You might also like
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- REAM HMI With Military ConnectorsDocument23 pagesREAM HMI With Military ConnectorsVirnando NainggolanNo ratings yet
- Ziegler-Mfm-3480 Manual-E1R0Document78 pagesZiegler-Mfm-3480 Manual-E1R0Naveed Syed MohammadNo ratings yet
- Motor Current Signature AnalysisDocument25 pagesMotor Current Signature Analysismayur dhandeNo ratings yet
- HA Series Hematology AnalyzerDocument43 pagesHA Series Hematology AnalyzerFrankie Lam75% (4)
- Microcontroller & Embedded Systems Subject Code: EC-604Document7 pagesMicrocontroller & Embedded Systems Subject Code: EC-604DEFENCE MOTIVATIONNo ratings yet
- Kian Sanat MR - Lavasani: ManualDocument56 pagesKian Sanat MR - Lavasani: ManualMiroslav MervaNo ratings yet
- Intelligent Vehicle Management Using MicrocontrollersDocument41 pagesIntelligent Vehicle Management Using MicrocontrollersRamesh BiradarNo ratings yet
- Ultrasound Digital DopplerDocument68 pagesUltrasound Digital DopplerAlia PopaNo ratings yet
- SA Unit 4 - Session 1-1Document34 pagesSA Unit 4 - Session 1-1Yashi SinghNo ratings yet
- Distributed Control SystemsDocument24 pagesDistributed Control SystemsPraveen Madhusoodhanan100% (1)
- CA Bmi SatyaDocument60 pagesCA Bmi SatyaMr. RAVI KUMAR INo ratings yet
- Twave General 110422Document23 pagesTwave General 110422Mallikarjunareddy PNo ratings yet
- User Manual Stream Selector SS 301Document24 pagesUser Manual Stream Selector SS 301manish kumar60% (5)
- TOMAS UsersManualDocument94 pagesTOMAS UsersManualrodruren01No ratings yet
- EAS AM Software Users ManualDocument14 pagesEAS AM Software Users ManualKHAIRIL ASNURNo ratings yet
- Chapter 1: Getting ReadyDocument14 pagesChapter 1: Getting ReadyKarthikeyanNo ratings yet
- Ect 4400 Manual Revision 0.93Document43 pagesEct 4400 Manual Revision 0.93Luis Hernandez CamposNo ratings yet
- Edu32fp Manual RitterDocument22 pagesEdu32fp Manual Rittersnikt7863443No ratings yet
- DAQ System ElementsDocument15 pagesDAQ System ElementsGowthamanNo ratings yet
- Blan flowMeterB2800 Um PDFDocument28 pagesBlan flowMeterB2800 Um PDFHAROL ALEXIS VALENCIA OSPINANo ratings yet
- CARE, IIT Delhi CRP718 - 2015-16/1 Semester Experiment On PC Based Multi-Channel Data Acquisition. 1. ObjectivesDocument9 pagesCARE, IIT Delhi CRP718 - 2015-16/1 Semester Experiment On PC Based Multi-Channel Data Acquisition. 1. ObjectivesPunitNo ratings yet
- Samsung SCX-4521F Operation Instruction & InstallationDocument15 pagesSamsung SCX-4521F Operation Instruction & InstallationSylverNickNo ratings yet
- TLE4997/98 Evaluation Kit Software GuideDocument26 pagesTLE4997/98 Evaluation Kit Software GuideKhangLeNo ratings yet
- En - stm32l4 WDG Timers GptimDocument64 pagesEn - stm32l4 WDG Timers GptimGia LữNo ratings yet
- En - stm32f7 WDG Timers GptimDocument61 pagesEn - stm32f7 WDG Timers GptimLODELBARRIO RDNo ratings yet
- User S Manual Fuel Dispenser EnG (087 116)Document30 pagesUser S Manual Fuel Dispenser EnG (087 116)sam tariqNo ratings yet
- 3.2.2.6 Frame For Rotor Temperature Alarm Value SetupDocument51 pages3.2.2.6 Frame For Rotor Temperature Alarm Value SetupClip nhungcaunoihayNo ratings yet
- Dpmeterxt2: ManualDocument15 pagesDpmeterxt2: ManualJose Luis DorronsoroNo ratings yet
- Manual: 24/7 - C For PowercoreDocument6 pagesManual: 24/7 - C For PowercoreJan RiveraNo ratings yet
- Computer Sonics Radial Bond ServicesDocument31 pagesComputer Sonics Radial Bond Servicesandy xuuNo ratings yet
