You might also like
- 1.1questions AnswersDocument7 pages1.1questions AnswersShiny NivolyaNo ratings yet
- Unit 1 Number SystemsDocument30 pagesUnit 1 Number SystemsAnurag GoelNo ratings yet
- Algorithms 16 00035 With CoverDocument3 pagesAlgorithms 16 00035 With CoverKAMELNo ratings yet
- Algorithms 16 00035 v2Document2 pagesAlgorithms 16 00035 v2KAMELNo ratings yet
- Leader-Follower Formation Control For Quadrotors PDFDocument9 pagesLeader-Follower Formation Control For Quadrotors PDFMd Nur-A-Adam DonyNo ratings yet
- Comparison of PID and Fuzzy Controller For Path Tracking Control of Autonomous Electrical VehiclesDocument10 pagesComparison of PID and Fuzzy Controller For Path Tracking Control of Autonomous Electrical VehiclesFahrezyMiftahulAfifNo ratings yet
- Position Control of A Ball Balancer System Using Particle Swarm Optimization BAT and Flower Pollination AlgorithmDocument17 pagesPosition Control of A Ball Balancer System Using Particle Swarm Optimization BAT and Flower Pollination AlgorithmdangquanginhaNo ratings yet
- HDL 97043Document10 pagesHDL 97043Ahmed Maher Al-maqtariNo ratings yet
- Zhou Et Al 2020 Deep Neural Networks As Add On Modules For Enhancing Robot Performance in Impromptu Trajectory TrackingDocument22 pagesZhou Et Al 2020 Deep Neural Networks As Add On Modules For Enhancing Robot Performance in Impromptu Trajectory Trackinggustavoarins1612No ratings yet
- IndoorUAVControlUsingMulti cameraVisualFeedbackDocument30 pagesIndoorUAVControlUsingMulti cameraVisualFeedbackarifizudin39No ratings yet
- MfoubmoulouYohan MRAC2021 PDFDocument20 pagesMfoubmoulouYohan MRAC2021 PDFOumayNo ratings yet
- Bujang 2020 IOP Conf. Ser. Mater. Sci. Eng. 991 012137Document10 pagesBujang 2020 IOP Conf. Ser. Mater. Sci. Eng. 991 012137احمد نديم اسماعيلNo ratings yet
- Ball Balancing PID System Using Image ProcessingDocument12 pagesBall Balancing PID System Using Image ProcessingIJRASETPublicationsNo ratings yet
- Review, Design, Optimization and Stability Analysis of Fractional-Order PID ControllerDocument24 pagesReview, Design, Optimization and Stability Analysis of Fractional-Order PID ControllerAtul NarkhedeNo ratings yet
- I-PD Controller TuningDocument10 pagesI-PD Controller TuningAfonso AlbuquerqueNo ratings yet
- Ijatcse 56942020Document6 pagesIjatcse 56942020Heartking BibhuNo ratings yet
- Comparitive Study of Fopi and FopidDocument18 pagesComparitive Study of Fopi and FopidrajanNo ratings yet
- Position Control For Ball and Beam System Based On Active Disturbance Rejection ControlDocument13 pagesPosition Control For Ball and Beam System Based On Active Disturbance Rejection Controlcjm122000No ratings yet
- Adaptive Observer Based Data-Driven Control For Nonlinear Discrete-Time ProcessesDocument9 pagesAdaptive Observer Based Data-Driven Control For Nonlinear Discrete-Time ProcessesÃli ZaidiNo ratings yet
- Sensors: An FPGA Based Tracking Implementation For Parkinson's PatientsDocument24 pagesSensors: An FPGA Based Tracking Implementation For Parkinson's Patientsm_gandalfNo ratings yet
- Ijst 2021 1204Document10 pagesIjst 2021 1204BUSARI GANIYUNo ratings yet
- Access 2021 3083705Document13 pagesAccess 2021 3083705tanvir anwarNo ratings yet
- Maximum Sensitivity Ms Based I PD Controller Design For The Control of Integrating Processes With Time DelayDocument21 pagesMaximum Sensitivity Ms Based I PD Controller Design For The Control of Integrating Processes With Time DelayChanya SardanaNo ratings yet
- SaudDocument15 pagesSaudmezianeNo ratings yet
