You might also like
- Obstacle Detection and Classification Using Deep Learning For Tracking in High-Speed Autonomous DrivingDocument6 pagesObstacle Detection and Classification Using Deep Learning For Tracking in High-Speed Autonomous DrivingthepangeliusNo ratings yet
- Embedded Computer Vision System Detects Traffic ObjectsDocument20 pagesEmbedded Computer Vision System Detects Traffic ObjectseviteNo ratings yet
- Car Detection From Low-Altitude UAV Imagery WithDocument11 pagesCar Detection From Low-Altitude UAV Imagery WithSarahNo ratings yet
- Paper VehiclesDocument7 pagesPaper VehiclesShashankNo ratings yet
- Sarp 2020Document6 pagesSarp 2020Aadith Thillai Arasu SNo ratings yet
- Remotesensing 13 00089 v2Document23 pagesRemotesensing 13 00089 v2Varun GoradiaNo ratings yet
- Ijet V4i3p31 PDFDocument5 pagesIjet V4i3p31 PDFInternational Journal of Engineering and TechniquesNo ratings yet
- 1 s2.0 S0968090X14000606 MainDocument12 pages1 s2.0 S0968090X14000606 MainShashankNo ratings yet
- IRON-MAN Approach Performs Temporal Motionless Video Analysis Using CNNDocument15 pagesIRON-MAN Approach Performs Temporal Motionless Video Analysis Using CNNablaoublasNo ratings yet
- TemporalMotionlessanalysis - MIsba SiddiquiDocument30 pagesTemporalMotionlessanalysis - MIsba SiddiquiMisba SiddiquiNo ratings yet
- Background Information: 2.1 Video ProcessingDocument4 pagesBackground Information: 2.1 Video ProcessingSanika DivekarNo ratings yet
- Vision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied EnvironmentsDocument6 pagesVision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied Environmentsp_p9No ratings yet
- 2017 Eswa DraftDocument13 pages2017 Eswa DraftAbdulazizNo ratings yet
- Robust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDocument6 pagesRobust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDivine Grace BurmalNo ratings yet
- Deep-Drone-Object 2Document8 pagesDeep-Drone-Object 2Samuel BrandNo ratings yet
- Efficient Lightweight Residual Network For Real-Time Road Semantic SegmentationDocument8 pagesEfficient Lightweight Residual Network For Real-Time Road Semantic SegmentationIAES IJAINo ratings yet
- Matecconf dts2017 05005Document4 pagesMatecconf dts2017 05005ThuThao NguyenNo ratings yet
- (IJETA-V10I1P1) :M.Thachayani, G.RubavaniDocument3 pages(IJETA-V10I1P1) :M.Thachayani, G.RubavaniIJETA - EighthSenseGroupNo ratings yet
- Maqueda Event-Based Vision Meets CVPR 2018 PaperDocument9 pagesMaqueda Event-Based Vision Meets CVPR 2018 Paperحسام جعفر كاظمNo ratings yet
- Vehicle Detection and Tracking For Traffic ManagementDocument8 pagesVehicle Detection and Tracking For Traffic ManagementIAES IJAINo ratings yet
- Robust Techniques For Background Subtraction in Urban Traffic VideoDocument12 pagesRobust Techniques For Background Subtraction in Urban Traffic VideoZohaib_Hanif_2870No ratings yet
- Pretrained Vehicle ClassifierDocument11 pagesPretrained Vehicle ClassifierSuvramalya BasakNo ratings yet
- Li 2021Document19 pagesLi 2021Keke LongNo ratings yet
- Object Detection and Its Implementation On Android DevicesDocument8 pagesObject Detection and Its Implementation On Android DevicesPrateek singhNo ratings yet
- Neural-Network-Based Traffic Sign Detection and Recognition in High-Definition Images Using Region Focusing and ParallelizationDocument14 pagesNeural-Network-Based Traffic Sign Detection and Recognition in High-Definition Images Using Region Focusing and ParallelizationVo Hoang Nguyen Vy B1706556No ratings yet
- An Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance SystemDocument6 pagesAn Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance Systematdeen sNo ratings yet
- Iee Paper IotDocument3 pagesIee Paper Iotpp ccNo ratings yet
- Crowd Counting and Monitoring Using Deep LearningDocument4 pagesCrowd Counting and Monitoring Using Deep LearningKotresh DivinNo ratings yet
- Intelligent Traffic-Monitoring System Based On YOLO and Convolutional Fuzzy Neural NetworksDocument14 pagesIntelligent Traffic-Monitoring System Based On YOLO and Convolutional Fuzzy Neural Networksahammedijas2209118No ratings yet
- Kode Password Database 2019Document10 pagesKode Password Database 2019Newbie BienewNo ratings yet
- Reckoning The Vehicle Using Matlab: International Research Journal of Engineering and Technology (IRJET)Document5 pagesReckoning The Vehicle Using Matlab: International Research Journal of Engineering and Technology (IRJET)M Yasir AnjumNo ratings yet
