You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SG110CXPV Grid-Connected Inverter User ManualDocument101 pagesSG110CXPV Grid-Connected Inverter User ManualAizat AlongNo ratings yet
- 2. CHUYÊN ĐỀ 2 (LỖI SAI + VIẾT CÂU)Document4 pages2. CHUYÊN ĐỀ 2 (LỖI SAI + VIẾT CÂU)farm 3 chi di0% (1)
- Civil/Structural Calculation SheetDocument19 pagesCivil/Structural Calculation Sheetfbaxter22No ratings yet
- Myon Parent GuideDocument13 pagesMyon Parent Guideapi-527646442No ratings yet
- FCO560 Users Guide Issue 2aDocument63 pagesFCO560 Users Guide Issue 2aJames Mason100% (1)
- Basic Calculus Q4 Week 2 Module 10 CathDocument12 pagesBasic Calculus Q4 Week 2 Module 10 CathLee Marck SeriosNo ratings yet
- Electrical Codes and StandardsDocument21 pagesElectrical Codes and StandardsVirgilioNo ratings yet
- BTECDocument11 pagesBTECRini SandeepNo ratings yet
- Does Not Export The Right Colors by The Bodymovin in The Gradient Issue #1440 Airbnblottie-Web GitHubDocument1 pageDoes Not Export The Right Colors by The Bodymovin in The Gradient Issue #1440 Airbnblottie-Web GitHubAbirama ShankaraNo ratings yet
- Data Domain Command Reference Guide 6.0Document464 pagesData Domain Command Reference Guide 6.0markus_egli100% (1)
- NTC 2008 Example 002 PDFDocument14 pagesNTC 2008 Example 002 PDFMohamed Abo-ZaidNo ratings yet
- (2020-August) Braindump2go New AZ-104 PDF Dumps and AZ-104 VCE Dumps (254-264)Document16 pages(2020-August) Braindump2go New AZ-104 PDF Dumps and AZ-104 VCE Dumps (254-264)arihaNo ratings yet
- Testing and Sampling Parameters for Boiler Water FeedDocument17 pagesTesting and Sampling Parameters for Boiler Water FeedGuruNo ratings yet
- Test Procedure Offer 019-14V 3015Document5 pagesTest Procedure Offer 019-14V 3015sohaibNo ratings yet
- Mahatma Montessori School Computer Science Cycle Test Answer KeyDocument15 pagesMahatma Montessori School Computer Science Cycle Test Answer KeyPranavhari T.N.No ratings yet
- RSP Robinson R44 Quick Start Guide BETA1.1Document14 pagesRSP Robinson R44 Quick Start Guide BETA1.1CristianoVelosodeQueirozNo ratings yet
- Power Off Reset Reason BackupDocument4 pagesPower Off Reset Reason BackupCristhofer DiazNo ratings yet
- Unit 4 (C)Document19 pagesUnit 4 (C)dharmeshNo ratings yet
- Transforming Education in The Digital AgeDocument4 pagesTransforming Education in The Digital AgeAnalyn AgotoNo ratings yet
- Job Vacancies AdvertisementDocument28 pagesJob Vacancies AdvertisementRobert AzihembaNo ratings yet
- Stuxnet: February 2018Document17 pagesStuxnet: February 2018Schubert BalizaNo ratings yet
- S&T Achievements from Marcos to PresentDocument9 pagesS&T Achievements from Marcos to PresentNICOLE IRISH CABUNILASNo ratings yet
- Role of Print Media in AdvertisementDocument14 pagesRole of Print Media in AdvertisementMoond0070% (1)
- HPLC Analysis of Irbesartan and Conjugated MetaboliteDocument8 pagesHPLC Analysis of Irbesartan and Conjugated MetaboliteBrendapaez3No ratings yet
- Smart Waste Segregator Project ReportDocument2 pagesSmart Waste Segregator Project ReportRADHIKA SHRIMANKARNo ratings yet
- Ten-Tec Model 1253 Regenerative Radio KitDocument3 pagesTen-Tec Model 1253 Regenerative Radio KitAteneuNo ratings yet
- Merlin Gerin Medium Voltage Distribution Switchgear Technical ManualDocument18 pagesMerlin Gerin Medium Voltage Distribution Switchgear Technical ManualMohammed Madi100% (1)
- CMT1Document10 pagesCMT1Dongneu Nguyen100% (1)
- Fault Codes HyundaiDocument12 pagesFault Codes HyundaiAnonymous j7LBFXO50% (2)
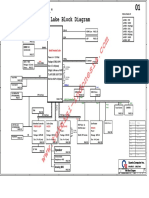
- Intel Gemini Lake Block Diagram EJ-11 ZHE 11"Document37 pagesIntel Gemini Lake Block Diagram EJ-11 ZHE 11"Tomy Aditya PratamaNo ratings yet