- Electronics: Optimized Proportional-Integral-Derivative Controller For Upper Limb Rehabilitation RobotDocument26 pagesElectronics: Optimized Proportional-Integral-Derivative Controller For Upper Limb Rehabilitation RobotAdeel ur RehmanNo ratings yet
- A Comparative Study of Conventional Pid and Fuzzy-Pid For DC Motor Speed ControlDocument17 pagesA Comparative Study of Conventional Pid and Fuzzy-Pid For DC Motor Speed ControlLarissa Sousa de AndradeNo ratings yet
- DLSU ResCon 2017 Paper 110Document6 pagesDLSU ResCon 2017 Paper 110Ralph Laurence G VisayaNo ratings yet
- Tahir Mahmood - Jeonghwan Gwak - Naeem Jan: Zeeshan AliDocument15 pagesTahir Mahmood - Jeonghwan Gwak - Naeem Jan: Zeeshan Ali胡浩No ratings yet
- Modeling and Control of An Air Levitation Ball and Pipe Laboratory SetupDocument6 pagesModeling and Control of An Air Levitation Ball and Pipe Laboratory SetupYara KhalidNo ratings yet
- Abhaya Resume 2Document5 pagesAbhaya Resume 2AbhayaNo ratings yet
- Sensors 21 05972 v2Document12 pagesSensors 21 05972 v2PODOSALUD HUANCAYONo ratings yet
- A Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMDocument18 pagesA Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMowais khanNo ratings yet
- TL 1Document11 pagesTL 1Tới Hồ VănNo ratings yet
- Fuzzy Control Strategies Development For A 3-DoF RoboticDocument30 pagesFuzzy Control Strategies Development For A 3-DoF RoboticMuhammad SulemanNo ratings yet
- Literature Review Pid ControllerDocument6 pagesLiterature Review Pid Controlleraflskeqjr100% (1)
- 5 Metodos de Discretizacao 05Document6 pages5 Metodos de Discretizacao 05Rodrigo PintoNo ratings yet
- 1-S2.0-S2352484723010454-Main 2022Document11 pages1-S2.0-S2352484723010454-Main 2022doni erlanggaNo ratings yet
- Trajectory Tracking of Wheeled Mobile Robots UsingDocument16 pagesTrajectory Tracking of Wheeled Mobile Robots UsingmezianeNo ratings yet
- Crop Yield Prediction Using Machine Learning - 2020 - Computers and ElectronicDocument18 pagesCrop Yield Prediction Using Machine Learning - 2020 - Computers and ElectronicMichael Wondemu50% (2)
- Design and Experimentation of A Self-Tuning PID Control Applied To The 3DOF HelicopterDocument21 pagesDesign and Experimentation of A Self-Tuning PID Control Applied To The 3DOF HelicopterMairaj-ud-din MuftiNo ratings yet
- Research Paper On Pid ControllerDocument4 pagesResearch Paper On Pid ControlleryelbsyvkgNo ratings yet
- Sahu2016Document22 pagesSahu2016Mohamed SobhyNo ratings yet
- 1 s2.0 S0960852422017849 MainDocument12 pages1 s2.0 S0960852422017849 MainMarwa SamierNo ratings yet
- Tracking Locomotion Using Reinforcement LearningDocument9 pagesTracking Locomotion Using Reinforcement LearningIJRASETPublicationsNo ratings yet
- Object-Level TrajectoriesDocument9 pagesObject-Level Trajectorieskk notesNo ratings yet
- Zimit 2018Document16 pagesZimit 2018Trường Quang NguyễnNo ratings yet
- Continuous Human Learning Optimizerbased PIDController Designofan Automatic Voltage Regulator SystemDocument7 pagesContinuous Human Learning Optimizerbased PIDController Designofan Automatic Voltage Regulator SystemMustafa AlhumayreNo ratings yet
- Document 1Document16 pagesDocument 1Su BoccardNo ratings yet
- Object Tracking Thesis PDFDocument8 pagesObject Tracking Thesis PDFmelissawilsonmanchester100% (2)
- Chrono-Gait Image A Novel Temporal Template For GaDocument15 pagesChrono-Gait Image A Novel Temporal Template For GaHosein GhaeminiaNo ratings yet
- (Réalisation) FPGA in The Loop Implementation For Observer Sliding ModeDocument16 pages(Réalisation) FPGA in The Loop Implementation For Observer Sliding ModeJamal KhyatNo ratings yet
- Spe 205627 MsDocument8 pagesSpe 205627 MsXu ZhaohuiNo ratings yet