- Introduction to Process Control SystemsDocument59 pagesIntroduction to Process Control SystemsUdit Upreti100% (1)
- Thermal Printer Reference Design Using TM4C1233H6PM: Application ReportDocument13 pagesThermal Printer Reference Design Using TM4C1233H6PM: Application ReportTufulNo ratings yet
- Atmel 42181 SAM D21 DatasheetDocument1,117 pagesAtmel 42181 SAM D21 DatasheetJosé PerezNo ratings yet
- ATM Terminal Design Based On Figure Print Recognition DocuDocument115 pagesATM Terminal Design Based On Figure Print Recognition DocuPraveen NaiduNo ratings yet
- 110758-W2-US LCR-Meter Operating Instructions enDocument13 pages110758-W2-US LCR-Meter Operating Instructions enadamatozNo ratings yet
- Objective and AimDocument6 pagesObjective and AimSaadat ZaidiNo ratings yet
- ECR MachineDocument37 pagesECR Machineapi-3721578100% (1)
- Digital-to-Analog Converter Subsystem: Team Johnny BravoDocument16 pagesDigital-to-Analog Converter Subsystem: Team Johnny BravoGonghao SunNo ratings yet
- Cordex CXCM1+: System ControllerDocument2 pagesCordex CXCM1+: System ControllerVinicius SantosNo ratings yet
- Calculator With Keypad and LCDDocument30 pagesCalculator With Keypad and LCDSyed Ariful Islam Emon67% (3)
- MP760 User ManualDocument15 pagesMP760 User ManualfedoralinNo ratings yet
- 1.2 Parts of A DAQ SystemDocument37 pages1.2 Parts of A DAQ SystemMaddipati SumanthNo ratings yet
- Am 8212 Maintenance Manual 8AL90334ENAA 1 enDocument17 pagesAm 8212 Maintenance Manual 8AL90334ENAA 1 enissa galalNo ratings yet
- Eric Hodel - Service Training InstructorDocument50 pagesEric Hodel - Service Training Instructorabduallah muhammadNo ratings yet
- PPC512 ManualDocument187 pagesPPC512 Manualaetlantra110No ratings yet
- Iii B.Tech Ii Sem Eie (R18) : Unit - VDocument62 pagesIii B.Tech Ii Sem Eie (R18) : Unit - VSrinivas PapaniNo ratings yet
- Cs3000 OperationDocument63 pagesCs3000 Operationpsshnkr100% (1)
- MPL User Guide - Oct 2003Document18 pagesMPL User Guide - Oct 2003diazoscurosNo ratings yet
- Buses or Data Highways. Since An Interface Bus Is A Parallel Assembly of Connections, Data IsDocument13 pagesBuses or Data Highways. Since An Interface Bus Is A Parallel Assembly of Connections, Data Isranbeer1991No ratings yet
- UniSCAN NX - H - V - PrinterDocument7 pagesUniSCAN NX - H - V - PrinterYogesh RamdasiNo ratings yet
- Online Vibration Monitoring SystemDocument2 pagesOnline Vibration Monitoring SystemJagan TnNo ratings yet
- TX4400 Manual v0.94Document39 pagesTX4400 Manual v0.94ahmedalishNo ratings yet
- Schneider Relay GuideDocument56 pagesSchneider Relay GuideRajendra Prasath Thangamani100% (1)
- Powerpad Model 3945-B: Display and Record Waveforms, Transients, Trend Data and Events Simultaneously!Document12 pagesPowerpad Model 3945-B: Display and Record Waveforms, Transients, Trend Data and Events Simultaneously!DiegoGabrielNo ratings yet
- Infineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENDocument42 pagesInfineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENFatenn BellakhdharNo ratings yet
- Introduction To Microprocessor-Based ControlDocument42 pagesIntroduction To Microprocessor-Based ControlAhdan FawwazNo ratings yet
- Elnet LTE UserManualDocument21 pagesElnet LTE UserManualCristobal MUñoz Sepulveda100% (1)
- Distributed Control Systems: Emad Ali Chemical Engineering Department King SAUD UniversityDocument24 pagesDistributed Control Systems: Emad Ali Chemical Engineering Department King SAUD UniversitynaeemfaysalNo ratings yet