- Spatial-Temporal Fusion Convolutional Neural Network For Simulated Driving Behavior RecognitionDocument7 pagesSpatial-Temporal Fusion Convolutional Neural Network For Simulated Driving Behavior RecognitionBOUMARAF IbtissamNo ratings yet
- Traffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirDocument21 pagesTraffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirRezaei MNo ratings yet
- PreprintTraffic Sign Detection NeurocomputingDocument26 pagesPreprintTraffic Sign Detection Neurocomputingami videogameNo ratings yet
- Traffic Congestion Detection Using Deep LearningDocument3 pagesTraffic Congestion Detection Using Deep LearningEditor IJTSRDNo ratings yet
- On-Line Imaging of Aggregates For Process Control: T.W. Bobo JRDocument8 pagesOn-Line Imaging of Aggregates For Process Control: T.W. Bobo JRDirceu NascimentoNo ratings yet
- Real-time Multiple Vehicle Detection and Tracking from a Moving VehicleDocument15 pagesReal-time Multiple Vehicle Detection and Tracking from a Moving VehicleNatalitza GolbanNo ratings yet
- Pedestrian Detection System Based On Deep LearningDocument5 pagesPedestrian Detection System Based On Deep LearningInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- Basepaper ngt1Document13 pagesBasepaper ngt1Lakshmana Nainar Sundar S.No ratings yet
- Design & Implementation of Real Time Autonomous Car by Using Image Processing & IoTDocument7 pagesDesign & Implementation of Real Time Autonomous Car by Using Image Processing & IoTTv BraviaNo ratings yet
- Large-Scale Image-To-Video Face Retrieval With Convolutional Neural Network FeaturesDocument6 pagesLarge-Scale Image-To-Video Face Retrieval With Convolutional Neural Network FeaturesIAES IJAINo ratings yet
- Video Sensor Network For Real-Time Traff PDFDocument10 pagesVideo Sensor Network For Real-Time Traff PDFMarc Colin VelasquezNo ratings yet
- A Closer Look at Faster R-CNN For Vehicle Detection: Quanfu Fan and Lisa Brown and John SmithDocument6 pagesA Closer Look at Faster R-CNN For Vehicle Detection: Quanfu Fan and Lisa Brown and John SmithRohit BhardwajNo ratings yet
- Deep Convolutional Neural Networks Architecture For An Efficient Emergency Vehicle Classification in Real-Time Traffic MonitoringDocument11 pagesDeep Convolutional Neural Networks Architecture For An Efficient Emergency Vehicle Classification in Real-Time Traffic MonitoringIAES IJAINo ratings yet
- CNN Models To Detect Multiple Leds For Multilateral Occ.: Project: Ieee P802.15 Ig VatDocument9 pagesCNN Models To Detect Multiple Leds For Multilateral Occ.: Project: Ieee P802.15 Ig VatRahul DaddarioNo ratings yet
- Pedestrian Detection Based On Background Compensation With Block-Matching AlgorithmDocument5 pagesPedestrian Detection Based On Background Compensation With Block-Matching AlgorithmSoulayma GazzehNo ratings yet
- Object Detection and Tracking For Traffic SurveillanceDocument5 pagesObject Detection and Tracking For Traffic SurveillanceCliff JaureNo ratings yet
- Mask R CNN Based Vehicle Detection Model For Traffic Management SystemDocument5 pagesMask R CNN Based Vehicle Detection Model For Traffic Management SystemVedant AgrawalNo ratings yet
- Presented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)Document15 pagesPresented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)api-19799369No ratings yet
- Traffic Sign DetectionDocument5 pagesTraffic Sign DetectionSameer SinghNo ratings yet
- Image Processing Applied To TrafficDocument13 pagesImage Processing Applied To TrafficDivya SreeNo ratings yet
- Helmet Detection System Using Mask R-CNNDocument8 pagesHelmet Detection System Using Mask R-CNNbryansantoso8585No ratings yet
- Analytics Article Aug09Document4 pagesAnalytics Article Aug09DoITT_2010No ratings yet
- Morphology Based Moving Vehicle DetectionDocument7 pagesMorphology Based Moving Vehicle DetectionPranjali SawantNo ratings yet
- Research PaperDocument21 pagesResearch Paperdivyashree jadejaNo ratings yet
- Vanity Plate IdentificationDocument7 pagesVanity Plate Identificationswathi8903422971No ratings yet
- Younis 2020Document5 pagesYounis 2020nalakathshamil8No ratings yet
- A Fast Forgery Detection Algo Based On Exponenetial Fourier MomentsDocument16 pagesA Fast Forgery Detection Algo Based On Exponenetial Fourier MomentsNasrullah IqbalNo ratings yet
