You might also like
- Statement:: L J J M J MDocument1 pageStatement:: L J J M J MGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-24Document1 pageStatement: Solution:: PROBLEM 2-24GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-34Document1 pageStatement:: PROBLEM 2-34GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-27Document1 pageStatement:: PROBLEM 2-27Mulham Inspired HarrasiNo ratings yet
- Statement:: PROBLEM 2-13Document1 pageStatement:: PROBLEM 2-13GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document4 pagesStatement: Solution:: Problem 2-8Dio ChanNo ratings yet
- Statement:: PROBLEM 2-14Document1 pageStatement:: PROBLEM 2-14GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Homework 1 SolutionDocument5 pagesHomework 1 SolutionMrinmoy SahaNo ratings yet
- Statement: Solution:: Problem 2-9Document1 pageStatement: Solution:: Problem 2-9GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-7Document2 pagesStatement: Solution:: Problem 2-7GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-21Document3 pagesStatement: Solution:: PROBLEM 2-21GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-30Document1 pageStatement:: PROBLEM 2-30GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document1 pageStatement: Solution:: Problem 2-8GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: Problem 2-1Document2 pagesStatement:: Problem 2-1Gustavo CopplaNo ratings yet
- Statement:: Problem 2-1Document2 pagesStatement:: Problem 2-1GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Chapter 27 - Practice 1Document2 pagesChapter 27 - Practice 1Mohd KassabNo ratings yet
- Finite Element Method: Beam AnalysisDocument10 pagesFinite Element Method: Beam AnalysisZaffira RahmanNo ratings yet
- Unit 8 Practice Sheet: Code Converters, Multiplexers, & Demultiplexers EET 1131 ReederDocument10 pagesUnit 8 Practice Sheet: Code Converters, Multiplexers, & Demultiplexers EET 1131 ReederCarlos OrtegaNo ratings yet
- Statement:: PROBLEM 2-56Document1 pageStatement:: PROBLEM 2-56GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
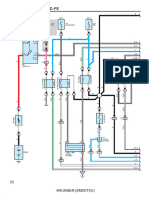
- 4RUNNER 2006 Engine Control For 2UZ-FEDocument14 pages4RUNNER 2006 Engine Control For 2UZ-FEJamsyare MendozaNo ratings yet
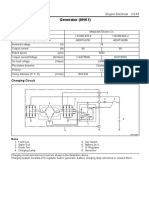
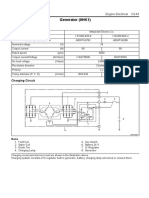
- Generator (6HK1)Document2 pagesGenerator (6HK1)Oggy ToffyNo ratings yet
- Generator (6HK1) : SpecificationsDocument2 pagesGenerator (6HK1) : SpecificationsOggy ToffyNo ratings yet
- Cigarette Lighter and ClockDocument2 pagesCigarette Lighter and ClockEsteban LefontNo ratings yet
- ADC0809 With CKT, Flow CodeDocument8 pagesADC0809 With CKT, Flow CodeBhaskar Rao PNo ratings yet
- 4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementDocument1 page4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- EE306#2Document6 pagesEE306#2Hasan ToubasiNo ratings yet
- Statement:: PROBLEM 2-31Document1 pageStatement:: PROBLEM 2-31GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- IOP Program Description: Use This Short-Form Register Planner or The Full Length Version, As NeededDocument1 pageIOP Program Description: Use This Short-Form Register Planner or The Full Length Version, As Neededjohn@duncancrossNo ratings yet
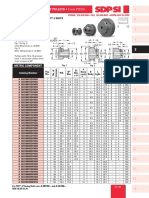
- GT 2 / GT 3 Timing Belt Pulleys - 2 MM Pitch: Double or No Flange ProfileDocument1 pageGT 2 / GT 3 Timing Belt Pulleys - 2 MM Pitch: Double or No Flange ProfileJohandry MartínezNo ratings yet
- Screw Threads, Bolts and NutsDocument10 pagesScrew Threads, Bolts and NutsSayphone HoungbounyuangNo ratings yet
- M.S Comprehensive Examination AnalysisDocument9 pagesM.S Comprehensive Examination AnalysisRAFAELNo ratings yet
- Network AnalysisDocument5 pagesNetwork AnalysisRudraksh MandhareNo ratings yet
- Generating Network DiagrammsDocument6 pagesGenerating Network DiagrammsSammy-papa Maropeng ShikaNo ratings yet
- Engine ControlDocument12 pagesEngine Controlk4k4zimNo ratings yet
- Column 7Document1 pageColumn 7Nimeshkumar PatelNo ratings yet
- 018 Ect 3 MDocument8 pages018 Ect 3 MFausto LojaNo ratings yet
- Classwork 7: Assembly Drawing 2: Part 3: Spring Comp. Length 40 Wire Radius 0.8 12 Coils Length 90 O.D. 15 5120 SteelDocument3 pagesClasswork 7: Assembly Drawing 2: Part 3: Spring Comp. Length 40 Wire Radius 0.8 12 Coils Length 90 O.D. 15 5120 Steel92alaaNo ratings yet
- 2011 Lexus CT200h Hybrid System Wiring DiagramDocument46 pages2011 Lexus CT200h Hybrid System Wiring Diagramjorge Angel LopeNo ratings yet
- LED Display Datasheet - 19391Document1 pageLED Display Datasheet - 19391Benjamin DoverNo ratings yet