- Manual enDocument35 pagesManual enharounNo ratings yet
- Ream Hmi For Coiled TubingDocument59 pagesReam Hmi For Coiled TubingharounNo ratings yet
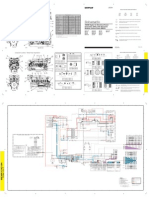
- Diagrama c15Document2 pagesDiagrama c15anon_958967253No ratings yet
- Mail Smart MonitorDocument1 pageMail Smart MonitorharounNo ratings yet
- Depth Features - V4.2.3Document27 pagesDepth Features - V4.2.3harounNo ratings yet
- DART ManualDocument25 pagesDART ManualBrayan ONo ratings yet
- CT#03 Power Pack Trouble ShootingDocument1 pageCT#03 Power Pack Trouble ShootingharounNo ratings yet
- RTOM - RTDS - DOC - Procedure Data Transmission RTOM SERVA ViewDocument14 pagesRTOM - RTDS - DOC - Procedure Data Transmission RTOM SERVA ViewharounNo ratings yet
- JDAS Quick Start GuideDocument87 pagesJDAS Quick Start GuideharounNo ratings yet
- Sauerdanfoss Group 2 Gear Pumps Catalogue en PDFDocument48 pagesSauerdanfoss Group 2 Gear Pumps Catalogue en PDFShariq KhanNo ratings yet
- PV776 89046912 PDFDocument82 pagesPV776 89046912 PDFCesar Bayes RamosNo ratings yet
- 586 ManualDocument34 pages586 ManualAnonymous V9fdC6No ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document14 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768harounNo ratings yet
- Cummins: ISX15 CM2250Document17 pagesCummins: ISX15 CM2250haroun100% (4)
- Diagrama c15Document2 pagesDiagrama c15anon_958967253No ratings yet
- Installation Guide MiX 4000Document35 pagesInstallation Guide MiX 4000harounNo ratings yet
- Cementing Services SCM W/MK IV AT International Twin Cementing Skid Operator Training ManualDocument372 pagesCementing Services SCM W/MK IV AT International Twin Cementing Skid Operator Training ManualharounNo ratings yet
- Software Installation: File - New File - OpenDocument18 pagesSoftware Installation: File - New File - Openharoun100% (1)
- 2REX-A Encoder Shaft SpecsDocument8 pages2REX-A Encoder Shaft SpecsharounNo ratings yet
- NPS Job Bonus 07 July Daoui NDocument1 pageNPS Job Bonus 07 July Daoui NharounNo ratings yet
- Cat 3512BDocument2 pagesCat 3512Bmuhammad arif100% (4)
- Quick Start Guide: Digital Weighing Indicator WE2111Document108 pagesQuick Start Guide: Digital Weighing Indicator WE2111harounNo ratings yet
- 2REX-A Encoder Shaft SpecsDocument8 pages2REX-A Encoder Shaft SpecsharounNo ratings yet
- Crane Safety BasicsDocument151 pagesCrane Safety BasicsharounNo ratings yet
- Diagnostic Fault Codes For Cummins EnginesDocument26 pagesDiagnostic Fault Codes For Cummins Enginesartmehr100% (12)
- Proline Promass 83F and 83E PDFDocument138 pagesProline Promass 83F and 83E PDFharounNo ratings yet
- 81W173047 (P13069) PDFDocument435 pages81W173047 (P13069) PDFharounNo ratings yet
- Crane Safety BasicsDocument151 pagesCrane Safety BasicsharounNo ratings yet
- DSU Module: ABB ACS800-704-0910-7 Made in FinlandeDocument7 pagesDSU Module: ABB ACS800-704-0910-7 Made in Finlandeharoun0% (1)
- Jenbacher: 1100-0112 Installation of GE Jenbacher UnitsDocument9 pagesJenbacher: 1100-0112 Installation of GE Jenbacher UnitsArîfNo ratings yet
- Codan 9323-9360 Reference ManualDocument228 pagesCodan 9323-9360 Reference ManualHelen HelenopoulosNo ratings yet
- Voltage Regulator For Generators: Instruction Manual V1.3.1Document20 pagesVoltage Regulator For Generators: Instruction Manual V1.3.1fahad pirzadaNo ratings yet