- Biometric Authentication Using Human FootprintDocument7 pagesBiometric Authentication Using Human FootprintSaida RasulNo ratings yet
- 10 1109iccakm46823 2020 9051533Document6 pages10 1109iccakm46823 2020 9051533احمد نديم اسماعيلNo ratings yet
- 1 s2.0 S266672072300108X MainDocument27 pages1 s2.0 S266672072300108X Maindawit ashagrieNo ratings yet
- Performance Analysis of PID PD and Fuzzy ControlleDocument9 pagesPerformance Analysis of PID PD and Fuzzy ControlleNH NghĩaNo ratings yet
- Pdes 2022Document6 pagesPdes 2022mirceaNo ratings yet
- A PID-Type Fuzzy Logic Controller-Based Approach For Motion Control ApplicationsDocument19 pagesA PID-Type Fuzzy Logic Controller-Based Approach For Motion Control ApplicationsAlexandre RezendeNo ratings yet
- Improved Whale Optimization Algorithm Applied To Design PID Plus Second-Order Derivative Controller For Automatic Voltage Regulator SystemDocument13 pagesImproved Whale Optimization Algorithm Applied To Design PID Plus Second-Order Derivative Controller For Automatic Voltage Regulator SystemchanveerNo ratings yet
- Nature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsFrom EverandNature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsNo ratings yet
- Model Driven Development for Embedded Software: Application to Communications for Drone SwarmFrom EverandModel Driven Development for Embedded Software: Application to Communications for Drone SwarmNo ratings yet
- Residual Life Prediction and Optimal Maintenance Decision for a Piece of EquipmentFrom EverandResidual Life Prediction and Optimal Maintenance Decision for a Piece of EquipmentNo ratings yet
- Simulation Study of Poultry Sludge Gasification Using Aspen PlusDocument7 pagesSimulation Study of Poultry Sludge Gasification Using Aspen PlusMartha AlbaNo ratings yet
- Simulation Study of Poultry Sludge Gasification Using Aspen PlusDocument7 pagesSimulation Study of Poultry Sludge Gasification Using Aspen PlusMartha AlbaNo ratings yet
- Determinación de La Cinética de Producción de Biogás A Partir de Racimos Sin Frutos de Palma AceiteraDocument7 pagesDeterminación de La Cinética de Producción de Biogás A Partir de Racimos Sin Frutos de Palma AceiteraMartha AlbaNo ratings yet
- CEM Continuous Stirred Tank Reactor - Run 1 ResultsDocument20 pagesCEM Continuous Stirred Tank Reactor - Run 1 ResultsMartha AlbaNo ratings yet
- Copia de ResultadosCSTR13092Document16 pagesCopia de ResultadosCSTR13092Martha AlbaNo ratings yet
- Process Control CHP5Document29 pagesProcess Control CHP5Martha AlbaNo ratings yet
- Model Predictive Control For Batch Reactors (Khäm, 2018)Document16 pagesModel Predictive Control For Batch Reactors (Khäm, 2018)Martha AlbaNo ratings yet
- Dynamic Model of The Grinding Process: Short CommunicationDocument8 pagesDynamic Model of The Grinding Process: Short CommunicationMartha AlbaNo ratings yet
- Ozudogru - Technoeconomic - 2018Document247 pagesOzudogru - Technoeconomic - 2018Martha AlbaNo ratings yet
- Capstone Project Final Workshop CompetencesDocument8 pagesCapstone Project Final Workshop CompetencesMartha AlbaNo ratings yet
- Monosodium Glutamate (MSG) Production Via Fermentation - Process Modeling and Techno-Economic Assessment (Tea) Using Superpro DesignerDocument16 pagesMonosodium Glutamate (MSG) Production Via Fermentation - Process Modeling and Techno-Economic Assessment (Tea) Using Superpro DesignerMartha AlbaNo ratings yet
- 2013 Scottetal Biotechnol Biofuels 6171Document17 pages2013 Scottetal Biotechnol Biofuels 6171Martha AlbaNo ratings yet
- Preparation of Nitrogen-Doped Carbon Material From Monosodium Glutamate and Its Catalytic PerformanceDocument7 pagesPreparation of Nitrogen-Doped Carbon Material From Monosodium Glutamate and Its Catalytic PerformanceMartha AlbaNo ratings yet