- IMINT Target Acquisition Using Deep LearningDocument5 pagesIMINT Target Acquisition Using Deep LearningGhazi MarzoukNo ratings yet
- q2 Oral Comm Las 6Document4 pagesq2 Oral Comm Las 6Kristine Inon AbadianoNo ratings yet
- Cambridge International AS & A Level: SOCIOLOGY 9699/12Document4 pagesCambridge International AS & A Level: SOCIOLOGY 9699/12zohaibNo ratings yet
- Strategy vs Game Plan - Key Differences Discussed in 40 CharactersDocument1 pageStrategy vs Game Plan - Key Differences Discussed in 40 CharactersThe EditorNo ratings yet
- Week 02 Lesson in UCSP v.2Document35 pagesWeek 02 Lesson in UCSP v.2acershame123No ratings yet
- Habermas-E PG PathshalaDocument11 pagesHabermas-E PG Pathshalakumar kartikeyaNo ratings yet
- Philosophy Public Affairs - 2023 - Beigang - Reconciling Algorithmic Fairness CriteriaDocument25 pagesPhilosophy Public Affairs - 2023 - Beigang - Reconciling Algorithmic Fairness CriteriaoxygheneNo ratings yet
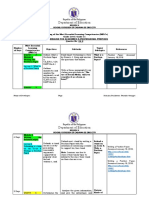
- Subtasking of the Most Essential Learning Competencies (MELCs) for English for Academics and Professional Purposes Grade 11Document12 pagesSubtasking of the Most Essential Learning Competencies (MELCs) for English for Academics and Professional Purposes Grade 11एप्रिल आनंद मॅन्टिकाहोन गेटिगनNo ratings yet
- Gender Differences in Boys and Girls Perception of Teaching and Learning MathematicsDocument18 pagesGender Differences in Boys and Girls Perception of Teaching and Learning Mathematicslivia eunikeNo ratings yet
- Ai 4Document36 pagesAi 4Luân Nguyễn ThànhNo ratings yet
- Community Engagement, Solidarity and CitizenshipDocument53 pagesCommunity Engagement, Solidarity and CitizenshipStefanie RamosNo ratings yet
- Quantitative, Qualitative and Mixed Method ResearchDocument26 pagesQuantitative, Qualitative and Mixed Method ResearchMagnolia KhineNo ratings yet
- Test in MILDocument3 pagesTest in MILGIRLIE CAONo ratings yet
- Communicating Across CulturesDocument8 pagesCommunicating Across CulturesMonica RilveriaNo ratings yet
- Ba LLB English Assignment (Sem 2)Document8 pagesBa LLB English Assignment (Sem 2)Nivida RamtekeNo ratings yet
- Research Analysis-Life Satisfaction Activity 2Document17 pagesResearch Analysis-Life Satisfaction Activity 2Dustin AgsaludNo ratings yet
- Diskusi 2Document8 pagesDiskusi 2Aldo AlamsyahNo ratings yet
- Script in HistoryDocument3 pagesScript in HistoryEarly SaribaNo ratings yet
- Mathematics For Our WorldDocument6 pagesMathematics For Our WorldRica MariaeNo ratings yet
- 2018 Gaétan Breton - A Postmodern Accounting Theory - An Institutional Approach-Emerald PublishingDocument257 pages2018 Gaétan Breton - A Postmodern Accounting Theory - An Institutional Approach-Emerald PublishingPT. Manurung Capital IndonesiaNo ratings yet
- Engineering Metrology: Program: Mechanical Engineering Program Code: ME3I MSBTE Course Code: 22342Document14 pagesEngineering Metrology: Program: Mechanical Engineering Program Code: ME3I MSBTE Course Code: 22342Naresh BesekarNo ratings yet
- Department of Education: Republic of The PhilippinesDocument3 pagesDepartment of Education: Republic of The PhilippinesJhella Basmayor LobarbioNo ratings yet
- Critical Analysis Paper-2 1Document4 pagesCritical Analysis Paper-2 1api-723369017No ratings yet
- IG1 E3 NotebookDocument84 pagesIG1 E3 NotebookNoleenNo ratings yet
- PowerPoint Presentation On Soft Skills.Document12 pagesPowerPoint Presentation On Soft Skills.Bikash SharmaNo ratings yet
- Understanding The Implications of A Global VillageDocument4 pagesUnderstanding The Implications of A Global VillageSaiful Bin Shohrab HossainNo ratings yet
- Rethinking Project Management: A Structured Literature Review With A Critical Look at The Brave New WorldDocument3 pagesRethinking Project Management: A Structured Literature Review With A Critical Look at The Brave New WorldwywpoonNo ratings yet
- Character Map: Information Technology SolutionsDocument4 pagesCharacter Map: Information Technology SolutionsNeil VeirknaruNo ratings yet
- Theory of MindDocument49 pagesTheory of Mindsri nandiniNo ratings yet
- Full Download Ebook PDF Sociology A Down To Earth Approach 14th Edition by James M Henslin PDFDocument42 pagesFull Download Ebook PDF Sociology A Down To Earth Approach 14th Edition by James M Henslin PDFlarry.kell33594% (36)
- (Comdez) - PortfolioDocument53 pages(Comdez) - PortfolioVishal GoyalNo ratings yet