pagesPeskin QFT Solutions PDFShivam KumarNo ratings yet
- FA 15 16 Ex4 solHWDocument11 pagesFA 15 16 Ex4 solHWboris peñaNo ratings yet
- Random Vector 2Document39 pagesRandom Vector 2NamdevNo ratings yet
- Norwegian university exam on wave propagationDocument7 pagesNorwegian university exam on wave propagationFredy AlbornozNo ratings yet
- Ph.D. Qualifying Exam, Real Analysis September 2005Document3 pagesPh.D. Qualifying Exam, Real Analysis September 2005paimoNo ratings yet
- Fourier Completeness Theorem Proves Periodic Functions Equal SeriesDocument2 pagesFourier Completeness Theorem Proves Periodic Functions Equal SeriesSauvik Chatterjee100% (1)
- Cs229-Notes8 em Algo 2019Document14 pagesCs229-Notes8 em Algo 2019bobNo ratings yet
- 18.650 Statistics For ApplicationsDocument15 pages18.650 Statistics For ApplicationsbobNo ratings yet
- Statistical Modeling and Inference ExplainedDocument12 pagesStatistical Modeling and Inference ExplainedbobNo ratings yet
- 18.650 Statistics For ApplicationsDocument38 pages18.650 Statistics For ApplicationsbobNo ratings yet
- MIT18 650F16 IntroductionDocument46 pagesMIT18 650F16 IntroductionErick DiazNo ratings yet
- A Computer Code For Fully-Coupled Rocket Nozzle Flows - PergamentDocument131 pagesA Computer Code For Fully-Coupled Rocket Nozzle Flows - PergamentSantiago PatitucciNo ratings yet
- Phs SelectionsDocument5 pagesPhs SelectionsadycrsNo ratings yet
- Ramsey Mercury Free Tilt Sensor 8054.0514 CODocument4 pagesRamsey Mercury Free Tilt Sensor 8054.0514 COlf123No ratings yet
- Food Groups Intake in Relation To Stunting Among Exceptional ChildrenDocument8 pagesFood Groups Intake in Relation To Stunting Among Exceptional ChildrenAriqah GinaNo ratings yet
- Object Oriented Programming With C July 2008 OldDocument1 pageObject Oriented Programming With C July 2008 OldPrasad C MNo ratings yet
- Nonuniformity Correction and Correctability of Ir Fpa Schulz1995Document15 pagesNonuniformity Correction and Correctability of Ir Fpa Schulz1995sapa3No ratings yet
- Karmaveer Bhaurao Patil Polytechnic, Satara: Control ActionsDocument104 pagesKarmaveer Bhaurao Patil Polytechnic, Satara: Control Actionsmohammd imran azizNo ratings yet
- Configuring SQL Server 2005 For Use With ShipConstructor - ShipConstructor Knowledge Base - ShipConstructor KnowledgebaseDocument8 pagesConfiguring SQL Server 2005 For Use With ShipConstructor - ShipConstructor Knowledge Base - ShipConstructor KnowledgebaseafandybaharuddinNo ratings yet
- Some Basic Block Codes - 2804Document3 pagesSome Basic Block Codes - 2804Tân ChipNo ratings yet
- An RTL Power Optimization Technique Base PDFDocument4 pagesAn RTL Power Optimization Technique Base PDFmaniNo ratings yet
- Geeks For Geeks - ArrayDocument33 pagesGeeks For Geeks - ArrayLove MehtaNo ratings yet
- Formability analysis of extra-deep drawing steel sheetsDocument11 pagesFormability analysis of extra-deep drawing steel sheetsZubair AhmadNo ratings yet
- A Comparative Study of 6T, 8T and 9T SRAM CellDocument4 pagesA Comparative Study of 6T, 8T and 9T SRAM CellijaertNo ratings yet
- ML 091671403Document6 pagesML 091671403Yongseok JangNo ratings yet
- D EquipmentDocument44 pagesD Equipmentosvald97No ratings yet
- Summer Vacation Homework for Grade 6Document8 pagesSummer Vacation Homework for Grade 6zoha khanNo ratings yet
- Thermodynamic and transport properties of saturated steam and waterDocument26 pagesThermodynamic and transport properties of saturated steam and waterMuhammad Reza FahleviNo ratings yet
- Advanced Process Modeling 1Document41 pagesAdvanced Process Modeling 1mtahir777945No ratings yet
- David Lomas - Notes On Dali and LeonardoDocument39 pagesDavid Lomas - Notes On Dali and LeonardodorutNo ratings yet