- CH EN 5253 Process Design II: Attainable RegionDocument46 pagesCH EN 5253 Process Design II: Attainable RegionMartha AlbaNo ratings yet
- Attainable Region For Biobutanol Production: PosterDocument2 pagesAttainable Region For Biobutanol Production: PosterMartha AlbaNo ratings yet
- Agriengineering 02 00027Document15 pagesAgriengineering 02 00027Martha AlbaNo ratings yet
- Material To Lecture 3Document6 pagesMaterial To Lecture 3Данила ДенисовNo ratings yet
- Digital Logic and DesignDocument54 pagesDigital Logic and DesignANJALI PATELNo ratings yet
- MAT 3633 Note 1 Lagrange Interpolation: 1.1 The Lagrange Interpolating PolynomialDocument16 pagesMAT 3633 Note 1 Lagrange Interpolation: 1.1 The Lagrange Interpolating PolynomialKuhu KoyaliyaNo ratings yet
- Applications of Partial Differential Equations in Reservoir SimulationDocument7 pagesApplications of Partial Differential Equations in Reservoir SimulationAbdul GhaffarNo ratings yet
- Mathemathics SPM: A Worksheet A Day, Keeps Bad Grades Away !Document11 pagesMathemathics SPM: A Worksheet A Day, Keeps Bad Grades Away !MrinaliniNo ratings yet
- Christopher L. Henley - Effective-Hamiltonian Approach To Long-Range Spin Order in The Classical Kagome AntiferromagnetDocument4 pagesChristopher L. Henley - Effective-Hamiltonian Approach To Long-Range Spin Order in The Classical Kagome AntiferromagnetPo48HSDNo ratings yet
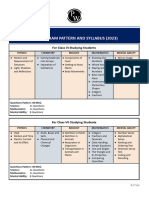
- PWNSAT 2023 SyllabusDocument5 pagesPWNSAT 2023 SyllabusBaby SinghNo ratings yet
- ChapterStat 2Document77 pagesChapterStat 2Md Aziq Md RaziNo ratings yet
- Asymptotic Analysis-1/KICSIT/Mr. Fahim Khan/1Document29 pagesAsymptotic Analysis-1/KICSIT/Mr. Fahim Khan/1Sanwal abbasiNo ratings yet
- 2018 04 Exam Stam QuestionsDocument14 pages2018 04 Exam Stam QuestionsInsani Putri EdiNo ratings yet
- Practice For 2ND PTDocument3 pagesPractice For 2ND PTCherry CabatbatNo ratings yet
- Waveform Synthesis Using Laplace TransformDocument3 pagesWaveform Synthesis Using Laplace Transformkvamsee112No ratings yet
- MATH 105 SAC Project 1Document2 pagesMATH 105 SAC Project 1api-3808536No ratings yet
- Theorems On Tangent and SecantDocument37 pagesTheorems On Tangent and SecantxannieNo ratings yet
- Allan White PDFDocument17 pagesAllan White PDFAnonymous RMXuPuNo ratings yet
- Math Paper1FDocument20 pagesMath Paper1FVarun PanickerNo ratings yet
- 2303 08628 PDFDocument11 pages2303 08628 PDFTa BarNo ratings yet
- Deflection NptelDocument11 pagesDeflection NptelhariNo ratings yet
- 439006Document6 pages439006sdfr100% (1)
- Y9 Solving PBLDocument19 pagesY9 Solving PBLhoneyoopsyaaNo ratings yet
- Systematic Circuit Analysis: Nodal Analysis Chapter 4 Section 1Document55 pagesSystematic Circuit Analysis: Nodal Analysis Chapter 4 Section 1Marvin - Soriente VILLALUNANo ratings yet
- Test 1. SequencesDocument3 pagesTest 1. SequencessohamNo ratings yet
- Modular NumberDocument70 pagesModular NumberPeiEnOngNo ratings yet
- Gagan Pratap Arithmetic Chapter 1Document90 pagesGagan Pratap Arithmetic Chapter 1vishal71% (7)
- SLRP For Acquisition G4Document7 pagesSLRP For Acquisition G4John Andrew Galagar100% (1)
- Sri Ramachandra School, Jangareddigudem Formative Assessment-I MathematicsDocument3 pagesSri Ramachandra School, Jangareddigudem Formative Assessment-I MathematicsRamesh Babu KommuNo ratings yet
- Department of Mathematics & Statistics St. Xavier'S College, RanchiDocument6 pagesDepartment of Mathematics & Statistics St. Xavier'S College, RanchiAlok RanjanNo ratings yet