- (ACC) (IG) (BAT) (BAT) (BAT) Main Body ECU: Door Lock ControlDocument16 pages(ACC) (IG) (BAT) (BAT) (BAT) Main Body ECU: Door Lock Controldima65No ratings yet
- Poskom PSU: 1. SpecificationDocument2 pagesPoskom PSU: 1. SpecificationEduardo Vallejos AlfaroNo ratings yet
- Lecture 3 Elements BC Loading Materials UpdatedDocument107 pagesLecture 3 Elements BC Loading Materials UpdatedHaytham AlmaghariNo ratings yet
- MCSEM Test 2021 02 22 SolutionDocument6 pagesMCSEM Test 2021 02 22 SolutionThanujaNo ratings yet
- CM Exam Prep Notes-Part 13Document5 pagesCM Exam Prep Notes-Part 13SuthaNo ratings yet
- Midsem SolutionsDocument8 pagesMidsem Solutionsobservercosmonaut2005No ratings yet
- Ga02298 PertDocument7 pagesGa02298 PertiskandarbasiruddinNo ratings yet
- Department of Aviation Engineering Technology Superior UniversityDocument7 pagesDepartment of Aviation Engineering Technology Superior UniversityARSLAN IJAZNo ratings yet
- DC Machine Armature Winding (Hadi Saadat) : Z CN Z C NDocument4 pagesDC Machine Armature Winding (Hadi Saadat) : Z CN Z C NPiyush Kumar RaiNo ratings yet
- SPC Caliber 115Document59 pagesSPC Caliber 115Edwin RiveraNo ratings yet
- Or II 01 Network1Document64 pagesOr II 01 Network1Ceria MadaNo ratings yet
- US1892217Document9 pagesUS1892217oreamigNo ratings yet
- PIC Trainer Kit User Manual ARM Trainer Kit User ManualDocument15 pagesPIC Trainer Kit User Manual ARM Trainer Kit User Manualgracianocalunga5No ratings yet
- HEF4071BDocument9 pagesHEF4071Bkopii0548No ratings yet
- HEF4081BDocument9 pagesHEF4081BGerman PascucciNo ratings yet
- EEEB 111 Electrical and Electronics Measurement Laboratory: SPICE Netlist Creation For Circuit SimulationDocument9 pagesEEEB 111 Electrical and Electronics Measurement Laboratory: SPICE Netlist Creation For Circuit Simulationaqil afhamNo ratings yet
- Mclaughlin You KnowDocument1 pageMclaughlin You KnowJohn IvanNo ratings yet
- Trusses: Engr Charlton S. InaoDocument31 pagesTrusses: Engr Charlton S. InaoalexNo ratings yet
- BackslagDocument13 pagesBackslagPer LöfgrenNo ratings yet
- Exploded Views and Parts List (ML-2010 /) : R SEEDocument11 pagesExploded Views and Parts List (ML-2010 /) : R SEEGoran Ristic-RileNo ratings yet
- Statement:: PROBLEM 2-43Document1 pageStatement:: PROBLEM 2-43GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-53Document1 pageStatement:: PROBLEM 2-53GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-56Document1 pageStatement:: PROBLEM 2-56GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-36Document1 pageStatement:: PROBLEM 2-36GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-44Document1 pageStatement:: PROBLEM 2-44GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Condition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseDocument1 pageCondition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-7Document2 pagesStatement: Solution:: Problem 2-7GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-21Document3 pagesStatement: Solution:: PROBLEM 2-21GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-15Document1 pageStatement:: PROBLEM 2-15GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-32Document1 pageStatement:: PROBLEM 2-32GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- 4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementDocument1 page4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-31Document1 pageStatement:: PROBLEM 2-31GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-18Document1 pageStatement:: PROBLEM 2-18GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-30Document1 pageStatement:: PROBLEM 2-30GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-23Document1 pageStatement: Solution:: PROBLEM 2-23GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-11Document1 pageStatement:: PROBLEM 2-11GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document1 pageStatement: Solution:: Problem 2-8GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-9Document1 pageStatement: Solution:: Problem 2-9GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-14Document1 pageStatement:: PROBLEM 2-14GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-12Document4 pagesStatement:: PROBLEM 2-12GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: Inversions. How Many Distinct Inversions Does The Linkage in Row 4, Column 1 Have?Document1 pageStatement:: Inversions. How Many Distinct Inversions Does The Linkage in Row 4, Column 1 Have?GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-28Document1 pageStatement: Solution:: PROBLEM 2-28GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-35Document1 pageStatement:: PROBLEM 2-35GUSTAVO VINICIUS VIEIRA MELLONo ratings yet