- Cable Connector PDFDocument2 pagesCable Connector PDFWathsalaNo ratings yet
- XMT SI 485 and XMP SI RF ATG Probes Technical GuideDocument32 pagesXMT SI 485 and XMP SI RF ATG Probes Technical GuideAbraham Flores100% (2)
- RP55178ENDocument3 pagesRP55178ENИван КозубовNo ratings yet
- SIG Motorized ValveDocument6 pagesSIG Motorized ValveAlexandre FerreiraNo ratings yet
- Positioner: Installation Operation and Maintenance ManualDocument131 pagesPositioner: Installation Operation and Maintenance ManualRADHAKRISHNANNo ratings yet
- Specification For Contract of F-7006Document3,366 pagesSpecification For Contract of F-7006mutasim.jadallaNo ratings yet
- Manual de utilizare Acumulator Lifepo4 Ecobat Energy Powercube 51.2V 100Ah 5.12KWh pentru sisteme fotovoltaice - ecobatenergy.roDocument35 pagesManual de utilizare Acumulator Lifepo4 Ecobat Energy Powercube 51.2V 100Ah 5.12KWh pentru sisteme fotovoltaice - ecobatenergy.roSoos JozsefNo ratings yet
- 1x2x18 AWG Overall Shielded Instrumentation Cable With Steel Wire ArmorDocument2 pages1x2x18 AWG Overall Shielded Instrumentation Cable With Steel Wire ArmorJosé AntonioNo ratings yet
- 16 PSM0217-1 Pressure Switch ManualDocument2 pages16 PSM0217-1 Pressure Switch ManualJulioCesarNo ratings yet
- Troubleshooting Reference - 7000Document16 pagesTroubleshooting Reference - 7000Marine JolieNo ratings yet
- Satip P 121 01 Rev 7 MPDocument7 pagesSatip P 121 01 Rev 7 MPmohamedqcNo ratings yet
- Installation Manual Inmarsat-C Mes Felcom18: ModelDocument62 pagesInstallation Manual Inmarsat-C Mes Felcom18: Modelsrinu19840% (1)
- Unit IVDocument267 pagesUnit IVhabaga1835No ratings yet
- Hilti FS ManualDocument514 pagesHilti FS ManualHard T. Target100% (1)
- Hexa Series EM64xxH and PM1130H - METSEEM6436HCL10RSDocument4 pagesHexa Series EM64xxH and PM1130H - METSEEM6436HCL10RSNandgulab DeshmukhNo ratings yet
- Iec Standard Cable LugsDocument4 pagesIec Standard Cable LugsYuliandiHidayat Gacodi Dalimunthe100% (2)
- Triband Eight-Port Antenna: Opa65R-Ke4D Data SheetDocument13 pagesTriband Eight-Port Antenna: Opa65R-Ke4D Data SheetGuillermoNo ratings yet
- Series 47K Gas Detector: Operation ManualDocument32 pagesSeries 47K Gas Detector: Operation ManualGunawan MSNo ratings yet
- Cable Schedule For MCC To PLC&RIO Panel-RDocument22 pagesCable Schedule For MCC To PLC&RIO Panel-RJagadeesan ShanmugamNo ratings yet
- Rhino2 Installation Manual Issue 3 - 0 PDFDocument133 pagesRhino2 Installation Manual Issue 3 - 0 PDFDhany SiregarNo ratings yet
- Reference Manual Ac Servo Drive Unit DSK 12: Eduard Bautz GMBHDocument61 pagesReference Manual Ac Servo Drive Unit DSK 12: Eduard Bautz GMBHalan nietoNo ratings yet
- Ba Sarexc1!07!16 Acexc1 Nonin Dp1 FM enDocument48 pagesBa Sarexc1!07!16 Acexc1 Nonin Dp1 FM enkpr_02161371No ratings yet
- User Manual Kullanim Kilavuzu: Rs 350 M Pro - Rs 350 MW Pro Rs 450 M Pro - Rs 450 MW Pro Rs 550 M Pro - Rs 550 MW ProDocument88 pagesUser Manual Kullanim Kilavuzu: Rs 350 M Pro - Rs 350 MW Pro Rs 450 M Pro - Rs 450 MW Pro Rs 550 M Pro - Rs 550 MW ProSerhan AysanNo ratings yet
- NBC ChecklistDocument24 pagesNBC ChecklistagarNo ratings yet
- SEWA-E-D-002 11 KV CableDocument37 pagesSEWA-E-D-002 11 KV Cablezaheer2931No ratings yet
- High Voltage Cables - PrysmianDocument20 pagesHigh Voltage Cables - PrysmianJimmy RiveraNo ratings yet
- AMS 5200 UserManualDocument47 pagesAMS 5200 UserManualabbas dehghanNo ratings yet